一种医废垃圾桶u型agv搬运机器人
技术领域
1.本实用新型属于垃圾处理技术领域,尤其涉及医疗废弃物的处理,具体是一种医废垃圾桶u型agv搬运机器人。
背景技术:
2.医疗废弃物是指医疗卫生机构在医疗、预防、保健以及其他相关活动中产生的具有直接或者间接感染性、毒性以及其他危害性的废物,是一种典型的危险废物,包括感染性废物、病理性废物、损伤性废物、药物性废物和化学性废物,都具有相当大的危险,需要尽量避开人手接触。
3.医疗废弃物在装袋盛桶后,再集中搬运到后续的处理工艺流程中,由于医疗废弃物的特殊性,无法采用垃圾搬运车倾倒入车来搬运,需要将垃圾连桶一起搬运。现有的搬运手段大多采用人工搬运配合小型叉车运输,不仅工作强度高,搬运成本高,还容易发生倾倒的意外,搬运过程中存在接触与感染的风险,这都严重影响医疗废弃物的处理要求,也对相应的工作人员的身心健康带来较大的威胁。
4.因此,现有技术中需要一种新的能够脱离人工的话无人化的处理方案,来代替传统的人工搬运装卸。
技术实现要素:
5.为了解决现有技术的不足,本实用新型提出一种医废垃圾桶u型agv搬运机器人,来代替传统人工搬运装卸。
6.本实用新型要解决的技术问题是通过以下技术方案实现的:
7.一种医废垃圾桶u型agv搬运机器人,包括机体和底盘,机体整体俯视呈u型,机体的后侧设置配合搬运医废垃圾桶的搬运缺口,搬运缺口内相对的两侧均设置有升降机构,升降机构包括抬升臂,抬升臂沿侧壁垂直方向自由移动,底盘包括设置在机体底部的行走轮和配合行走轮的驱动系统,行走轮包括两个驱动轮和一个万向轮,驱动轮对称设置在机体的搬运缺口两侧的底部,万向轮设置在机体底部的另一侧,与两个驱动轮距离一致。
8.在本实用新型中,所述抬升臂的行程最低点低于医废垃圾桶的夹持点的高度。
9.在本实用新型中,所述机体的下部设置有导航避障机构,包括防撞开关和位于机体前侧的激光导航传感器,机体设置有控制中心,控制中心分别与导航避障机构和驱动系统相连通。
10.进一步的,所述防撞开关分别设置在机体的前侧和左右两侧,激光导航传感器设置在防撞开关的上方或下方。
11.在本实用新型中,所述机体内置充电电池,机体的下部设置有充电刷板,充电刷板设置在相邻的防撞开关之间,相对应的,本实用新型的活动区域设置有充电区域,充电区域设置有与充电刷板相配合的充电座,充电座吸附充电刷板进行充电。
12.在本实用新型中,所述驱动系统包括设置在机体下部的伺服电机和减速机,每个
驱动轮与一组伺服电机和减速机配合,两个驱动轮配合来实现机体的移动和转向。
13.在本实用新型中,所述抬升臂的上端设置为托架,两侧托架夹持承托起医废垃圾桶,抬升臂的下端连接电缸,电缸内置在搬运缺口的左右侧壁内。
14.与现有技术相比,本实用新型结构新颖,构思巧妙,通过将agv小车与搬运医废垃圾桶的升降机构进行结合,将医废垃圾桶搬运时的重心调整到agv搬运机器人的中心,使得agv搬运机器人能够稳定的进行搬运,同时导航避障机构和驱动系统的配合,使得agv搬运机器人能够有效的脱离人手,自动运行,具有高效率、无人化、智能化等优点。
附图说明
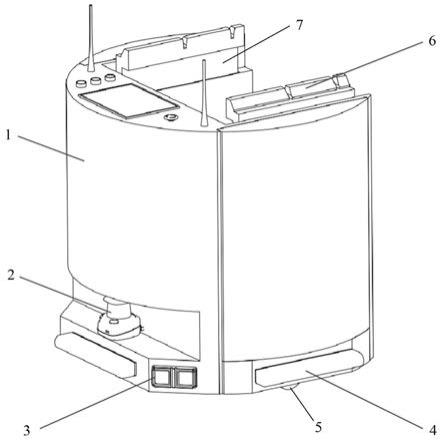
15.图1 为本实用新型的结构示意图;
16.图2 为本实用新型另一视角的结构示意图。
17.图中:机体1、激光导航传感器2、充电刷板3、防撞开关4、行走轮5、托架6、抬升臂7。
具体实施方式
18.以下结合说明书附图和具体优选的实施例对本实用新型作进一步描述,但并不因此而限制本实用新型的保护范围。
19.一种医废垃圾桶u型agv搬运机器人,如图1和2所示,包括机体1和底盘,机体1整体俯视呈u型,机体1的后侧设置配合搬运医废垃圾桶的搬运缺口,搬运缺口内相对的两侧均设置有升降机构,升降机构包括抬升臂7,抬升臂7沿侧壁垂直方向自由移动,抬升臂7的行程最低点低于医废垃圾桶的夹持点的高度,抬升臂7的上端设置为托架6,两侧托架6夹持承托起医废垃圾桶,抬升臂7的下端连接电缸,电缸内置在搬运缺口的左右侧壁内;底盘包括设置在机体1底部的行走轮5和配合行走轮5的驱动系统,行走轮5包括两个驱动轮和一个万向轮,驱动轮对称设置在机体1的搬运缺口两侧的底部,万向轮设置在车体底部的另一侧,与两个驱动轮距离一致,驱动系统包括设置在机体1下部的伺服电机和减速机,每个驱动轮与一个伺服电机和减速机配合,两个驱动轮配合来实现机体1的移动和转向。
20.机体1的下部设置有导航避障机构,包括防撞开关4和位于机体1前侧的激光导航传感器2,防撞开关4分别设置在机体1的前侧和左右两侧,激光导航传感器2设置在机体1前侧的防撞开关4的上方,机体1设置有控制中心,控制中心分别与导航避障机构和驱动系统相连通;机体1内置充电电池,机体1的下部设置有充电刷板3,充电刷板3设置在相邻的防撞开关4之间,相对应的,本实用新型所述的医废垃圾桶u型agv搬运机器人的活动区域设置有充电区域,充电区域设置有与充电刷板3相配合的充电座,充电座吸附充电刷板3进行充电。
21.本实用新型应用于医废垃圾桶的搬运时,自主移动到医废垃圾桶的存储区域,抬升臂7下沉,托架6托在医废垃圾桶的桶沿凹槽处,在电缸的带动下,抬升臂7提升带动医废垃圾桶提升,然后agv搬运机器人将医废垃圾桶向目标位置搬运,驱动轮同速行走时,机体1向前移动,驱动轮差速行走时,机体1转向,在行走路径上遇到障碍物时,激光导航传感器2识别障碍物并使得agv搬运机器人减速、停止,若在一定的时间,障碍物离开agv搬运机器人的防护范围,则agv搬运机器人将自动启动,继续执行任务;若超过预设时间,安全防护仍处于触发状态,则系统将触发长时间停车报警,需人工确认才可继续执行任务,确保生产作业安全稳定运行。在电池电量不足时,会自动发送系统充电指令,agv搬运机器人驶向充电区
域,充电刷板3碰撞吸附充电座进行充电,充电完成后充电刷板3脱离充电座,继续工作或待命。
22.因此,结合上述构造和工作过程可以发现,本实用新型所述的医废垃圾桶u型agv搬运机器人结构新颖,构思巧妙,自动化程度高,具有高效率、无人化、智能化等优点。
技术特征:
1.一种医废垃圾桶u型agv搬运机器人,其特征在于:包括机体和底盘,机体整体俯视呈u型,机体的后侧设置配合搬运医废垃圾桶的搬运缺口,搬运缺口内相对的两侧均设置有升降机构,升降机构包括抬升臂,抬升臂沿侧壁垂直方向自由移动,底盘包括设置在机体底部的行走轮和配合行走轮的驱动系统。2.根据权利要求1所述的医废垃圾桶u型agv搬运机器人,其特征在于:所述抬升臂的行程最低点低于医废垃圾桶的夹持点的高度。3.根据权利要求1所述的医废垃圾桶u型agv搬运机器人,其特征在于:所述机体的下部设置有导航避障机构,包括防撞开关和位于机体前侧的激光导航传感器,机体设置有控制中心,控制中心分别与导航避障机构和驱动系统相连通。4.根据权利要求3所述的医废垃圾桶u型agv搬运机器人,其特征在于:所述防撞开关分别设置在机体的前侧和左右两侧,激光导航传感器设置在防撞开关的上方或下方。5.根据权利要求1所述的医废垃圾桶u型agv搬运机器人,其特征在于:所述机体内置充电电池,机体的下部设置有充电刷板,充电刷板设置在相邻的防撞开关之间。6.根据权利要求1所述的医废垃圾桶u型agv搬运机器人,其特征在于:所述抬升臂的上端设置为托架,两侧托架夹持承托起医废垃圾桶,抬升臂的下端连接电缸,电缸内置在搬运缺口的左右侧壁内。7.根据权利要求1所述的医废垃圾桶u型agv搬运机器人,其特征在于:所述行走轮包括两个驱动轮和一个万向轮,驱动轮对称设置在机体的搬运缺口两侧的底部,万向轮设置在机体底部的另一侧,与两个驱动轮距离一致。8.根据权利要求1所述的医废垃圾桶u型agv搬运机器人,其特征在于:所述驱动系统包括设置在机体下部的伺服电机和减速机,每个驱动轮与一组伺服电机和减速机配合。
技术总结
一种医废垃圾桶U型AGV搬运机器人,属于垃圾处技术领域,包括机体和底盘,机体整体俯视呈U型,机体的后侧设置配合搬运医废垃圾桶的搬运缺口,搬运缺口内相对的两侧均设置有升降机构,升降机构包括抬升臂,抬升臂沿侧壁垂直方向自由移动,抬升臂的行程最低点低于医废垃圾桶的夹持点的高度,底盘包括设置在机体底部的行走轮和配合行走轮的驱动系统。本实用新型结构新颖,构思巧妙,自动化程度高,具有高效率、无人化、智能化等优点。智能化等优点。智能化等优点。
技术研发人员:王书华 李磊
受保护的技术使用者:上海道简机电科技有限公司
技术研发日:2021.08.27
技术公布日:2022/1/21