1.本发明涉及到智能汽车控制领域,尤其涉及到一种基于车联网环境下的智能汽车换道控制系统和方法。
背景技术:
2.随着互联网技术飞速发展,人类社会进入万物互联的时代,即物联网时代。汽车作为人们必不可少的交通工具和生产工具,网联化发展大势所趋,进而诞生了车联网概念。车联网就是通过车内网、车载移动互联网和车际网,通过汽车收集处理并大量共享信息,实现车与车、车与人、车与路、车与云的连接,进而实现车辆智能化控制和智能交通管理。车联网技术不仅让出行更加安全和环保,还能够实时监控车辆状态,确保汽车安全稳定的行驶。
3.当前发生的交通事故中,很多是驾驶员无法准确判断换道时机盲目换道导致的。智能汽车可以通过决策控制算法来合理规划换道路径,在保证安全的前提下完成换道。目前大多数算法的输入是由车载传感器提供,传感器会存在着感知盲区以及测量偏差的情况,此外传感器会传入大量无用信息,需要过滤出有用信息再做后续处理,对车辆计算能力提出了更高的要求。此外,很多换道模型仅考虑与后方来车的碰撞,场景模式单一,无法满足复杂场景下的避障换道要求。
技术实现要素:
4.本发明为了克服现有技术存在的不足之处,提出了一种基于车联网环境下的智能汽车换道控制系统和方法,以期能判断当前自车与最近车辆的距离是否满足安全距离要求,从而能实现智能汽车安全换道。
5.为了达到上述发明目的,本发明采用如下技术方案:
6.本发明一种基于车联网环境下的智能汽车换道控制系统的特点包括:车载obu设备、模糊神经网络模块、安全距离算法模块、路径规划模块和执行模块:
7.当前车辆上的车载obu设备获取自身车辆的位置、车速、加速度的车辆行驶信息,并接收距离最近的一辆车所广播的车辆行驶信息;
8.当前车辆上的模糊神经网络模块以当前车辆的横向位移和纵向速度作为输入,并输出换道时间后发送给自身的安全距离算法模块和执行模块;所述横向位移为当前车辆的车道中心到换道车道的中心距离,即车道宽;
9.当前车辆的安全距离算法模块根据自身与距离最近车辆的位置关系、两车的速度、两车的加速度和自车的换道时间,计算出完成换道的安全距离;
10.当前车辆的路径规划模块根据自车与最近车辆的当前距离,判断是否满足安全距离,当满足安全距离时,再根据换道时间及侧向加速度,采用基于正弦特性的路径模型规划出路径曲线,从而计算出的航向角并发送给执行模块;
11.当前车辆的执行模块根据航向角及换道时间控制当前车辆完成安全换道。
12.本发明一种基于车联网环境下的智能汽车换道控制方法的特点是按如下步骤进
行:
13.步骤1、利用车载obu设备获取自车的位置(x0,y0)、纵向车速v0、纵向加速度a0以及最近相邻车辆的位置(x
near
,y
near
)、纵向车速v
near
和纵向加速度a
near
;
14.步骤2、基于公开的车辆轨迹数据集,以有监督的学习算法为学习规则,并利用梯度下降法对模糊神经网络进行训练,得到换道时间预测模型;
15.将自车的横向位移和纵向车速v0入所述换道时间预测模型中,并输出换道时间;
16.步骤3、根据两车位置关系确定安全距离:
17.所述两车位置关系包括:自车与后方相邻车道车辆的第1种位置关系、自车与后方本车道车辆的第2种位置关系、自车与前方相邻车道车辆的第3种位置关系、自车与前方本车道车辆的第4种位置关系;
18.若为第1种位置关系,则利用式(1)确定t时刻的安全距离s
cb1
(t):
[0019][0020]
式(1)中:s
cb1
(t)为自车与后方相邻车道车辆在t时刻的纵向距离,s
cb1
(0)为自车与后方相邻车道车辆换道前的初始纵向距离,v0(0)为自车换道前的初始车速,v
cb1
(0)为后方相邻车道车辆换道前的初始纵向速度,a0(τ)为自车τ时刻的纵向加速度,a
cb1
(τ)为相邻车道后方车辆τ时刻的纵向加速度,l为相邻车道后方车辆车长,τ∈[0,t];
[0021]
若为第2种位置关系,则利用式(2)确定t时刻的安全距离s
cb2
(t):
[0022][0023]
式(2)中:s
cb2
(t)为自车与后方本车道车辆在t时刻的纵向距离,s
cb2
(0)为自车与后方本车道车辆换道前的初始纵向距离,v
cb2
(0)为后方本车道车辆换道前的初始纵向速度,a
cb2
(τ)为后方本车道后方车辆τ时刻的纵向加速度;
[0024]
若为第3种位置关系,则利用式(3)确定t时刻的安全距离s
cf1
(t):
[0025][0026]
式(3)中:s
cf1
(t)为自车与前方相邻车道车辆t时刻的纵向距离,s
cf1
(0)为自车与前方相邻车道车辆换道前的初始纵向距离,v
cf1
(0)为前方相邻车道车辆换道前的初始纵向速度,a
cf1
(τ)为前方相邻车道车辆任意τ时刻的纵向加速度;
[0027]
若为第4种位置关系,则利用式(4)确定t时刻的安全距离s
cf2
(t):
[0028][0029]
式(4)中:s
cf2
(t)为自车与前方本车道车辆t时刻的纵向距离,s
cf2
(0)为自车与前方本车道车辆换道前的初始纵向距离,v
cf2
(0)为前方本车道车辆换道前的初始纵向速度,a
cf2
(τ)为前方本车道车辆任意τ时刻的纵向加速度;
[0030]
步骤4、计算本车与最近车辆在t时刻车距,并判断t时刻车距是否大于t时刻的安全距离:若大于即满足安全距离要求,则建立式(5)路径曲线,并根据式(6)计算航向角θ;否则,不换道,并返回步骤1:
[0031][0032]
式(5)中:(x,y)为路径曲线的横纵坐标,h为整个换道过程中自车的横向位移,l为整个换道过程中自车的纵向位移;
[0033][0034]
式(6)中:y
′
为对式(5)求导的导函数;
[0035]
步骤5、所述执行模块根据所述换道时间预测模型输出的换道时间和所述航向角θ来调整自车的车速和转向角,从而实现安全换道。
[0036]
与已有的技术相比,本发明有益效果体现在:
[0037]
1、本发明提出通过v2x方法获取车辆信息。车载obu设备部署在车端,连接车辆can总线,既可以获取车辆自身位置、车速、加速度等行驶信息,也可以同其他已安装车载设备的车辆进行数据交互;自车通过v2v通信方式获取周围车辆的行驶信息。目前获取车辆行驶信息主流方法是通过车载传感器获取的,而通过v2x方法获取车辆行驶信息不仅能解决车载传感器因探测范围存在局限而出现盲区的问题,还能避免车载传感器获取大量无效数据而带来的计算压力和时延的问题。
[0038]
2、本发明中提出了模糊神经网络学习方法,神经网络具有自学习和自调整的特性,模糊控制又有着强的逻辑关系。通过导入经筛选后的公开数据集,不断训练和学习优化,输出尽可能符合人类驾驶员换道习惯、换道过程更加舒适的换到时间。
[0039]
3、本发明提出的换道场景更加全面。传统换道控制只考虑自车换道时是否与后方来车发生碰撞,而换道时可能会发生其他形式的碰撞,而本发明还提出换道完成前自车与相邻车道前方车辆、自车与本车道后方车辆、自车与本车道前方车辆等另外三种可能发生的碰撞场景;智能汽车可以根据两车之间的相对位置,自适应调整安全距离算法。
附图说明
[0040]
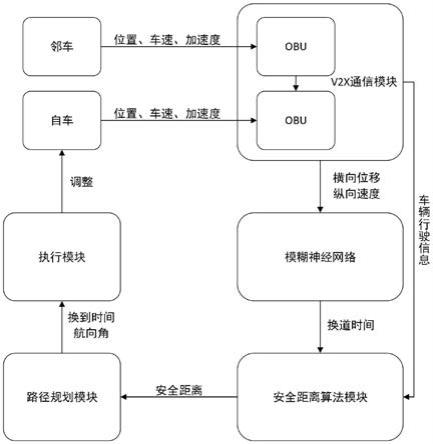
图1为本发明的系统结构图;
[0041]
图2为本发明的双车道换道场景图;
[0042]
图3为本发明的换道过程图。
具体实施方式
[0043]
本实施例中,如图1所示,一种基于车联网环境下的智能汽车换道控制系统,包括:车载obu设备、模糊神经网络模块、安全距离算法模块、路径规划模块和执行模块:
[0044]
当前车辆上的车载obu设备获取自身车辆的位置、车速、加速度的车辆行驶信息,并接收距离最近的一辆车所广播的车辆行驶信息;
[0045]
当前车辆上的模糊神经网络模块以当前车辆的横向位移和纵向速度作为输入,并输出换道时间后发送给自身的安全距离算法模块和执行模块;横向位移为当前车辆的车道中心到换道车道的中心距离,即车道宽;
[0046]
当前车辆的安全距离算法模块根据自身与距离最近车辆的位置关系、两车的速
度、两车的加速度和自车的换道时间,计算出完成换道的安全距离;
[0047]
当前车辆的路径规划模块根据自车与最近车辆的当前距离,判断是否满足安全距离,当满足安全距离时,再根据换道时间及侧向加速度,采用基于正弦特性的路径模型规划出路径曲线,从而计算出的航向角并发送给执行模块;
[0048]
当前车辆的执行模块根据航向角及换道时间控制当前车辆完成安全换道。
[0049]
本实施例中,一种基于车联网环境下的智能汽车换道控制方法是按如下步骤进行:
[0050]
步骤1、利用车载obu设备获取自车的位置(x0,y0)、纵向车速v0、纵向加速度a0以及最近相邻车辆的位置(x
near
,y
near
)、纵向车速v
near
和纵向加速度a
near
;
[0051]
步骤2、基于公开的车辆轨迹数据集,以有监督的学习算法为学习规则,并利用梯度下降法对模糊神经网络进行训练,得到换道时间预测模型;
[0052]
公开的车辆轨迹数据集是经过筛选后的、满足正常换道条件下的车辆轨迹数据;
[0053]
梯度下降法,通过迭代的方式求得最优解,在给定初始值后,通过迭代找到下一时刻更优的值,由数学定义可知,yn(t)处负梯度方向为最速下降方向,所以搜索方向为:
[0054][0055]
由式(1)可以确定最速下降法的学习公式为:
[0056][0057]
式(2)中:yn(t)为t时刻输入值的状态量,y
n+1
(t)为t时刻的输出值,η为学习率。
[0058]
模型网络结构的隐含层传递函数为sigmoid函数,输出层的传递函数为线性函数。
[0059]
误差采用最小化均方根差来衡量:
[0060][0061]
式(3)中:y
di
为神经网络输出量,yi为监督数据,n为数据的维度。
[0062]
网络权值调整采用串行方式,权值的误差反向传播方式为
[0063][0064]
式(4)中:δω
ij
(n)为权值调整量,为局部梯度,为上一层的输出值。
[0065]
将自车的横向位移和纵向车速v0入换道时间预测模型中,并输出换道时间;
[0066]
步骤3、根据两车位置关系确定安全距离:
[0067]
如图2所示,由于车辆在多车道向左或向右换道具有对称性,所以简化为的双车道换道场景模型。两车位置关系包括:自车与后方相邻车道车辆的第1种位置关系、自车与后方本车道车辆的第2种位置关系、自车与前方相邻车道车辆的第3种位置关系、自车与前方本车道车辆的第4种位置关系;
[0068]
若为第1种位置关系,自车与后方相邻车道车辆发生碰撞的情况是自车换道即将完成时后方邻车追尾,此情况下所要满足的条件就是自车在相同时间内的纵向位移要大于后方邻车的纵向位移,利用式(5)确定t时刻的安全距离s
cb1
(t):
[0069]
[0070]
式(5)中:s
cb1
(t)为自车与后方相邻车道车辆在t时刻的纵向距离,s
cb1
(0)为自车与后方相邻车道车辆换道前的初始纵向距离,v0(0)为自车换道前的初始车速,v
cb1
(0)为后方相邻车道车辆换道前的初始纵向速度,a0(τ)为自车τ时刻的纵向加速度,a
cb1
(τ)为相邻车道后方车辆τ时刻的纵向加速度,l为相邻车道后方车辆车长,τ∈[0,t];
[0071]
若为第2种位置关系,自车与后方本车道行驶的车辆可能发生的碰撞情况是自车换道完成前后方本车道车辆追尾,利用式(6)确定t时刻的安全距离s
cb2
(t):
[0072][0073]
式(6)中:s
cb2
(t)为自车与后方本车道车辆在t时刻的纵向距离,s
cb2
(0)为自车与后方本车道车辆换道前的初始纵向距离,v
cb2
(0)为后方本车道车辆换道前的初始纵向速度,a
cb2
(τ)为后方本车道后方车辆τ时刻的纵向加速度;
[0074]
若为第3种位置关系,自车与前方相邻车道车辆发生的碰撞情况是自车换道即将完成时追尾前方邻车,此情况下所要满足的条件就是自车在相同时间内的纵向位移要小于前方邻车的纵向位移,利用式(3)确定t时刻的安全距离s
cf1
(t):
[0075][0076]
式(7)中:s
cf1
(t)为自车与前方相邻车道车辆t时刻的纵向距离,s
cf1
(0)为自车与前方相邻车道车辆换道前的初始纵向距离,v
cf1
(0)为前方相邻车道车辆换道前的初始纵向速度,a
cf1
(τ)为前方相邻车道车辆任意τ时刻的纵向加速度;
[0077]
若为第4种位置关系,自车与前方本车道行驶的车辆可能发生的碰撞情况是自车换道完成前追尾前方本车道车辆,利用式(8)确定t时刻的安全距离s
cf2
(t):
[0078][0079]
式(8)中:s
cf2
(t)为自车与前方本车道车辆t时刻的纵向距离,s
cf2
(0)为自车与前方本车道车辆换道前的初始纵向距离,v
cf2
(0)为前方本车道车辆换道前的初始纵向速度,a
cf2
(τ)为前方本车道车辆任意τ时刻的纵向加速度;
[0080]
步骤4、计算本车与最近车辆在t时刻车距,并判断t时刻车距是否大于t时刻的安全距离:若大于即满足安全距离要求,如图3所示,采用基于正弦特性的路径模型建立路径曲线并计算航向角,实施安全换道;否则,不换道,并返回步骤1:
[0081]
t0至t1时刻为换道准备过程;t1时刻改变方向盘转角开始换道;t2时刻结束换道,t为换道时间,其间,总的纵向位移为l,总的横向位移为h。侧向加速度ay(t)为:
[0082][0083]
式(9)中,a为待定系数,积分可知:
[0084][0085]
解得:
[0086][0087]
故式(9)可写成:
[0088][0089]
侧向速度由侧向加速度积分得出:
[0090][0091]
侧向位移由侧向速度积分得出:
[0092][0093]
由于汽车通常不会大幅急速换道,所以轨迹曲率半径较大,故纵向位移可近似按双圆弧计算:
[0094][0095]
式(15)中,a为自车车长,为稳态前轮侧偏角;整理可得总的纵向位移l为:
[0096][0097]
坐标关系为:
[0098][0099]
式(17)中:(x,y)为路径曲线的横纵坐标;
[0100]
航向角为:
[0101][0102]
式(18)中:y
′
为对式(5)求导的导函数;
[0103]
步骤5、执行模块根据换道时间预测模型输出的换道时间和航向角θ来调整自车的车速和转向角,从而实现安全换道。