1.本实用新型涉及机器人自动化集成应用技术领域,尤其涉及一种机器人末端工具自定心取放装置。
背景技术:
2.随着机器人自动化集成应用越来越广泛,机器人末端会根据不同需求配置多种工具,这些工具会在不同使用场景下随机器人一起移动,在工具放置不稳的情况下会造成工具的偏移,这种情况下,无法保证机器人能够自动无障碍快速取放更换工具。为了满足机器人自动更换工具需求,需要设计一种机器人末端工具自定心取放装置,满足以下这些功能需求,需要限制工具大幅度位置偏移,能够在工具出现微动偏移的情况下自动定心回位,能够自动开合盖体便于机器人自动取放工具,也便于人工轻松取放工具,并且此装置需具备一定的密封性,能够防止外界环境中的粉尘和水等因素对工具造成使用影响。
技术实现要素:
3.有鉴于此,为了满足机器人自动更换末端工具的需求,本实用新型的实施例提供了一种机器人末端工具自定心取放装置。
4.本实用新型的实施例提供一种机器人末端工具自定心取放装置,包括:
5.容置箱体,其包括上端开口的下箱体、以及与所述下箱体上端口铰接的上箱盖;
6.设置于所述下箱体内的驱动机构,所述驱动机构输出端连接所述上箱盖,所述上箱盖受所述驱动机构驱动以与所述下箱体上端口盖合和翻转打开;
7.以及设置于所述下箱体内的至少一定心支撑机构,所述定心支撑机构固定于所述下箱体底部的底板、以及固定于所述底板上的多个支撑杆,所述支撑杆的上端设有支撑槽,放入所述下箱体内的机器人末端工具上部分别支撑于各所述支撑槽内。
8.进一步地,所述支撑槽为v形槽,各所述支撑槽的延长线经过机器人末端工具的重心。
9.进一步地,所述驱动机构包括两气缸,两所述气缸分别是设置于所述下箱体两端内侧,每一所述气缸固定于所述下箱体底部,且输出端朝上设置连接所述上箱盖的内部。
10.进一步地,所述上箱盖的下表面设有l形连接件,所述气缸输出端连接所述l形连接件。
11.进一步地,所述下箱体端部设有供线路通过的过线板、以及贯穿设置的气管接头。
12.进一步地,所述上箱盖相对所述下箱体上端口转动最大角度为90
°
。
13.进一步地,所述上箱盖后侧与所述下箱体上端口后侧之间设有多个缓冲限位器。
14.进一步地,所述下箱体上端口边缘设有缓冲橡胶垫。
15.进一步地,所述下箱体外壁设有多个拉手。
16.进一步地,所述下箱体的后侧面设有可拆卸连接的密封板。
17.本实用新型的实施例提供的技术方案带来的有益效果是:本实用新型的一种机器
人末端工具自定心取放装置,通过支撑槽支撑机器人末端工具,能够限制工具大幅度移动,在跟随机器人一起移动时出现微动偏差的情况下能够自动定心回位;容置箱体自动开合供机器人末端工具取放,且起到密封防护作用,防止粉尘水等因素影响机器人末端工具使用。
附图说明
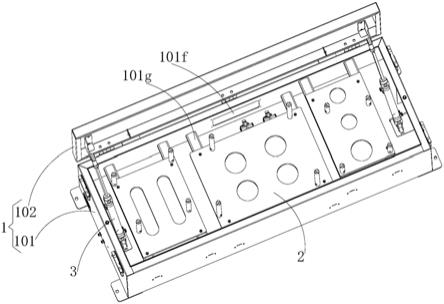
18.图1是本实用新型一种机器人末端工具自定心取放装置的立体图;
19.图2是本实用新型一种机器人末端工具自定心取放装置的左视图;
20.图3是图1中定心支撑机构2的示意图;
21.图4是图3中a处的局部放大图;
22.图5是各支撑槽的布置示意图;
23.图6是定心支撑机构支撑机器人末端工具的示意图;
24.图7是本实用新型一种机器人末端工具自定心取放装置放入机器人末端工具后的立体图。
25.图中:1-容置箱体、101-下箱体、101a-缓冲安装件、101b-过线板、101c-气管接头、101d-缓冲橡胶垫、101e-拉手、102-上箱盖、102a-缓冲限位件、102b-l形连接件、2-定心支撑机构、201-底板、202-支撑杆、202a-支撑槽、3-气缸、4-机器人末端工具。
具体实施方式
26.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型实施方式作进一步地描述。
27.请参考图1和2,本实用新型的实施例提供了一种机器人末端工具自定心取放装置,包括容置箱体1、驱动机构及至少一定心支撑机构2。
28.其中所述容置箱体1包括上端开口的下箱体101、以及与所述下箱体101上端口铰接的上箱盖102。具体的所述下箱体为101矩形箱体,所述上箱盖102同样为矩形。所述上箱盖102下部后侧与所述下箱体101上端口边缘后侧通过多个铰链连接,以使所述上箱盖102可转动,以与所述下箱体101上端口盖合或翻转打开。
29.所述驱动机构输出端连接所述上箱盖102,所述上箱盖102受所述驱动机构驱动而转动。这里所述驱动机构包括两气缸3,两所述气缸3分别是设置于所述下箱体101两端内侧,每一所述气缸3固定于所述下箱体101底部,且输出端朝上设置连接所述上箱盖102的内部。所述上箱盖102的下表面设有l形的连接件102b,所述l形连接件102b一侧与所述上箱盖102下表面贴合并固定连接,另一侧连接所述气缸3输出端。
30.请参考图2,另外所述下箱体102端部设有过线板101b、以及贯穿设置的气管接头101c。所述过线板101b供线路通过,外部气管通过所述气管接头101c连接所述气缸3。这里气源通过所述外部气管连接空气压缩机,通过空气压缩机对所述气缸3缸筒进行供气,以使其输出端伸长,进而驱动所述上箱盖102转动。
31.优选的,所述上箱盖102相对所述下箱体101上端口转动最大角度为90
°
。所述上箱盖102后侧与所述下箱体101上端口后侧之间设有多个缓冲限位器。所述缓冲限位器由缓冲限位件102a和缓冲安装件101a组成,所述缓冲限位件102a安装于所述上箱盖102后侧,所述缓冲安装件101a安装于所述下箱体101上端口后侧,通过所述缓冲限位件102a与所述缓冲
安装件101a配合,限制所述上箱盖102打开角度。
32.此外,所述下箱体101上端口边缘设有缓冲橡胶垫101d。在所述上箱盖102与所述下箱体101上端口盖合时,吸收与所述上箱盖102动能,起到缓冲作用,还可使所述上箱盖102与所述下箱体101紧密盖合,防止粉尘、水等进入所述容置箱体1。
33.所述下箱体101外壁设有多个拉手101e,这里所述拉手101e分别设置于所述下箱体101两端,这样使便于该机器人末端工具自定心取放装置搬运移动。所述下箱体101的后侧面设有开口、以及可拆卸连接的密封板101f,所述密封板101f封堵所述开口,所述开口供检修、维护、接线备用。
34.请参考图1、3和4,所述定心支撑机构2可以设置为多个,一般根据机器人末端配置的工具数量决定,分别设置于所述下箱体101内,每一所述定心支撑机构2用以支撑固定一机器人末端工具4。
35.所述定心支撑机构2固定于所述下箱体101底部的底板201、以及固定于所述底板201上的多个支撑杆202。这里所述下箱体101底部设有多根支撑梁101g作为安装件,所述底板201支撑于各所述支撑梁101g上并与所述支撑梁101g通过紧固螺栓固定连接。
36.请参考图5,所述底板201为矩形板,各所述支撑杆202垂直设置于所述底板201的边缘。所述支撑杆202的上端设有支撑槽202a,所述支撑槽202a优选为v形槽,各所述支撑槽202a的延长线经过机器人末端工具4的重心。
37.请参考图6和7,放入所述下箱体内的机器人末端工具4上部分别支撑于各所述支撑槽202a内,具体而言机器人末端工具4的外围设有多个支架,各所述支架分别坐于所述支撑槽202a内被限位支撑。这样机器人末端工具4放置在所述定心支撑机构2上后,能够限制机器人末端工具4大幅度移动,在出现微动偏差的情况下能够自动定心回位。
38.在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本技术请求保护的范围。
39.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
40.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。