1.本实用新型涉及地铁隧道测量技术领域,具体涉及一种可调节轨距的地铁移动三维激光扫描装置。
背景技术:
2.移动三维激光扫描作为一种快速获取环境测量信息的手段,在地铁盾构隧道质量检测中得到了大规模应用,地铁隧道移动扫描系统通常由搭载三维激光扫描仪的轨道移动载体组成,使用隧道内既有轨道进行快速移动。
3.如发明专利201711392226.0所公开的移动扫描设备,现有的大部分轨道移动载体存在设备体积较大,设备重量较沉,不易搬运;设备仅适用于标准轨距轨道,无法应用于采用非标准轨道的隧道建设期或电力管廊中。
技术实现要素:
4.本实用新型的目的就是为了解决上述地铁移动扫描载体的弊端,提供一种可调节轨距的地铁移动三维激光扫描装置,该装置的四个传动轮采用伸缩式设计,当放置在轨道上时可以采用42步进电机将四个轮子伸出,通过位置传感器将轮子伸缩至事先设定好的轨距,从而使本实用新型能够适应多种轨道扫描环境,具备通用性强的优点。
5.本实用新型的实现由以下技术方案构成。
6.一种可调节轨距的地铁移动三维激光扫描装置,用于搭载三维激光扫描仪在多种轨距的轨道上进行匀速移动,快速采集周围隧道环境,完成隧道变形检测任务。该装置由车体框架、照明系统、动力系统、扫描系统、控制系统组成,能够通过伸缩控制杆与42步进电机控制两侧轮距,使该装置可以恰当的安置在不同轨距的轨道上;通过86闭环步进电机与传动装置将电机动力传送至尼龙轨道轮,使得装置可以在轨道上电动匀速前进;通过扫描支架安置扫描仪,使该装置实现对周围隧道环境的激光扫描;通过照明系统实现在隧道昏暗环境下的照明;通过控制系统实现对轨距的调节控制与装置的匀速前进、停止、后退。现结合图2内部结构示意图对本实用新型的轨道轮伸缩式设计与动力传输进行详细说明,本实用新型的轨道轮伸缩功能是通过步进电机19产生驱动力,驱动伸缩控制杆5进行伸缩运动,伸缩控制杆5通过螺栓连接在轮毂罩2上,伸缩控制杆5进行伸缩运动会带动轮毂罩2进行相应的伸缩运动,轮毂罩2与尼龙轨道轮12中的轴承相连,可带动轨道轮12一同进行相应的伸缩运动,以此实现轨道轮的伸缩功能,从而自由调整两侧轮距,解决在不同轨距的轨道上进行架设的难题。本实用新型的前进后退动力由闭环步进电机20提供,通过同步带23带动同步轮21,将动力通过伸缩传动轴4传动至尼龙轨道轮12,传动结构设计如图2所示,可实现本装置匀速前进、停止、后退功能。
7.本实用新型的优点是,该装置四个尼龙轨道轮采用伸缩式设计,装置运输与储存时轨道轮缩进车体框架内,装置安置于轨道上进行工作时可以根据实时轨距进行调节,将四个尼龙轨道轮伸出安置在轨道上,使得本装置体积较小且重量较轻,易于搬运;通过电机
与传动装置,实现本实用新型装置的自动匀速前进,配合扫描支架安置扫描仪,可以实现在多种轨道扫描环境下的隧道移动式匀速三维激光扫描,具备效率高、通用性强的特点。
附图说明
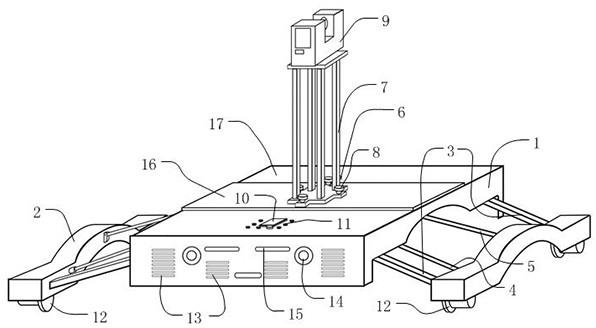
8.图1为本实用新型搭载扫描仪的立体视图。
9.图2为本实用新型内部结构示意图。
10.图3为本实用新型轮子收缩与伸出状态下的主视图。
11.图4为本实用新型轮子收缩与伸出状态下的侧视图。
12.图5为本实用新型轮子收缩与伸出状态下的俯视图。
具体实施方式
13.为便于同行业技术人员的理解,以下结合附图通过实施例对本实用新型的特征及其它相关特征作进一步详细说明。
14.如图1~图5所示,图中标记1
‑
29分别为:车主体框架1、轮毂罩2、伸缩滑块3、伸缩传动轴4、伸缩控制杆5、电池盖锁6、扫描支架7、支架固定螺栓8、三维激光扫描仪9、控制触摸屏10、控制按钮11、尼龙轨道轮12、散热孔13、led大灯14、搬运手持孔15、支架托板16、电池盒盖17、电池18、42步进电机19、86闭环步进电机20、同步轮21、位置传感器22、同步带23、万向轴承座24、86闭环步进电机驱动器25、伸缩杆驱动器26、2.4g无线控制器27、仪器支架安装孔28、扫描仪定位销29。
15.所述的车体框架包括:车主体框架1、轮毂罩2、伸缩滑块3、伸缩控制杆5、电池盖锁6、尼龙轨道轮12、散热孔13、搬运手持孔15、支架托板16、电池盒盖17、仪器支架安装孔28。
16.所述的照明系统包括:led大灯14。
17.所述的动力系统包括:伸缩传动轴4、锂电池18、42步进电机19、86闭环步进电机20、同步轮21、同步带23、万向轴承座24。
18.所述的扫描系统包括:扫描支架7、支架固定螺栓8、三维激光扫描仪9、扫描仪定位销29。
19.所述的控制系统包括:控制触摸屏10、控制按钮11、位置传感器22、86闭环步进电机驱动器25、伸缩杆驱动器26、2.4g无线控制器27。
20.实施例:在具体的实施过程中,该装置的使用涉及以下步骤。
21.1.运输:在运输过程中尼龙轨道轮12是缩在车主体框架1内部的,如图3~图5轮子收缩状态。
22.2.搬运:使用搬运手持孔15将装置搬运至轨道处。
23.3.两侧轨道轮伸出后安置于轨道上:使用控制触摸屏10、控制按钮11控制伸缩杆驱动器26驱动42步进电机19将伸缩控制杆5进行推出,同时带动伸缩滑块3、伸缩传动轴4、轮毂罩2、尼龙轨道轮12一同伸出,通过位置传感器22感知伸缩滑块3伸出尺寸,当达到预设轨距时42步进电机19自动停止,四个尼龙轨道轮12到达指定位置,两侧轮子伸出后的状态如图3~图5轮子伸出状态,之后可以将该装置恰当的安置于轨道上。
24.4.安装扫描仪:使用支架固定螺栓8将扫描支架7安装于器支架安装孔28上,将三维激光扫描仪9安装于扫描仪定位销29,安装后的状态如图1所示,之后可以进行具体扫描
工作。
25.5.运行扫描装置:使用控制触摸屏10、控制按钮11,或使用手机相应控制app通过蓝牙连接至2.4g无线控制器27打开led大灯14,设定匀速前进速度,通过锂电池18提供电力,控制86闭环步进电机驱动器25驱动86闭环步进电机20,通过同步带23带动同步轮21,将动力通过伸缩传动轴4传动至尼龙轨道轮12,实现本装置匀速前进、停止、后退。
26.6.扫描结束:将扫描支架7卸下,三维激光扫描仪9卸下,使用控制触摸屏10、控制按钮11或手机app进行操作,将两侧尼龙轨道轮12收缩回车主体框架1内部,结束本次扫描测量。
27.本实用新型的优点是,该装置四个尼龙轨道轮采用伸缩式设计,装置运输与储存时轨道轮缩进车体框架内,装置安置于轨道上进行工作时可以根据实时轨距进行调节,将四个尼龙轨道轮伸出安置在轨道上,使得本装置体积较小且重量较轻,易于搬运;通过电机与传动装置,实现本实用新型装置的自动匀速前进,配合扫描支架安置扫描仪,可以实现在多种轨道扫描环境下的隧道移动式匀速三维激光扫描,具备效率高、通用性强的特点。
技术特征:
1.一种可调节轨距的地铁移动三维激光扫描装置,用于搭载三维激光扫描仪在多种轨距的轨道上进行匀速移动,快速采集周围隧道环境,完成隧道变形检测任务,其特征在于:该装置的四个传动轮采用伸缩式设计,当放置在轨道上时可以采用42步进电机将四个轮子伸出,通过位置传感器将轮子伸缩至事先设定好的轨距;该装置由车体框架、照明系统、动力系统、扫描系统、控制系统组成,能够通过伸缩控制杆与42步进电机控制两侧轮距,使该装置可以恰当的安置在不同轨距的轨道上;通过86闭环步进电机与传动装置将电机动力传送至尼龙轨道轮,使得装置可以在轨道上电动匀速前进;通过扫描支架安置扫描仪,使该装置实现对周围隧道环境的激光扫描;通过照明系统实现在隧道昏暗环境下的照明;通过控制系统实现对轨距的调节控制与装置的匀速前进、停止、后退。2.根据权利要求1所述的一种可调节轨距的地铁移动三维激光扫描装置,其特征在于:所述的车体框架包括:车主体框架(1)、轮毂罩(2)、伸缩滑块(3)、伸缩控制杆(5)、电池盖锁(6)、尼龙轨道轮(12)、散热孔(13)、搬运手持孔(15)、支架托板(16)、电池盒盖(17)、仪器支架安装孔(28)。3.根据权利要求1所述的一种可调节轨距的地铁移动三维激光扫描装置,其特征在于:所述的照明系统包括:led大灯(14)。4.根据权利要求1所述的一种可调节轨距的地铁移动三维激光扫描装置,其特征在于:所述的动力系统包括:伸缩传动轴(4)、锂电池(18)、42步进电机(19)、86闭环步进电机(20)、同步轮(21)、同步带(23)、万向轴承座(24)。5.根据权利要求1所述的一种可调节轨距的地铁移动三维激光扫描装置,其特征在于:所述的扫描系统包括:扫描支架(7)、支架固定螺栓(8)、三维激光扫描仪(9)、扫描仪定位销(29)。6.根据权利要求1所述的一种可调节轨距的地铁移动三维激光扫描装置,其特征在于:所述的控制系统包括:控制触摸屏(10)、控制按钮(11)、位置传感器(22)、86闭环步进电机驱动器(25)、伸缩杆驱动器(26)、2.4g无线控制器(27)。
技术总结
本实用提供了一种可调节轨距的地铁移动三维激光扫描装置,涉及地铁隧道测量技术领域,用于搭载三维激光扫描仪在多种轨距的轨道上进行匀速移动,快速采集周围隧道环境,完成隧道变形检测任务。该装置由车体框架、照明系统、动力系统、扫描系统、控制系统组成,能够通过伸缩控制杆与42步进电机控制两侧轮距,使该装置可以恰当的安置在不同轨距的轨道上,装置运输与储存时轨道轮缩进车体框架内,装置安置于轨道上进行工作时可以根据实时轨距进行调节,使得本装置体积较小且重量较轻,易于搬运;通过搭载三维激光扫描仪,使用电机与传动装置,实现在多种轨道扫描环境下的隧道移动式匀速三维激光扫描,具备效率高、通用性强的特点。通用性强的特点。通用性强的特点。
技术研发人员:樊勇 王子轩
受保护的技术使用者:上海京海工程技术有限公司
技术研发日:2021.04.28
技术公布日:2021/12/11