1.本实用新型涉及机器人技术,特别涉及一种扫地机器人的集尘组件、以及应用该集尘组件的一种扫地机器人。
背景技术:
2.扫地机器人可以用于清洁地面,并且,扫地机器人可以配备有用于暂时贮存灰尘的集尘盒。并且,每当集尘盒积满灰尘、或者扫地机器人的清扫任务完成时,需要对集尘盒实施内部清理。
3.然而,由于集尘盒的内部被灰尘污染,因而在对集尘盒实施内部清理时,需要通过较为繁琐的清洗操作方可清理掉附着在集尘盒内部的积尘,不但清理效率低,而且用户体验差。
4.因此,如何简化对集尘盒的内部清理,成为现有技术中有待解决的技术问题。
技术实现要素:
5.在本实用新型的实施例中,提供了一种扫地机器人的集尘组件、以及应用该集尘组件的一种扫地机器人,有助于简化集尘盒的内部清理。
6.在其中一个实施例中,一种扫地机器人的集尘组件可以包括:
7.集尘盒,所述集尘盒具有集尘内腔,并且,所述集尘盒还具有与所述集尘内腔连通的内腔开口和通风盒壁;
8.活动盖,所述活动盖具有集尘风口,并且,所述活动盖还具有装袋机构;
9.其中,所述装袋机构用于可拆卸地装设可置换透气集尘袋,并使得所述可置换透气集尘袋的集尘袋口与所述集尘风口对接;
10.当所述活动盖在所述内腔开口处封闭所述集尘内腔时,所述可置换透气集尘袋位于所述集尘内腔的内部,以使得从所述集尘风口流向所述集尘内腔的内部的载尘气流从所述集尘袋口灌入至所述集尘袋,其中,所述载尘气流中的灰尘被收集在所述可置换透气集尘袋内,并且,从所述可置换透气集尘袋贯穿渗出的洁净气流通过所述通风盒壁流出至所述集尘盒之外;
11.当所述活动盖离开所述内腔开口以打开所述集尘内腔时,所述可置换透气集尘袋跟随于所述活动盖从所述内腔开口向所述集尘内腔的外部移动。
12.可选地,所述活动盖枢转装设于所述集尘盒,其中,所述活动盖通过相对于所述集尘盒的枢转而在封闭所述集尘内腔和打开所述集尘内腔的姿态之间切换。
13.可选地,进一步包括过滤器,所述过滤器装设在所述通风盒壁,以形成所述洁净气流从所述通风盒壁流出至所述集尘盒之外的过滤屏障。
14.可选地,所述可置换透气集尘袋包括硬质接口卡板、以及连接所述硬质接口卡板的软质透气袋体;其中,所述集尘袋口开设于所述硬质接口卡板;并且,所述软质透气袋体的袋腔与所述集尘袋口连通。
15.可选地,所述可置换透气集尘袋以所述软质透气袋体折叠贴靠于所述硬质接口卡板的扁平压缩形态装设于所述装袋机构;其中,所述软质透气袋体具有对所述载尘气流形成预设风阻的透气特性,以使得:折叠贴靠于所述硬质接口卡板的所述软质透气袋体响应于从所述集尘袋口灌入的所述载尘气流而在所述集尘内腔内扩张伸展。
16.可选地,所述装袋机构包括布置在所述集尘风口的相对两侧的插拔滑轨;所述硬质接口卡板通过与所述插拔滑轨的滑动配合实现所述可置换透气集尘袋在所述装袋机构的可拆卸装设。
17.可选地,所述装袋机构进一步包括环绕所述集尘风口布置的加强筋框;所述加强筋框将滑入至所述插拔滑轨的所述硬质接口卡板支撑为与所述活动盖的盖表面之间具有间隙,并且,所述加强筋框在所述间隙内形成所述集尘袋口与所述集尘风口之间的密闭气流通道。
18.可选地,所述插拔滑轨平行于所述活动盖的盖表面;所述活动盖的边缘处进一步布置有从所述盖表面凸起的加强筋缘;所述装袋机构进一步包括位于所述插拔滑轨的端部的滑轨扩口,以使所述硬质接口卡板以避让所述加强筋缘的倾斜姿态而通过所述滑轨扩口滑入所述插拔滑轨或从所述插拔滑轨脱离。
19.可选地,所述可置换透气集尘袋进一步包括从所述硬质接口卡板延伸的软质卡板耳带;其中,当所述硬质接口卡板以避让所述加强筋缘的倾斜姿态插入在所述滑轨扩口时,所述硬质接口卡板响应于所述软质卡板耳带受到的外部拉力,滑入至所述插拔滑轨中。
20.在另一个实施例中,扫地机器人可以包括移动底盘,以及,承载于移动底盘的抽吸组件、清扫组件、以及根据前述实施例所述的集尘组件,其中:
21.在所述移动底盘的可移动范围中的任意位置,所述抽吸组件驱动形成从所述清扫组件流向所述集尘组件的所述集尘风口的所述载尘气流。
22.基于上述实施例,集尘组件可以包括具有集尘内腔的集尘盒、以及用于封闭该集尘内腔的活动盖,其中,活动盖可以具有装袋机构,该装袋机构能够可拆卸地装设可置换透气集尘袋。当活动盖封闭集尘内腔时,可置换透气集尘袋可以位于集尘内腔中,并且,流向集尘内腔的载尘气流中的灰尘可以被收集在可置换透气集尘袋内,而不会污染集尘内腔;当活动盖打开集尘内腔时,可置换透气集尘袋可以跟随于活动盖向集尘内腔的外部移动,此时,只需将收集了灰尘的可置换透气集尘袋从装袋机构拆卸,即可实现对集尘盒的内部清理,而无需对集尘内腔实施清洗,从而简化了集尘盒的内部清理,既可以提高清理效率,又可以改善用户体验。
附图说明
23.以下附图仅对本实用新型做示意性说明和解释,并不限定本实用新型的范围:
24.图1为一个实施例中的集尘组件的分解状态示意图;
25.图2a和图2b为如图1所示的集尘组件的装配结构示意图;
26.图3为如图1所示的集尘组件使用的可置换透气集尘袋的结构示意图;
27.图4为如图1所示的集尘组件安装可置换透气集尘袋的原理示意图;
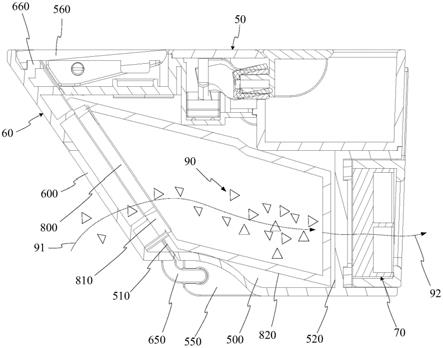
28.图5为如图1所示的集尘组件的工作状态示意图;
29.图6为如图1所示的集尘组件拆卸可置换透气集尘袋的原理示意图;
30.图7为如图1所示的集尘组件使用的可置换透气集尘袋的硬质接口卡板的结构示意图;
31.图8为如图1所示集尘组件为适配如图7所示接口板的装袋机构的优选结构示意图;
32.图9为如图1所示集尘组件在如图7所示装袋机构插装有如图7所示硬质接口卡板时的剖视图;
33.图10为另一个实施例中的扫地机器人的示例性结构示意图。
34.附图标记说明
35.10
ꢀꢀꢀꢀꢀꢀꢀ
滚刷罩壳
36.110
ꢀꢀꢀꢀꢀꢀ
罩壳内腔
37.130
ꢀꢀꢀꢀꢀꢀ
卷刷窗口
38.150
ꢀꢀꢀꢀꢀꢀ
抽吸风口
39.30
ꢀꢀꢀꢀꢀꢀꢀ
旋转滚刷
40.310
ꢀꢀꢀꢀꢀꢀ
滚刷转轴
41.330
ꢀꢀꢀꢀꢀꢀ
滚刷刷扇
42.50
ꢀꢀꢀꢀꢀꢀꢀ
集尘盒
43.500
ꢀꢀꢀꢀꢀꢀ
集尘内腔
44.510
ꢀꢀꢀꢀꢀꢀ
内腔开口
45.520
ꢀꢀꢀꢀꢀꢀ
通风盒壁
46.550
ꢀꢀꢀꢀꢀꢀ
枢转支架
47.560
ꢀꢀꢀꢀꢀꢀ
闭合卡扣
48.60
ꢀꢀꢀꢀꢀꢀꢀ
活动盖
49.600
ꢀꢀꢀꢀꢀꢀ
集尘风口
50.610
ꢀꢀꢀꢀꢀꢀ
装袋机构
51.611
ꢀꢀꢀꢀꢀꢀ
插拔滑轨
52.612
ꢀꢀꢀꢀꢀꢀ
滑轨扩口
53.613
ꢀꢀꢀꢀꢀꢀ
加强筋框
54.650
ꢀꢀꢀꢀꢀꢀ
枢转支腿
55.660
ꢀꢀꢀꢀꢀꢀ
闭合卡槽
56.670
ꢀꢀꢀꢀꢀꢀ
加强筋缘
57.70
ꢀꢀꢀꢀꢀꢀꢀ
过滤器
58.80
ꢀꢀꢀꢀꢀꢀꢀ
可置换透气集尘袋
59.800
ꢀꢀꢀꢀꢀꢀ
集尘袋口
60.810
ꢀꢀꢀꢀꢀꢀ
硬质接口卡板
61.820
ꢀꢀꢀꢀꢀꢀ
软质透气袋体
62.830
ꢀꢀꢀꢀꢀꢀ
软质卡板耳带
具体实施方式
63.为使本实用新型的目的、技术方案及优点更加清楚明白,以下参照附图并举实施
例,对本实用新型进一步详细说明。
64.图1为一个实施例中的集尘组件的分解状态示意图。图2a和图2b为如图1所示的集尘组件的装配结构示意图。图3为如图1所示的集尘组件使用的可置换透气集尘袋的结构示意图。图4为如图1所示的集尘组件安装可置换透气集尘袋的原理示意图。图5 为如图1所示的集尘组件的工作状态示意图。图6为如图1所示的集尘组件拆卸可置换透气集尘袋的原理示意图。请参见图1,并同时结合图2a和图2b以及图3至图6,在该实施例中,扫地机器人的集尘组件可以包括集尘盒50和活动盖60。
65.集尘盒50能够装设于扫地机器人,并且可以从扫地机器人拆卸。在该实施例中,集尘盒50可以具有集尘内腔500,并且,该集尘盒50还可以具有与集尘内腔500连通的内腔开口510。
66.集尘盒50还可以具有与集尘内腔500连通的通风盒壁520,以允许贯穿集尘内腔500 的气流流动。例如,该通风盒壁520可以与内腔开口510相对布置。并且,作为一种优选方式,该通风盒壁520可以装设有过滤器70。
67.活动盖60能够在内腔开口510处封闭集尘内腔500,也可以离开内腔开口510以打开集尘内腔500。优选地,为了使活动盖60能够一体集成在集尘盒50,该活动盖60可以枢转装设于集尘盒50,并且,活动盖60可以通过相对于集尘盒50的枢转而在封闭集尘内腔500、以及打开集尘内腔500的姿态之间切换,并且,在内腔开口510处封闭集尘内腔500的活动盖60可以与集尘盒50卡接锁止。
68.例如,在图1和图2a以及图4至图6中,集尘盒50可以具有枢转支架550,活动盖60可以具有枢转支腿650,并且活动盖60可以通过枢转支腿650在枢转支架550的转动连接而枢转装设于集尘盒50,但可以理解的是,活动盖60在集尘盒50的枢转装设方式可以不限于此。
69.并且,在图1和图2a以及图4至图6中,集尘盒50还可以具有闭合卡扣560,活动盖60可以具有闭合卡槽660,通过闭合卡扣560与闭合卡槽660的卡接配合,在内腔开口510处封闭集尘内腔500的活动盖60可以与集尘盒50卡接锁止。
70.无论活动盖60与集尘盒50之间采用何种装配方式,活动盖60都可以具有集尘风口 600,该集尘风口600用于与扫地机器人的清扫组件连通,以接收从清扫组件传递而来的载尘气流91,在本文中,载尘气流91是指携带有灰尘的气流,并且,这里所述的灰尘可以包括粉尘、碎屑以及颗粒等能够随气流流动而移动的污物。
71.并且,该活动盖60还可以具有装袋机构610,该装袋机构610可以用于像如图4所示的那样可拆卸地装设可置换透气集尘袋80,并使得可置换透气集尘袋80的集尘袋口 800与集尘风口600对接。
72.当活动盖60在遮盖集尘盒50的内腔开口510处封闭集尘盒50的集尘内腔500时,如图5所示,可置换透气集尘袋80位于集尘盒50的集尘内腔500的内部。
73.若集尘盒50此时装设在扫地机器人中,则,来自于扫地机器人的清扫组件的载尘气流91可以从集尘风口600向集尘盒50的集尘内腔500的内部流动,并且,从集尘风口 600流向集尘盒50的集尘内腔500的内部的载尘气流91,可以从集尘袋口800被灌入至集尘袋80,从而使得:
74.载尘气流91中的灰尘90被收集在可置换透气集尘袋80内;
75.并且,从可置换透气集尘袋80贯穿渗出洁净气流92,该洁净气流92可以看作是载
613,盖加强筋框613可以从活动盖60朝向集尘内腔500一侧的盖表面凸起,从而,加强筋框613可以将滑入至插拔滑轨611的硬质接口卡板810支撑为与活动盖60朝向集尘内腔500一侧的盖表面之间具有间隙,并且,加强筋框613可以在该间隙内形成集尘袋口800与集尘风口600之间的密闭气流通道,从而,可以确保集尘袋口800与集尘风口 600之间的密封性,以避免载尘气流91从集尘袋口800与集尘风口600之间泄漏。
89.从图8和图9中还可以看出,为了增强活动盖60的整体强度,活动盖60的边缘处可以进一步布置有从活动盖60朝向集尘内腔500一侧的盖表面凸起的加强筋缘670,盖加强筋缘670会对硬质接口卡板810在插拔滑轨611的插拔形成轻微的干涉阻碍,在此情况下,装袋机构610可以进一步包括位于插拔滑轨611的端部(即远离活动盖60与集尘盒50的枢转轴线的一端)的滑轨扩口612,以使硬质接口卡板810能够以避让加强筋缘670的倾斜姿态滑入插拔滑轨611或从插拔滑轨611脱离。从而,可以在兼顾活动盖 60的强度的情况下,确保可置换透气集尘袋80的装卸。
90.另外,请在关注图8和图9的同时进一步回看图7,可置换透气集尘袋80可以进一步包括从硬质接口卡板810延伸的软质卡板耳带830,其中,当硬质接口卡板810以避让加强筋缘670的倾斜姿态插入在滑轨扩口612时,该硬质接口卡板810可以响应于软质卡板耳带830受到的外部拉力,滑入至插拔滑轨611中。
91.在另一个实施例中,提供了一种扫地机器人,该扫地机器人可以包括移动底盘、以及承载于移动底盘的抽吸组件、清扫组件、以及前述实施例中的集尘组件,其中:
92.在移动底盘的可移动范围中的任意位置,抽吸组件驱动形成从清扫组件流向集尘组件的集尘风口600的载尘气流91。
93.图10为另一个实施例中的扫地机器人的示例性结构示意图。请参见图10,清扫组件可以包括滚刷罩壳10和旋转滚刷30。
94.滚刷罩壳10可以具有罩壳内腔110,该罩壳内腔110可以具有卷刷窗口130、以及以预设相位偏差相对于卷刷窗口130布置的抽吸风口150.
95.旋转滚刷30的一部分可以位于罩壳内腔110内、另一部分则可以从卷刷窗口130 探出在罩壳内腔110之外。
96.具体地,旋转滚刷30可以包括滚刷转轴310、以及分布在滚刷转轴310的外周的滚刷刷扇330,其中,滚刷刷扇330可以绕滚刷转轴310的轴线方向间隔布置,并且,滚刷刷扇330可以相对于滚刷转轴310的轴线方向偏斜布置。在滚刷转轴310被驱动旋转的期间内,滚刷刷扇330可以绕滚刷转轴310的轴线循环翻转,以将地面的灰尘90卷刷上扬至罩壳内腔110内。
97.被卷刷上扬的灰尘90可以被扫地机器人的抽吸组件(未在附图中示出)从抽吸风口 150抽出,从而形成流向集尘组件的集尘风口600的载尘气流91。
98.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型保护的范围之内。