1.本实用新型属于家用机器人领域,尤其涉及一种玻璃清洗机器人。
背景技术:
2.随扫地机器人功能的逐渐完善,在小型化的前提下,可以良好的完成清扫、吸尘和擦地等工作,足以应付现有地面各种问题。
3.但是现有扫地机器人仅能处理平面,而无法处理立面,而家庭清扫中玻璃窗的清洗,尤为麻烦。
技术实现要素:
4.为解决背景技术中提及的扫体机器人无法清洗玻璃,本实用新型提供一种玻璃清洗机器人,在现有的扫地机器人的基础上,增设辅助组件,使扫地机器人可以清洗玻璃。
5.为实现上述目的,本实用新型的玻璃清洗机器人的具体技术方案如下:
6.一种玻璃清洗机器人,包括可移动的主体,以及吸附装置;吸附装置和主体分别位于在玻璃两侧,吸附装置磁性吸附磁性部,通过摩擦力使主体攀爬在玻璃上,吸附装置随主体移动;机器人还包括对齐传感器,对齐传感器检测吸附装置随动情况。
7.进一步的,主体底面设有磁性部,磁性部包括对称设置的正磁体和负磁体。
8.进一步的,吸附装置包括第一电磁铁和第二电磁铁,第一电磁铁吸附正磁体,第二电磁铁吸附负磁体。
9.进一步的,正磁体和负磁体均呈弧形,且正磁体和负磁体同轴设置。
10.进一步的,对齐传感器包括红外发射极和红外接收极,使红外发射极和红外接收极之间形成穿过玻璃的光路。
11.进一步的,红外发射极固定在主体底面上,红外接收极可移动设置在磁性吸附装置底面。
12.进一步的,主体滑移连接有沿横向滑移的横向滑台,横向滑台上滑移连接有沿纵向滑移的纵向滑台,红外接收极固定在纵向滑台上。
13.进一步的,纵向滑台一端形成延伸板,延伸板延伸至吸附装置底部外。
14.进一步的,主体一侧形成有限位套筒,延伸板贯穿限位套筒,限位套筒和延伸板紧固螺钉连接。
15.进一步的,还包括报警装置;当光路断开,报警装置报警。
16.本实用新型的玻璃清洗机器人具有以下优点:
17.1、通过增设吸附装置等配件,使现有的扫地机器人具有清洗功能;
18.2、通过磁性吸附,提供足够的摩擦力,从而使玻璃对主体的摩擦力克服主体的重力,玻璃对吸附装置的摩擦力克服吸附装置的重力,使整个玻璃清洗机器人攀爬在玻璃上,从而随主体移动对玻璃进行清洗;
19.3、通过对齐传感器产生的光路,保证主体和吸附装置对齐,防止主体脱离吸附装
置产生的磁场,而脱落。
附图说明
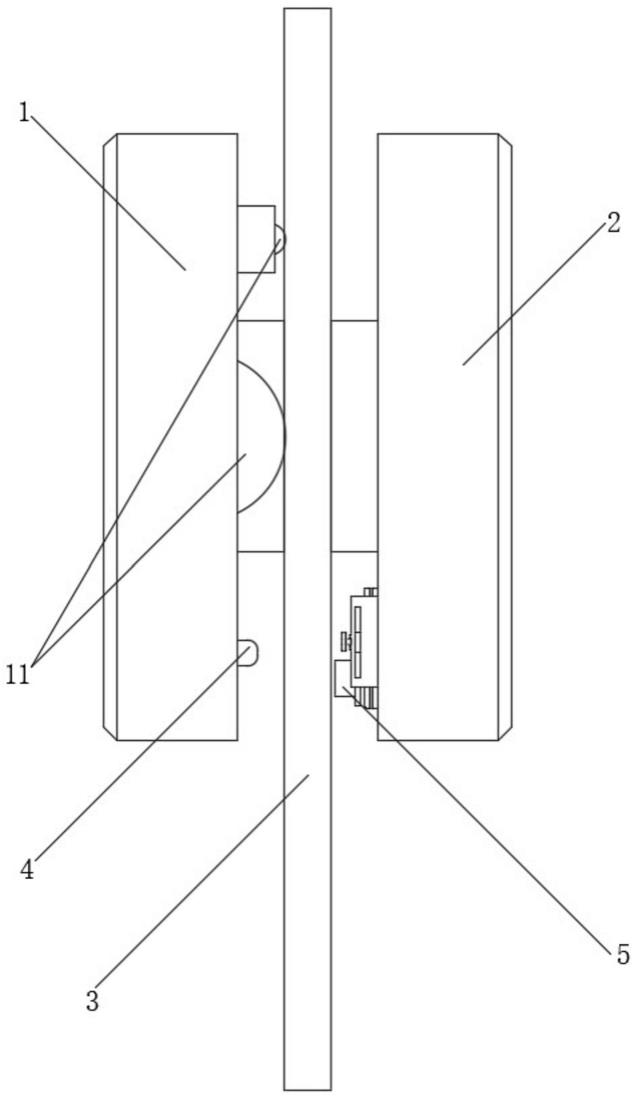
20.图1为本实用新型的玻璃清洗机器人侧视图;
21.图2为本实用新型的玻璃清洗机器人结构示意图;
22.图3为本实用新型的主体结构示意图;
23.图4为本实用新型的吸附装置结构示意图。
24.图中标记说明:
25.1、主体;11、脚轮;12、正磁体;13、负磁体;2、吸附装置;21、第一电磁铁;22、第二电磁铁;3、玻璃;4、红外发射极;5、红外接收极;6、横向滑台;7、纵向滑台;71、延伸板;8、限位套筒。
具体实施方式
26.为了更好地了解本实用新型的目的、结构及功能,下面结合附图,对本实用新型一种玻璃清洗机器人做进一步详细的描述。
27.如图1和图2所示,本实用新型的玻璃清洗机器人,包括可移动的主体1,主体1底面设有脚轮11,以实现移动。而且主体1上还设有清扫组件,比如吸尘组件、抹布等等,从而进行清洗。主体1即现有技术中扫地机器人,以扁圆柱形较为常见,本实施例不再描述。
28.如图3和图4所示,为了使主体1立在玻璃3上,主体1底面设有磁性部,机器人还包括吸附装置2,吸附装置2和主体1分别位于在玻璃3两侧,吸附装置2磁性吸附磁性部,通过摩擦力使主体1攀爬在玻璃3上,且吸附装置2随主体1移动;机器人还包括对齐传感器,对齐传感器检测吸附装置2随动情况,防止主体1和吸附装置2错位,而导致吸引力减少,而导致主体1跌落。
29.具体讲,磁性部包括对称设置的正磁体12和负磁体13,正磁极、反磁极分别为两个永磁体;其中正磁体12背面固定在主体1底面,使正面的正磁极贴合玻璃3以供吸附装置2吸附;而负磁体13正面固定在主体1底面,使背面的负刺激贴合玻璃3以供吸附装置2吸附。
30.相应的,吸附装置2包括第一电磁铁21和第二电磁铁22,第一电磁铁21与正磁体12相适配并吸附正磁体12,第二电磁铁22和负磁体13相适配并吸附负磁体13。正磁体12和负磁体13均呈弧形,且正磁体12和负磁体13同轴设置,当吸附装置2和主体1错位,相邻磁场的相斥,使吸附装置2具有一定的纠错能力。
31.对齐传感器包括红外发射极4和红外接收极5,红外发射极4固定在主体1底面上,红外接收极5可移动设置在磁性吸附装置2底面;通过红外接收极5移动,使红外发射极4和红外接收极5之间形成穿过玻璃3的光路。
32.为了移动红外接收极5,主体1滑移连接有沿横向滑移的横向滑台6,横向滑台6上滑移连接有沿纵向滑移的纵向滑台7,红外接收极5极固定在纵向滑台7上。
33.具体讲,横向和纵向为相互垂直的两个方向即可。主体1上设有沿横向设置的导轨,横向滑台6滑移连接在导轨上。而纵向滑台7开有沿纵向设置的一字孔,横向滑台6上设有贯穿一字孔的螺栓,从而纵向滑台7沿纵向滑移。
34.为了便于调节,纵向滑台7一端形成延伸板71,延伸板71延伸至吸附装置2底部外;
从而通过用手拨动延伸板71,调节红外接收极5的位置。而且主体1一侧形成有限位套筒8,延伸板71贯穿限位套筒8,限位套筒8和延伸板71紧固螺钉连接。具体讲,限位套筒8螺纹连接有螺钉,螺钉贯穿8贯穿限位套筒8并与延伸板71抵接。从而在调节红外接收极5后,固定红外接收极5相对红外发射极4的位置。
35.从而根据对齐传感器的检测数据,当发现主体1和吸附装置2发生错位,即光路断开时,可以通过设置蜂鸣器作为报警装置,并暂停主体1的移动。通过手动推动吸附装置2位置,保证吸附装置2和主体1对齐,进而防止两者错位而跌落。
36.可以理解,本实用新型是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本实用新型的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本实用新型的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本实用新型的精神和范围。因此,本实用新型不受此处所公开的具体实施例的限制,所有落入本申请的权利要求范围内的实施例都属于本实用新型所保护的范围内。
技术特征:
1.一种玻璃清洗机器人,其特征在于,包括可移动的主体(1),以及吸附装置(2);吸附装置(2)和主体(1)分别位于在玻璃(3)两侧,吸附装置(2)磁性吸附磁性部,通过摩擦力使主体(1)攀爬在玻璃(3)上,吸附装置(2)随主体(1)移动;机器人还包括对齐传感器,对齐传感器检测吸附装置(2)随动情况。2.根据权利要求1所述的玻璃清洗机器人,其特征在于,主体(1)底面设有磁性部,磁性部包括对称设置的正磁体(12)和负磁体(13)。3.根据权利要求2所述的玻璃清洗机器人,其特征在于,吸附装置(2)包括第一电磁铁(21)和第二电磁铁(22),第一电磁铁(21)吸附正磁体(12),第二电磁铁(22)吸附负磁体(13)。4.根据权利要求3所述的玻璃清洗机器人,其特征在于,正磁体(12)和负磁体(13)均呈弧形,且正磁体(12)和负磁体(13)同轴设置。5.根据权利要求1所述的玻璃清洗机器人,其特征在于,对齐传感器包括红外发射极(4)和红外接收极(5),使红外发射极(4)和红外接收极(5)之间形成穿过玻璃(3)的光路。6.根据权利要求5所述的玻璃清洗机器人,其特征在于,红外发射极(4)固定在主体(1)底面上,红外接收极(5)可移动设置在磁性吸附装置(2)底面。7.根据权利要求6所述的玻璃清洗机器人,其特征在于,主体(1)滑移连接有沿横向滑移的横向滑台(6),横向滑台(6)上滑移连接有沿纵向滑移的纵向滑台(7),红外接收极(5)固定在纵向滑台(7)上。8.根据权利要求7所述的玻璃清洗机器人,其特征在于,纵向滑台(7)一端形成延伸板(71),延伸板(71)延伸至吸附装置(2)底部外。9.根据权利要求8所述的玻璃清洗机器人,其特征在于,主体(1)一侧形成有限位套筒(8),延伸板(71)贯穿限位套筒(8),限位套筒(8)和延伸板(71)紧固螺钉连接。10.根据权利要求5所述的玻璃清洗机器人,其特征在于,还包括报警装置;当光路断开,报警装置报警。
技术总结
本实用新型公开了一种玻璃清洗机器人,包括可移动的主体,以及吸附装置;吸附装置和主体分别位于在玻璃两侧,吸附装置磁性吸附磁性部,通过摩擦力使主体攀爬在玻璃上,吸附装置随主体移动;机器人还包括对齐传感器,对齐传感器检测吸附装置随动情况。本实用新型所述的玻璃清洗机器人,通过磁性吸附,提供足够的摩擦力,使整个玻璃清洗机器人攀爬在玻璃上,从而随主体移动对玻璃进行清洗。而随主体移动对玻璃进行清洗。而随主体移动对玻璃进行清洗。
技术研发人员:潘可嘉
受保护的技术使用者:潘可嘉
技术研发日:2021.06.02
技术公布日:2022/1/21