1.本发明涉及一种手机玻璃滚筒刷智能机电三体化全自动生产线。
背景技术:
2.现有手机玻璃滚筒刷生产各工序均采用人工操作,如,通过人工切割原料长管成短管段,再通过人工对短管段进行车工、形成刷柄,通过人工转运刷柄至植毛车间进行人工植毛;即使通过设备改进,对刷柄进行机械植毛,机械植毛时需要人工安装刷柄至植毛机上,生产效率低,且操作精度低,成品率低,耗工耗时,劳动强度大。
3.因此,开发一种生产效率高、操作精度高,成品率高,省工省时,降低劳动强度的手机玻璃滚筒刷自动生产线很有必要。
技术实现要素:
4.本发明的目的是为了提供一种手机玻璃滚筒刷智能机电三体化全自动生产线,生产效率高、操作精度高,成品率高,省工省时,降低劳动强度。
5.为了实现上述目的,本发明的技术方案为:为了实现上述目的,本发明的技术方案为:手机玻璃滚筒刷智能机电三体化全自动生产线,其特征在于:包括上管部分、车管部分和植毛部分;车管部分位于上管部分与植毛部分之间;上管部分与车管部分并列放置;植毛部分位于车管部分侧方;
6.上管部分包括储柄结构、上管支架、管定心传送结构、切管结构和管驱动结构;储柄结构、管定心传送结构、切管结构和管驱动结构均设置在上管支架上;其中,储柄结构安装在上管支架侧面,管定心传送结构、切管结构和管驱动结构沿待装长管运送方向依次安装在上管支架上端;切管结构位于管定心传送结构与管驱动结构之间。
7.在上述技术方案中,储柄结构包括储柄架、储柄限位板和顶管板;储柄限位板和顶管板均安装在储柄架上;储柄限位板位于顶管板与管定心传送结构之间;储柄架包括管托架和管整齐限位架;管整齐限位架设置在管托架外侧、且位于管托架与切管结构之间;
8.管托架、管整齐限位架均倾斜安装在上管支架侧面。
9.在上述技术方案中,管定心传送结构包括管定心传送滚轮、管定心支架和管挡板;管定心支架有多个,多个管定心支架间隔安装在上管支架上;管定心支架上安装多个管定心传送滚轮,多个管定心传送滚轮在管定心支架上设置呈v型结构;管挡板竖直安装在管定心支架上、且位于管定心支架外侧。
10.在上述技术方案中,切管结构包括防跳动压轮装置、刀片动力电机;刀片与刀片动力电机连接;防跳动压轮装置包括防跳动架、管定心旋转滚轮结构、管旋转压轮结构和压轮驱动气缸;管定心旋转滚轮结构安装在防跳动架下端;管定心旋转滚轮结构包括管定心旋转滚轮支架和管定心旋转滚轮;管定心旋转滚轮支架上安装多个管定心旋转滚轮,多个管定心旋转滚轮在管定心旋转滚轮支架上设置呈v型结构;管定心旋转滚轮支架与管定心支架呈平行设置;管旋转压轮结构活动安装在防跳动架上部、且位于管定心旋转滚轮结构上
方。
11.在上述技术方案中,管驱动结构包括旋转气动卡盘、旋转气动卡盘夹紧气缸、旋转驱动电机;旋转气动卡盘夹紧气缸与旋转气动卡盘连接;旋转气动卡盘与旋转驱动电机连接。
12.在上述技术方案中,车管部分包括衍架、机械手、车管支架、卡爪座和车管刀架结构;卡爪座和车管刀架结构均安装在车管支架上;衍架罩在车管支架外周。
13.在上述技术方案中,机械手为三轴机械手;机械手包括第一机械手和第二机械手;第一机械手、第二机械手分别与衍架活动连接;第一机械手上安装第一钳口;第二机械手上安装铣钳一体结构。
14.在上述技术方案中,卡爪座包括第一卡爪座和第二卡爪座;第一卡爪座固定安装在车管支架一端;第二卡爪座与车管支架活动连接;车管刀架结构与车管支架活动连接、且位于第一卡爪座与第二卡爪座之间。
15.在上述技术方案中,第一卡爪座上设置外夹爪气动卡盘;第二卡爪座上设置内撑爪气动卡盘。
16.在上述技术方案中,车管刀架结构包括车刀、刀架、车管刀架支撑板和刀架支撑板;刀架安装在车管刀架支撑板上;车管刀架支撑板与刀架支撑板活动连接;刀架支撑板与车管支架活动连接;车刀包括第一车刀、第二车刀、第三车刀和第四车刀;
17.刀架包括电动刀架和排刀架;排刀架有二个,其中一个排刀架上安装第二车刀;另一个排刀架上安装第四车刀;电动刀架上安装第一车刀、第三车刀。
18.在上述技术方案中,所述的手机玻璃滚筒刷智能机电三体化全自动生产线的生产方法,包括如下步骤:
19.步骤一:机器启动;
20.手机玻璃滚筒刷智能机电三体化全自动生产线启动;
21.步骤二:上管部分进行送管、切管操作;
22.送管操作:位于储柄结构运送工位上的待装长管通过顶管板顶起、在顶板斜面和待装长管的重力作用下将待装长管安装在多个管定心传送滚轮形成的v型结构中;管驱动结构的旋转气动卡盘伸入待装长管一端的内孔,固定、并拖出待装长管,同时管定心传送滚轮滚动,与管驱动结构一起运送待装长管至下一个加工工位,此时,待装长管位于防跳动压轮装置中部;
23.切管操作:防跳动压轮装置压紧待装长管长管的管身,旋转驱动电机带动待装长管保持旋转状态,刀片在刀片动力电机和切刀动力电机的驱动下切割待装长管成设定长度的管段;此时,旋转气动卡盘向后移动,拖出管段;
24.步骤三:车管部分进行运送管段、车管的操作;
25.第一次运送管段及车管操作:第一机械手在衍架上横向运动至管段上方,再进行竖向移动至管段处,第一钳口松开、套住管段、并夹紧,第一机械手依次进行竖向向上、横向及竖向向下移动,将管段运送至第一卡爪座处,第一卡爪座上的外夹爪气动卡盘夹紧管段一端,车管刀架结构横向移动至邻近第一卡爪座的预设加工位置,通过第一车刀车削管段一端面,车刀纵向移动使第二车刀位于加工工位、继续车削管段内孔、形成内孔及倒圆角结构;
26.第二次运送管段及车管操作:车管刀架结构纵向移动、退出加工工位,留出管段传送空间,第二卡爪座横向移动至邻近第一卡爪座的预设加工位置,通过内撑爪气动卡盘撑紧管段在上一步加工的管段车削内孔、此时外夹爪气动卡盘松开管段,第二卡爪座横向移动带动管段退回加工工位;车管刀架结构横向移动至邻近第二卡爪座的预设加工位置,通过第三车刀车削管段另一端面以及向后车管段的全部外缘,车刀纵向移动使第四车刀位于加工工位、继续车削管段、形成内孔及倒圆角结构;
27.铣槽及第三次运送管段;第二机械手在衍架上横向、竖向运动,带动铣钳一体结构移动至铣槽工位,铣槽电动轴机构对固定在内撑爪气动卡盘上的管段进行铣槽操作,形成成品刷柄;铣钳旋转气缸驱动铣钳一体结构旋转度,使铣槽电动轴机构与第二钳口换位,使第二钳口位于夹持工位,夹紧成品刷柄、此时内撑爪气动卡盘松开成品刷柄,第二机械手横向向左移动、拖出成品刷柄,然后在衍架上依次进行竖向向上、横向向右、竖向向下运动,将成品刷柄自动送至植毛部分处;
28.步骤四:植毛部分进行钻孔、植毛机剪毛操作;
29.植毛部分对位于其上的成品刷柄进行钻孔、植毛机剪毛操作,形成成品刷。
30.本发明具有如下优点:
31.生产效率高、操作精度高,成品率高,省工省时,降低劳动强度;克服了现有技术完全依赖人工进行各工序的操作,生产效率低,且操作精度低,成品率低,耗工耗时,劳动强度大的缺点。
32.采用本发明所述手机玻璃滚筒刷智能机电三体化全自动生产线进行手机玻璃滚筒刷的生产,能自动实现手机玻璃滚筒刷的全部生产工序(包括原料长管(即待装长管)自动运送、切割工序,管段自动运送工序,自动车管工序、成品刷柄自动运送工序,全自动钻孔、植毛、剪毛工序),无需人工参与,生产效率高、操作精度高,成品率高,省工省时,降低劳动强度。
33.采用本发明所述手机玻璃滚筒刷智能机电三体化全自动生产线进行手机玻璃滚筒刷的生产,能实现从原料长管到成品刷的整个工序的全自动生产、无需人工参与,一个人工可以控制5~10台本发明所述全自动生产线,劳动强度小、生产效率高、且大大节省人工;克服了现有手机玻璃滚筒刷生产各工序均采用人工操作效率低,解决了从原料长管到成品刷的整个工序至少需要6个人工,生产效率低,劳动强度大的缺点。
附图说明
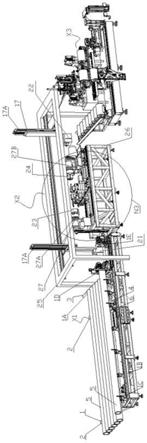
34.图1为本发明的整体结构示意图一。
35.图2为图1的n3处放大图。
36.图3为本发明的整体结构示意图二。
37.图4为本发明中的上管部分、车管部分连接的局部结构示意图一。
38.图5为本发明中的上管部分、车管部分连接的局部结构示意图二。
39.图6为本发明的整体结构示意图三。
40.图7为本发明中的上管部分、车管部分连接的局部结构示意图三。
41.图8为图7的n1处放大图。
42.图9为本发明中的上管部分、车管部分、植毛部分连接的局部结构示意图。
内撑爪气动卡盘,25-衍架,26-车管支架,27-卡爪座,27a-第一卡爪座,27b-第二卡爪座,x1-上管部分,1a-储柄结构,1b-上管支架,1c-管定心传送结构,1d-切管结构,1e-管驱动结构,x2-车管部分,x3-植毛部分,t1-刀片,t2-切刀滑块,t3-管驱动导轨,t4-管驱动滑块,t5-管段,t6-机械手横向导轨,t7-第二钳口,t8-铣槽电动轴机构,t9-铣钳旋转气缸,t10-内爪旋转电机,t11-第一导轨,t12-第二导轨,t13-第三导轨,t14-外爪旋转电机,t15-成品刷柄。
具体实施方式
66.下面结合附图详细说明本发明的实施情况,但它们并不构成对本发明的限定,仅作举例而已。同时通过说明使本发明的优点将变得更加清楚和容易理解。
67.参阅附图可知:手机玻璃滚筒刷智能机电三体化全自动生产线,包括上管部分x1、车管部分x2和植毛部分x3;车管部分x2位于上管部分x1与植毛部分x3之间;上管部分x1与车管部分x2并列放置;植毛部分x3位于车管部分x2侧方;上管部分x1包括储柄结构1a、方形上管支架1b、管定心传送结构1c、切管结构1d和管驱动结构1e;储柄结构1a、管定心传送结构1c、切管结构1d和管驱动结构1e均设置在上管支架1b上;其中,储柄结构1a安装在上管支架1b侧面,管定心传送结构1c、切管结构1d和管驱动结构1e沿待装长管5运送方向依次安装在上管支架1b上端;切管结构1d位于管定心传送结构1c与管驱动结构1e之间。
68.进一步地,储柄结构1a包括储柄架1、储柄限位板4和顶管板6;储柄限位板4和顶管板6均安装在储柄架1上;储柄限位板4位于顶管板6与管定心传送结构1c之间、且位于待装长管5下方;顶管板6用于顶起加工待装长管5、使待装长管5进入管定心传送结构1c,进行定心传送;储柄限位板4用于分隔待加工加工待装长管5与加工待装长管5,对待加工加工待装长管5进行限位;储柄限位板4和顶管板6的顶端均设置呈倾斜结构,便于待装长管5在重力作用下通行、进入管定心传送结构1c;
69.储柄架1包括管托架2和管整齐限位架3;管整齐限位架3设置在管托架2外侧、且位于管托架2与切管结构1d之间;管托架2、管整齐限位架3均倾斜安装在上管支架1b侧面,二者的倾斜角度相等或不等。
70.进一步地,管定心传送结构1c包括管定心传送滚轮7、管定心支架8和管挡板9;管定心支架8有多个,多个管定心支架8间隔安装在上管支架1b上;
71.管定心支架8上安装多个管定心传送滚轮7,多个管定心传送滚轮7在管定心支架8上设置呈v型结构,管定心传送滚轮7与待装长管5相切,对待装长管5进行定心,保证待装长管5稳定传送;管定心传送滚轮7的滚动方向与待装长管5的运动方向一致,用于减小待装长管5与管定心支架8的摩擦力,辅助运送待装长管5;
72.管挡板9竖直安装在管定心支架8上、且位于管定心支架8外侧,对待装长管5进行定位,防止滚落至定心支架8上的待装长管5从定心支架8外侧滚出;管挡板9呈间隔设置,即相邻设置的部分定心支架上设置管挡板9,对待装长管5(即原料长管)进行定位,确保待装长管5落入多个管定心传送滚轮7形成的v型结构中,且节省成本。
73.进一步地,切管结构1d包括防跳动压轮装置14、刀片动力电机16、切刀动力电机18和切刀导轨19和切管支架;刀片t1与刀片动力电机16连接;切管支架固定安装在上管支架1b上;防跳动压轮装置14、切刀动力电机18和切刀导轨19均安装在切管支架上;切刀动力电
机18通过动力链条与切刀滑块t2连接,驱动切刀滑块t2沿着切刀导轨19运动,控制刀片t1前后滑行,从而控制刀片t1的切割深度;刀片动力电机16和刀片t1均安装在切刀滑块t2上,切刀滑块t2与切刀导轨19滑动连接;在待装长管5被防跳动压轮装置14定位后,待装长管5处于旋转状态,切刀动力电机18驱动切刀滑块t2沿切刀导轨19运动,带动刀片t1运动,同时刀片动力电机16驱动刀片t1切管;
74.防跳动压轮装置14包括防跳动架14.1、管定心旋转滚轮结构14.2、管旋转压轮结构14.3和压轮驱动气缸14.4;管定心旋转滚轮结构14.2安装在防跳动架14.1下端;管定心旋转滚轮结构14.2包括管定心旋转滚轮支架14.21和管定心旋转滚轮14.22;
75.管定心旋转滚轮支架14.21上安装多个管定心旋转滚轮14.22,多个管定心旋转滚轮14.22在管定心旋转滚轮支架14.21上设置呈v型结构;
76.管定心旋转滚轮支架14.21与管定心支架8呈平行间隔设置、且高度相等;
77.管定心旋转滚轮14.22与管定心传送滚轮7高度相等;管定心旋转滚轮14.22的滚动方向与待装长管5的旋转方向相同,辅助带动待装长管5旋转;管定心旋转滚轮14.22与待装长管5相切,对待装长管5进行定心,提高操作稳定性;
78.管旋转压轮结构14.3活动安装在防跳动架14.1上部、且位于管定心旋转滚轮结构14.2上方;管旋转压轮结构14.3包括管旋转压轮支架14.31和管旋转压轮14.32;管旋转压轮14.32安装在管旋转压轮支架14.31下端;管旋转压轮14.32与待装长管5相切,对待装长管5进行定心,提高操作稳定性;
79.管旋转压轮支架14.31与防跳动架14.1活动连接;压轮驱动气缸14.4安装在管旋转压轮支架14.31上,驱动管旋转压轮支架14.31和管旋转压轮14.32沿着防跳动架14.1移动,当管旋转压轮14.32移动至压在待装长管5上端时,管旋转压轮14.32和管定心旋转滚轮14.22从上下两端定位待装长管5,通过对待装长管5进行定位,提高刀片t1的切管精度。
80.进一步地,管驱动结构1e包括减速电机10、齿条11、旋转气动卡盘12、旋转气动卡盘夹紧气缸13、旋转驱动电机15、管驱动导轨t3、管驱动滑块t4;管驱动导轨t3安装在上管支架1b端部;减速电机10通过齿轮与齿条11啮合,固定在上管支架1b上,管驱动滑块t4通过齿轮传动,从而推动管驱动结构1e移动;减速电机10、旋转气动卡盘12、旋转气动卡盘夹紧气缸13和旋转驱动电机15均安装在管驱动滑块t4上;
81.旋转气动卡盘夹紧气缸13与旋转气动卡盘12连接;旋转气动卡盘夹紧气缸13驱动旋转气动卡盘12松开或撑紧待装长管5的内壁;
82.旋转气动卡盘12与旋转驱动电机15通过皮带连接,旋转驱动电机15驱动旋转气动卡盘12带动待装长管5旋转,便于刀片t1切管;
83.减速电机10驱动管驱动滑块t4带动旋转气动卡盘12移动至旋转气动卡盘12的台阶面抵住待装长管5的固定端面、卡爪伸入待装长管5内孔中,通过旋转气动卡盘夹紧气缸13驱动旋转气动卡盘12从内侧撑紧待装长管5的固定端面;再通过减速电机10驱动管驱动滑块t4带动旋转气动卡盘12和待装长管5移动至固定位置(即通过管驱动结构1e撑住待装长管5内孔、且拖出待装长管5至预设切割长度),此时,刀片t1位于防跳动压轮装置14与旋转气动卡盘12之间(即预设切割长度的待装长管管段两端分别通过防跳动压轮装置14、旋转气动卡盘12固定),刀片t1沿着切管滑轨切割待装长管5、形成固定长度的管段t5,提高切割精度。
84.进一步地,车管部分x2包括衍架25、机械手17、车管支架26、卡爪座27和车管刀架结构20;卡爪座27用于固定管段t5,便于车管刀架结构20对管段t5进行车削;
85.卡爪座27和车管刀架结构20均安装在车管支架26上;车管支架26对卡爪座27和车管刀架结构20进行支撑;衍架25罩在车管支架26外周;机械手17安装在衍架25上端、且与衍架25活动连接;机械手17位于车管支架26上方。
86.进一步地,机械手17为三轴机械手;衍架25上端设置机械手横向导轨t6;机械手17与横向导轨t6活动连接,同时,机械手17上设置纵向和竖向导轨,保证机械手17可进行三轴运动,抓取和/或运送三维空间内任意点处的管段t5;
87.机械手17包括第一机械手17a和第二机械手17b;第一机械手17a、第二机械手17b分别与衍架25上的机械手横向导轨t6活动连接;
88.第一机械手17a上安装第一钳口21;根据设定程序,第一机械手17a横向向前移动至被旋转气动卡盘12固定的管段t5上方,竖向向下移动至第一机械手17a抓取管段t5、旋转气动卡盘夹紧气缸13驱动旋转气动卡盘12松开管段t5,第一机械手17a带着管段t5继续横向向前移动至将管段t5抽离旋转气动卡盘12,第一机械手17a竖向向上移动至管段t5位于卡爪座27侧上方、横向向后移动至管段t5位于卡爪座27上方、竖向向下移动至将管段t5运送至卡爪座27处、横向移动至管段t5伸入且抵住卡爪座27,卡爪座27卡紧管段t5,第一机械手17a回位至管驱动结构1e附近、进行下一个管段t5的抓取、运送操作;
89.第二机械手17b上安装铣钳一体结构22;铣钳一体结构22包括第二钳口t7和铣槽电动轴机构t8;第二钳口t7和铣槽电动轴机构t8连接呈一个整体结构;铣钳一体结构22与第二机械手17b之间安装铣钳旋转气缸t9;铣钳旋转气缸t9驱动铣钳一体结构22旋转,当需要对管段t5进行铣槽时,铣钳旋转气缸t9驱动铣钳一体结构22旋转至铣槽电动轴机构t8位于工作工位、对管段t5进行铣槽;当需要对管段t5进行抓取、运输时,铣钳旋转气缸t9驱动铣钳一体结构22旋转至第二钳口t7位于工作工位、对管段t5进行抓取、运输,本发明将二钳口t7和铣槽电动轴机构t8集成安装在第二机械手17b上,提高运行效率,节省成本。
90.进一步地,卡爪座27包括第一卡爪座27a和第二卡爪座27b;第一卡爪座27a固定安装在车管支架26一端;第二卡爪座27b与车管支架26活动连接;车管刀架结构20与车管支架26活动连接、且位于第一卡爪座27a与第二卡爪座27b之间。
91.车管支架26上设置三条导轨,分别为:第一导轨t11、第二导轨t12、第三导轨t13。
92.第二卡爪座27b通过第二导轨t12、第三导轨t13与车管支架26活动连接。
93.进一步地,第一卡爪座27a上设置外夹爪气动卡盘23;外夹爪气动卡盘23与外爪旋转电机t14连接;外爪旋转电机t14安装在车管支架26上;外爪旋转电机t14驱动外夹爪气动卡盘23旋转,从而带动管段t5旋转,便于车管刀架结构20对管段t5一端进行车削加工;第二卡爪座27b上设置内撑爪气动卡盘24;内撑爪气动卡盘24与内爪旋转电机t10连接;内爪旋转电机t10安装在第二卡爪座27b上;内爪旋转电机t10驱动内撑爪气动卡盘24旋转,从而带动管段t5旋转,便于车管刀架结构20对管段t5另一端进行车工;
94.外夹爪气动卡盘23套在管段t5一端外周,内撑爪气动卡盘24套在管段t5另一端内壁上,增加卡爪与管段t5的接触面积,减小管段t5的变形(管段t5一般为pvc管,易变形),提高加工精度;
95.当需要对管段t5一端面进行车工时,第一机械手17a上安装的第一钳口21将管段
t5运送至第一卡爪座27a的外夹爪气动卡盘23处,外夹爪气动卡盘23卡紧管段t5的一端,车管刀架结构20沿着车管支架26上的轨道移动至邻近第一卡爪座27a的预设加工位置,对管段t5一端面进行车工(即通过车管刀架结构20车管段t5一端面的内孔、内台阶及倒角);当需要对管段t5另一端面进行车工时,第二卡爪座27b沿着车管支架26上的导轨移动至邻近第一卡爪座27a的预设加工位置,内撑爪气动卡盘24撑紧管段t5的另一端、同时外夹爪气动卡盘23松开管段t5的一端,内撑爪气动卡盘24拖动管段t5至车管支架26尾部的加工工位;车管刀架结构20沿着车管支架26上的轨道移动至邻近第二卡爪座27b的预设加工位置,对管段t5另一面进行车工(即通过车管刀架结构20车管段t5另一端面的内孔、内台阶及倒角,并对管段t5的长度进行调整,提高管段的加工精度);当车管刀架结构20完成对整个管段t5的车工后,第二机械手17b通过铣钳一体结构22对车工后的管段t5进行铣槽,形成成品刷柄,铣钳一体结构22旋转180度,并抓取成品刷柄、运送至植毛部分x3的管架上,通过植毛部分x3对成品刷柄进行钻孔、植毛、剪毛操作。
96.进一步地,车管刀架结构20包括车刀20.1、刀架20.2、车管刀架支撑板20.4和刀架支撑板20.3;车刀20.1安装在刀架20.2上;刀架20.2安装在车管刀架支撑板20.4上;车管刀架支撑板20.4与刀架支撑板20.3纵向活动连接;刀架支撑板20.3与车管支架26横向活动连接;车刀20.1包括第一车刀20.11、第二车刀20.12、第三车刀20.13和第四车刀20.14;
97.刀架20.2包括电动刀架20.21和排刀架20.22;排刀架20.22有二个,其中一个排刀架20.22上安装第二车刀20.12,用于对固定在外夹爪气动卡盘23上的管段t5进行外夹爪气动卡盘23方向的内孔车削;另一个排刀架20.22上安装第四车刀20.14,用于对固定在内撑爪气动卡盘24上的管段t5进行内撑爪气动卡盘24方向的内孔车削;第二车刀20.12与第四车刀20.14的内孔车削方向相反,分别用于对管段5的两端面进行内孔车削;
98.电动刀架20.21上安装第一车刀20.11、第三车刀20.13;第一车刀20.11与第三车刀20.13呈平行间隔设置,且刀口方向相反,用于对管段5的两端面进行车削;电动刀架20.21上安装多个备用刀套20.23,根据使用情况安装备用刀具,进行车削操作。
99.车管刀架结构20在第一导轨t11、第二导轨t12、第三导轨t13上横向运动。刀架支撑板20.3通过第一导轨t11、第二导轨t12、第三导轨t13与车管支架26横向活动连接,满足车管刀架结构20横向及纵向的活动空间需求,保证车削工作的顺利进行,且在管段t5传送过程中退出车削工位、为外夹爪气动卡盘23与内撑爪气动卡盘24之间的管段t5传送留出足够空间。本发明还设置控制器,控制器与核心部件的传感器模块连接;核心部件包括储柄结构1a、上管支架1b、管定心传送结构1c、切管结构1d、管驱动结构1e、机械手17、车管刀架结构20、车管支架26、卡爪座27、植毛部分x3等。控制器与pc机连接,控制器将核心部件的传感器模块反馈的信号传送给pc机进行存储、打印。控制器通过通过无线通讯模块与移动终端(如,手机)连接,移动终端可以通过无线通讯模块直接控制控制器的启闭,从而控制本发明的启闭。
100.核心部件的传感器模块为位移传感器模块。核心部件的传感器模块将核心部件的工作位移情况反馈给pc机,pc机分析位移情况并传递工作信号(包括正常工作信号和报警信号)至移动终端上;一个移动终端可接收多台本发明的工作信号,实现一个人工控制5~10台甚至更多台本发明所述全自动生产线,劳动强度小、生产效率高、且大大节省人工。
101.植毛部分x3记载在申请人已申报的专利申请(申请号为:cn201910885850.7,专利
名称为《玻璃滚筒刷全自动生产一体机及其生产方法》)中。
102.进一步地,所述的手机玻璃滚筒刷智能机电三体化全自动生产线的生产方法,包括如下步骤:步骤一:机器启动;手机玻璃滚筒刷智能机电三体化全自动生产线启动;
103.步骤二:上管部分x1进行送管、切管操作;
104.送管操作:位于储柄结构1a运送工位上的待装长管5通过顶管板6顶起、在顶板6斜面和待装长管5的重力作用下将待装长管5安装在多个管定心传送滚轮7形成的v型结构中;管驱动结构1e的旋转气动卡盘12伸入待装长管5一端的内孔,固定、并拖出待装长管5,同时管定心传送滚轮7滚动,与管驱动结构1e一起运送待装长管5至下一个加工工位,此时,待装长管5位于防跳动压轮装置14中部;
105.切管操作:防跳动压轮装置14压紧待装长管5长管的管身,旋转驱动电机15带动待装长管5保持旋转状态,刀片t1在刀片动力电机16和切刀动力电机18的驱动下切割待装长管5成设定长度的管段t5;此时,旋转气动卡盘12向后移动,拖出管段t5;
106.步骤三:车管部分x2进行运送管段t5、车管的操作;
107.第一次运送管段及车管操作:第一机械手17在衍架25上横向运动至管段t5上方,再进行竖向移动至管段t5处,第一钳口21松开、套住管段t5、并夹紧,第一机械手17依次进行竖向向上、横向及竖向向下移动,将管段t5运送至第一卡爪座27a处,第一卡爪座27a上的外夹爪气动卡盘23夹紧管段t5一端,车管刀架结构20横向移动至邻近第一卡爪座27a的预设加工位置,通过第一车刀20.11车削管段t5一端面,车刀20.1纵向移动使第二车刀20.12位于加工工位、继续车削管段t5内孔、形成内孔及倒圆角结构;在车削管段t5的过程中,管段t5处于旋转状态;
108.第二次运送管段及车管操作:车管刀架结构20纵向移动、退出加工工位,留出管段t5传送空间,第二卡爪座27b横向移动至邻近第一卡爪座27a的预设加工位置,通过内撑爪气动卡盘24撑紧管段t5在上一步加工的管段t5车削内孔、此时外夹爪气动卡盘23松开管段t5,第二卡爪座27b横向移动带动管段t5退回加工工位;车管刀架结构20横向移动至邻近第二卡爪座27b的预设加工位置,通过第三车刀20.13车削管段t5另一端面以及向后车管段t5的全部外缘,车刀20.1纵向移动使第四车刀20.14位于加工工位、继续车削管段t5、形成内孔及倒圆角结构;在车削管段t5的过程中,管段t5处于旋转状态;
109.铣槽及第三次运送管段;第二机械手17b在衍架25上横向、竖向运动,带动铣钳一体结构22移动至铣槽工位,铣槽电动轴机构t8对固定在内撑爪气动卡盘24上的管段t5进行铣槽操作,形成成品刷柄t15;铣钳旋转气缸t9驱动铣钳一体结构22旋转180度,使铣槽电动轴机构t8与第二钳口t7换位,使第二钳口t7位于夹持工位,夹紧成品刷柄t15、此时内撑爪气动卡盘24松开成品刷柄t15,第二机械手17b横向向左移动、拖出成品刷柄t15,然后在衍架25上依次进行竖向向上、横向向右、竖向向下运动,将成品刷柄t15自动送至植毛部分x3处;
110.步骤四:植毛部分x3进行钻孔、植毛机剪毛操作;
111.植毛部分x3对位于其上的成品刷柄进行钻孔、植毛机剪毛操作,形成成品刷。其它未说明的部分均属于现有技术。