1.本发明的领域涉及用于加工食物物质诸如牛奶或含牛奶物质的具有能够单手抓住的食物加工容器的机器。例如,该机器设置有叶轮和/或热管理布置结构。
背景技术:
2.其中至少一部分由起泡或加热的牛奶制成的特制饮料正变得越来越受欢迎。此类型最著名的饮料是卡布奇诺类咖啡。其包含由咖啡组成的液体部分,其顶部有一层起泡牛奶,由于起泡牛奶密度非常低,因此漂浮在液体表面顶上。一般来讲,制备一杯咖啡需要时间、操作和清洁。
3.基于牛奶的泡沫可在机械搅拌器具中制备。需设想对该器具的箱体箱体进行定期清洁,以去除任何固体食物残渣。此外,将牛奶加热往往会增加煮熟或焦糊的蛋白质沉积并附着在表面上的程度。
4.美国专利6,318,247涉及一种利用搅拌来制备热饮或食物(诸如热巧克力)的器具。在专利文献wo 2004/043213或de 196 24 648中描述了用于搅拌食物产品的其它装置。文件us 2,932,493、de 1 131 372、us 4,537,332和us 6,712,497中描述了磁性接合型的搅拌系统。de 89 15 094涉及一种用于分配基于牛奶的饮料的冷藏罐。美国专利3,356,349公开了一种搅拌装置,其具有加热箱体箱体和位于箱体箱体下方的磁性驱动装置,该磁性驱动装置用于驱动定位在箱体中部的毂。
5.wo 2016/202814、wo 2016/202815、wo 2016/202816、wo 2016/202817、wo 2018/108804和wo 2018/108807中公开了使用搅拌系统(具体地讲是磁性驱动搅拌系统)的饮料加工器具的另外示例。
6.wo 2006/050900、wo 2008/142154、wo 2010/023313、wo 2011/039222、wo 2011/039224和wo 2017/216133中提出了一种用于由基于牛奶的液体或牛奶来制备泡沫的改进型器具。该装置具有:用于接收要起泡的液体的内箱体,可旋转的搅拌器定位在该内箱体中;保持箱体的外支架;驱动和控制装置,该驱动和控制装置位于定位在内箱体与外支架之间的腔室中,并且其与定位在支架外表面上的开关和电连接件连通;以及用于在起泡期间优化牛奶循环的扰动装置。
7.可通过使用例如如wo 2019/101765中所公开的感应系统将热量提供到加工箱体中。
8.人们已经提出为咖啡机提供这种类型的牛奶调理箱体,如wo 2009/074555和wo 2011/144647中所述。在wo 2009/074555中,加工箱体的竖直表面被成形为便于手抓持。
9.一种有利于排出牛奶起泡电气组件运行所产生的不必要热量的架构已公开于wo 2016/202818中。如wo 2018/108808和wo 2019/101764中所公开,此类器具还可配有一个或多个风扇冷却器。
10.wo 2017/216133、wo 2019/101765和pct/ep19/057841公开了一种饮料加工箱体。饮料可在该箱体中加热。为了分配所加工的饮料,该箱体配有手柄,该手柄具有从箱体突出
的连接构件和在连接构件上方和下方延伸的大致竖直的细长抓持部件。
11.wo 2017/098037公开了一种具有加热壁和离心叶轮的饮料加工箱体,其速度在加工期间变化,以偏移(低饮料速度)加热壁的热点,从而避免在此类热点处的饮料局部过热。
12.仍然需要改善对此类器具中的饮料的加工。
技术实现要素:
13.本发明的优选目的是提供一种用于优化食物物质诸如牛奶或基于牛奶的物质的起泡以提供高质量泡沫的机器,例如能够在环境温度或更低温度下使较大量食物物质起泡和/或使食物物质起泡的机器。
14.本发明因此涉及用于加工液体食物物质诸如牛奶或基于牛奶的物质的机器。液体食物物质能够是含水的,例如,含有咖啡和/或巧克力和/或可可。
15.该机器可以是独立机器,例如可以经由电线直接插入主电源,或者可以集成到经布置以加工其它食物或执行不同的食物调理过程的食物处理器中,该食物处理器本身通常能够经由电线插入主电源,而该机器是食物处理器的子部件。此类食物处理器可以是饮料制造机(诸如咖啡机),例如被构造成从原料胶囊制备饮料(诸如咖啡)的饮料制造机。
16.本发明的机器可以有利地被构造成使牛奶起泡和/或将牛奶加热和/或冷却,并且任选地作为独立机器或作为集成机器而与咖啡机相联合。在例如wo 2006/050900、wo 2008/142154、wo 2009/074555、wo 2010/023312和wo 2010/023313中公开了独立机器以及与牛奶起泡机和咖啡机的集成式关联。
17.因此,该机器能够是牛奶起泡机,通过在牛奶中掺入精细粉碎的气泡(例如,空气气泡)来工作。当该机器被构造成用于将气泡掺入牛奶中时,其可以包括不引入气泡的操作模式。
18.本发明的机器被构造用于加工液体食物物质,诸如牛奶或基于牛奶的物质。
19.因此,该机器包括具有腔室的箱体,该腔室用于容纳和加工一个批次的液体食物物质诸如牛奶或基于牛奶的物质。
20.腔室可具有大于200ml的容积,例如在250ml至1250ml的范围内,诸如在300ml至1000ml的范围内,例如在450ml至850ml或500ml至700ml的范围内。
21.该箱体可具有通过可移除封盖例如经由密封件覆盖的检修开口。检修开口可以未覆盖或没有任何封盖。wo 2008/142154和pct/ep19/057844中公开了可移除封盖和/或密封件的示例。
22.可移除封盖可在箱体的边沿上方延伸并且具有向下延伸以形成外封盖面的周壁。外封盖面可具有在0.5cm至5cm范围内、例如在1.5cm至3.5cm范围内的高度。外封盖面可与容器的未被封盖覆盖的外表面和/或与基座的外面齐平延伸。
23.可移除封盖可具有沿箱体的一个或上述边沿向下延伸到腔室中的竖直内壁。例如,周壁和/或竖直内壁具有用于密封箱体的腔室的密封构件,诸如环形的可变形密封构件,例如上述密封件。此类密封构件可包括以下特征中的至少一个特征:密封构件具有一个或多个基本上平行的密封唇缘,诸如并排布置的环形唇缘;密封构件具有用于卡住密封构件的突片;以及密封构件能够从封盖移除,例如用于清洁,并且能够安装在封盖上。
24.箱体可为基本上杯形或碗形或圆柱形的,侧壁为基本上竖直的,并且底壁为基本
上平坦或弯曲的。
25.箱体可以是机械无源的。因此,除了材料的固有机械特性使得其结构适于容纳食物物质并且可集成或组装在机器中之外,箱体可以不包括任何机械有源部件,诸如可能需要出于卫生或清洁目的而进行特殊保养的马达或运动变换系统。
26.机器具有位于腔室中的搅拌工具。该工具具有搅拌表面,用于对腔室中的食物物质施加机械作用以使食物物质起泡,例如从箱体的外部驱动的搅拌工具。搅拌工具可以是无源工具。
27.例如,搅拌表面由螺旋形弹簧和/或波形板和/或多个径向起泡翼形成。
28.机器具有被构造成使腔室中的搅拌工具旋转的致动器。例如,致动器例如经由箱体侧壁和/或底壁和/或顶壁磁性地联接到搅拌工具。
29.机器包括控制单元,该控制单元被配置成控制致动器,使得搅拌工具的旋转速度可改变。
30.例如,控制单元包括处理器和/或控制器和/或用户界面,例如位于外壳体处的用户界面。
31.搅拌工具可具有直立延伸细长部件。例如,此类部件的顶部带有径向突出元件,诸如球。
32.搅拌工具可具有直立拱形部件,诸如位于搅拌表面上方的拱形部件。例如,直立拱形部件位于直立延伸细长部件下方。
33.搅拌工具可包括用于与箱体的连接部件连接以将搅拌工具定位在箱体中的连接部件。可形成插头和插座布置结构的连接部件和/或磁性连接部件。连接部件可被构造成将搅拌工具定位在腔室中的中心直立轴线上或平行于此类轴线。
34.腔室和搅拌工具可被构造用于进行液体食物物质的(中心)对称加工或用于进行不对称加工。例如,使用流动扰动器在加工期间促进食物物质的匀化,例如通过将搅拌工具设置为相对于中心直立轴线移位和/或通过将干扰食物物质在加工期间的流动的障碍件布置在腔室中。
35.搅拌工具及其与机器的一体化可以是wo 2006/050900、wo 2008/142154、wo 2016/202814、wo 2016/202815、wo 2016/202816、wo 2016/202817、wo 2018/108804和wo 2018/108807中公开的类型。
36.箱体可以是电无源的。因此,除了材料的固有电特性(例如,电阻特性和/或电感特性和/或电容特性)使得其结构适于容纳食物物质并且可集成或组装在机器中之外,箱体可以不包括任何电气组件,特别是有源电气组件。然而,箱体的固有电特性可用于食物物质的加工,例如用于加热和/或冷却从箱体外部的(有源)源以电动或电磁方式供电的箱体。
37.控制单元具有这样的模式:其中,致动器由控制单元控制以使得:
[0038]-在加工批次的第一阶段期间,搅拌工具低于低起泡旋转速度旋转;以及之后
[0039]-在加工批次的第二阶段期间,搅拌工具的旋转速度从低起泡旋转速度增大至高于高起泡旋转速度;以及之后
[0040]-在加工所述批次的第三阶段期间,搅拌工具高于高起泡旋转速度旋转。
[0041]
在起泡过程开始时,搅拌工具因此可在一个批次的液体食物物质中以较低速度旋转,并且在一段时间之后搅拌工具可在一个批次的液体食物物质中以较高速度旋转。因此,
当一个批次的液体食物物质处于其初始液态时,以较低速度移动的搅拌表面不太可能驱赶液体和/或不太可能使液体食物物质升高到腔室中的不期望水平或超出腔室。之后,一旦液体食物物质已经部分起泡并且一个批次的液体食物物质的流体减少和/或体积增大(例如,由于部分起泡),也不太可能以较高速度从搅拌表面驱赶液体食物物质。由此可见,调节搅拌工具的速度以考虑起泡期间一个批次的液体食物物质的流动性和/或体积的程度,可能改善从搅拌表面到批次的能量传输(通过降低将批次从搅拌表面驱赶的影响)并且调节液体食物物质在加工开始时对搅拌器附近的空气的暴露。之后,这样部分起泡的液体食物物质可受益于较高速度。因此,可能减少获得所需质量的起泡液体物质的所需加工时间。当一个批次的液体食物物质例如牛奶或基于牛奶的物质不经历有利于物质起泡的同时热调理时,这种有益效果更有用。
[0042]
控制单元可被配置成控制致动器的功率源的电压供应和/或电流供应和/或频率,以调节搅拌工具的起泡旋转速度。
[0043]
关于致动器和控制单元,机器可不包括任何热调理器,或者机器可包括热调理器,该热调理器由控制单元控制以在第一阶段、第二阶段和第三阶段期间,诸如在用搅拌工具对腔室中的批次施加机械作用的总时间长度期间,诸如在腔室中加工批次的总时间长度期间,在上述模式下在腔室中基本上不产生热量。换句话讲,在上述模式下,腔室中可能完全不产生热量或基本上不产生热量。这并不排除以下事实:少量热量可能通过机械摩擦或机器中所用部件的固有电磁效应而产生,这些部件的用途不涉及热量产生,例如数据通信系统或电致动器(马达)。任选地,机器具有能够消耗来自腔室的热量以冷却批次的热调理器。
[0044]
在上述模式下,一个批次的液体食物物质可在腔室中保持基本上不加热,或者在一些实施方案中,甚至被冷却。因此,除了致动器和控制单元之外,机器可不包括专用热量产生装置,特别是不包括任何热调理器,或者当存在时,可操作此类热调理器以不在此模式下产生热量。
[0045]
wo 2006/050900、wo 2008/142154、wo 2010/023312、wo 2010/023313和wo 2019/101765中公开了合适的热调理器的示例。
[0046]
当液体食物物质在腔室中保持不加热或甚至被冷却时,可通过以较高速度用搅拌工具加工液体食物物质来获得更好的起泡质量。在这种情况下,可有利地实施本发明。
[0047]
控制单元可在上述模式下被配置成使得在以下情况中的至少一种情况之后执行第二阶段:
[0048]-对应于第一阶段的预定时间段,诸如在10秒至45秒、诸如15秒至35秒、例如20秒至25秒的范围内的时间段;以及
[0049]-当搅拌工具已经低于低起泡旋转速度至少10%、诸如至少20%、例如至少30%、例如至少40%旋转时,对搅拌工具的旋转的阻力已增大。
[0050]
此类阻力可例如用以下量度来测量:搅拌工具上的扭矩的量度;或致动器旋转搅拌工具所消耗的功率的量度,例如致动器所消耗的电流和/或电压的量度。
[0051]
例如,当搅拌工具的速度由施加到致动器的电压控制时,致动器在受控电压下所消耗的电流的量度可用于指示液体食物物质抵抗搅拌工具的旋转的阻力(或其随时间的演变)。
[0052]
控制单元可在上述模式下被配置成控制致动器,以便在启动阶段期间从旋转速度
为零的静止状态驱动搅拌工具,以在一定时间段内到达第一阶段,该时间段在2秒至25秒、诸如5秒至20秒、例如10秒至15秒的范围内。可在启动阶段期间以一定旋转速度驱动搅拌工具,该旋转速度从零增大至高于低起泡旋转速度,然后降至低于低起泡旋转速度,诸如:至高于低起泡旋转速度不到15%,例如不到10%;和/或高于低起泡旋转速度不到10秒、例如不到6秒的时间段。
[0053]
在上述模式下的第二阶段期间,搅拌工具的旋转速度可从低旋转速度增大,以在一定时间段内到达第三阶段,该时间段在5秒至30秒、诸如10秒至20秒、例如12秒至16秒的范围内。可在第二阶段期间以一定旋转速度驱动搅拌工具,该旋转速度从低起泡旋转速度增大至高于高旋转速度,然后朝着高旋转速度降低,诸如:增大至高于高旋转速度不到10%,例如不到5%;和/或高于低起泡旋转速度不到10秒、例如不到6秒的时间段。
[0054]
在上述模式下的第一阶段期间,旋转速度可维持在低旋转速度3%或5%的跨度内,稍微低于低旋转速度。
[0055]
在上述模式下的第三阶段期间,旋转速度可维持在高旋转速度2%至4%的跨度内,稍微高于高旋转速度。
[0056]
在上述模式下,第一阶段和第三阶段可持续在以下范围内的累积时间段:45秒至90秒,诸如50秒至80秒,例如55秒至70秒,例如60秒至65秒;和/或用搅拌工具对腔室中的批次施加机械作用的总时间长度、诸如加工腔室中的批次的总时间长度的50%至95%,诸如55%至80%,例如60%至70%。
[0057]
在上述模式下,用搅拌工具对腔室中的批次施加机械作用的一个或上述总时间长度可在60秒至120秒、诸如70秒至110秒、例如80秒至100秒、例如85秒至95秒的范围内。
[0058]
高旋转速度和低旋转速度可具有在1.02至5、诸如1.05至2.5、例如1.1至1.7、例如1.13至1.2的范围内的比率。
[0059]
低旋转速度可在10hz至50hz、诸如15hz至40hz、例如20hz至35hz、例如25hz至30hz的范围内。
[0060]
高旋转速度可在15hz至75hz、例如20hz至65hz、诸如25hz至50hz、例如30hz至35hz的范围内。
[0061]
控制单元可具有其中致动器由控制单元控制的不同模式,使得:
[0062]-在加工一个批次的液态食物物质的初始阶段期间,例如初始阶段持续在0.5秒至15秒、诸如2秒到12秒、例如4秒至9秒的范围内的时间段,搅拌工具从零旋转至恒定起泡旋转速度;以及之后
[0063]-在加工此类批次的主要阶段期间,例如主要阶段持续在50秒至250秒、诸如75秒至175秒、例如100秒至140秒的范围内的时间段,搅拌工具的旋转速度基本上维持在恒定旋转速度,例如维持在恒定旋转速度或在高于和/或低于恒定旋转速度的恒定旋转速度的不到5%的范围内,诸如不到2%的范围内,任选地,恒定旋转速度基本上等于低旋转速度或在10hz至50hz、诸如15hz至40hz、例如20hz至35hz、例如25hz至30hz的范围内;以及之后
[0064]-在加工所述批次的结束阶段期间,例如结束阶段持续在0.5秒至10秒、诸如1.5秒至7.5秒、例如3秒至5秒的范围内的时间段,允许搅拌工具的旋转速度降至零。
[0065]
箱体可与由控制单元控制的热调理器相关联,在该不同模式下,控制单元控制热调理器在腔室中产生热量,以便将所述批次加热到例如在55℃至70℃、例如60℃至65℃的
范围内的温度。
[0066]
如例如从现有技术所知晓的,可提供具有搅拌工具的不同速度特征(以及任选地对应的热调理特征,例如加热和/或冷却)的另外模式,以加工腔室中的液体食物物质。
[0067]
机器可包括支撑箱体的基座。
[0068]
基座可容纳致动器和控制单元以及任选的一个或上述热调理器。此类热调理器可与箱体侧壁和/或底壁相关联,该箱体侧壁和/或底壁被构造成将热能发射到腔室中和/或从腔室吸收热能。热调理器可结合电阻器例如厚膜电阻器、感应件、热电偶和热泵中的至少一者。
[0069]
致动器例如马达、控制单元、用户界面、ac/dc转换器可全部包括在基座中。
[0070]
箱体可为固定的或与基座成一体,或者能够由用户与基座分离,例如用于清洁或维修。
[0071]
通过提供机械无源和/或电无源(任选地带有同等无源的封盖)的箱体,如果箱体能够与基座分离,则可容易地例如在洗碗水中清洁该箱体,而不存在任何损坏电气组件和/或机械组件的风险。
[0072]
相同的结果可在不能够(由用户)从具有控制腔室(例如,容纳机械和/或电控制有源组成部分,诸如致动器和信号处理单元)的基座移除箱体的情况下实现,该控制腔室没有用橡胶、有机硅或类似的密封件密封的可移动检修板,该密封件容易磨损,尤其是当暴露于用于清洁的洗涤剂或皂时。因此,相同的结果可在基座包括被容纳在不可检修的密闭控制腔室中的有源组件的情况下实现,该基座例如是整个模制的和/或焊接在此类密闭腔室周围,使得腔室完全陷入基座的结构中并且与基座外部的环境分离,在不破坏基座的情况下无法从外部检修。在此类情况下,基座可在此类密闭的不可检修的腔室中包括有源装置,例如rfid型装置等,并且还适用于在洗碗机中进行清洁。
[0073]
基座可具有直立外抓持表面,例如有纹理的或有条纹的或有波纹的或起伏的或有直纹的或平坦的表面,以有利于手抓持,该表面位于箱体下方并且能够被成人的手抓住,使得通过抓住直立外抓持表面,可单手携带和移动基座及所支撑的箱体。
[0074]
当为此类基座提供围绕基座的至少大部分水平延伸的外抓持表面时,机器不需要配备从外面突出的细长手柄,例如公开于wo 2006/050900或pct/ep19/057841中的多种类型。
[0075]
箱体可水平地延伸超出外抓持表面。
[0076]
通过允许箱体延伸超出外抓持表面,箱体的腔室容积可对应地以横向方式增加,而不影响抓持表面被成人的手抓持的能力,即,与在现有技术设计中一样,抓持表面不随箱体的腔室容积而增加。此类构造允许在横向上而不是在高度上加工增加体积的液体食物物质,这对于例如在加工期间将空气掺入液体食物物质中(例如,以使液体食物物质起泡)时是有利的。
[0077]
箱体超出基座的外抓持表面的此类横向延伸部也可用作抓持人手上的支撑表面,以改善对机器的单手抓住。
[0078]
外抓持表面可为至少基本上竖直的,例如竖直的或相对于竖直方向倾斜小于15度、例如小于10度、诸如小于5度、例如小于2.5度的角度。
[0079]
箱体可具有外水平箱体周边。
[0080]
箱体可在其箱体周边的主要部分上水平地延伸超出外抓持表面,例如超出其周边的50%以上或75%以上,诸如超出基本上整个周边,例如超出周边的90%或95%以上。
[0081]
周边可具有在15cm至70cm、例如20cm至60cm、诸如25cm至50cm、例如30cm至40cm的范围内的周长。
[0082]
箱体可具有竖直外箱体表面,并且腔室可具有高度。外水平周边可沿外箱体表面延伸。外箱体表面可在基本上整个腔室高度上在基本上其整个箱体周边上水平地定位成超出外抓持表面。竖直外箱体表面可水平地定位成超出外抓持表面一定距离,该距离在0.5cm至10cm、例如1cm至7cm、诸如1.5cm至5cm、例如2cm至4cm的范围内。
[0083]
竖直外箱体表面可为至少基本上竖直的,例如竖直的或相对于竖直方向倾斜小于15度、诸如小于10度、例如小于5度、例如小于2.5度的角度。
[0084]
机器可包括形成直立外抓持表面的外壳体,该外壳体沿外箱体表面的至少一部分竖直地延伸。壳体可具有基本上水平和/或倾斜的中间部分,例如直的或弯曲的部分,该中间部分从直立外抓持表面的顶部延伸到竖直外箱体表面的底部。倾斜的中间部分与水平方向的倾斜度可在15度至75度、诸如20度至70度、例如40度至60度的范围内。
[0085]
机器可包括具有底侧的底脚,该底侧被构造成:在加工一个批次的液体食物物质期间,放置在基本上水平的外支撑表面上,诸如由台面或搁板形成的表面上;以及在此类加工期间支撑基座。例如,底脚组装到或固定到基座或与基座成一体。
[0086]
基座可以可拆卸地安装到底脚。基座和底脚可具有连接件。
[0087]
连接件可被构造成在此类加工期间抑制或防止基座和底脚围绕沿外支撑表面延伸的轴线的相对枢转。例如,连接件是机械的和/或磁性的。
[0088]
连接件可被构造成将电力从底脚传导到基座中。例如,底脚具有用于连接到外部电源诸如干线的电线。
[0089]
连接件可被构造成能够以插头和插座方式连接。例如,连接件可具有底脚的插头部件和基座的插座部件,或者相反。
[0090]
底脚可水平地延伸超出外抓持表面,例如,底脚水平地延伸至或超出箱体。例如,底脚水平地延伸超出外抓持表面一定距离,该距离在0.5cm至15cm、例如1cm至10cm、诸如1.5cm至7cm、例如2cm至3cm的范围内。
[0091]
提供大底脚,例如大于抓持表面,可增强机器在外加工表面上进行的加工期间的稳定性。
[0092]
直立外抓持表面可具有一定高度,沿着该高度成人的手能够抓住该表面,以用于单手携带和支撑基座和箱体。该高度可为至少3cm,例如在4cm至20cm的范围内,诸如5cm至16cm,例如6cm至12cm。
[0093]
腔室可具有大于200ml的容积,例如在250ml至1250ml的范围内,诸如在300ml至1000ml的范围内,例如在450ml至850ml或500ml至700ml的范围内。
[0094]
腔室或搅拌工具的竖直部件可关联到或包括指示布置结构,在腔室中进行液体食物物质的加工之前,指示布置结构用于辅助利用液体食物物质来适当地填充腔室以形成批次。例如,指示布置结构具有:指示器,例如高位指示器,用于指示在没有发泡的情况下热调理一个批次的液体食物物质的最高液位;以及/或者指示器,例如低位指示器,用于指示在有或没有热调理的情况下使一个批次的液体食物物质起泡的最高液位。指示器可包括语言
符号、对应搅拌工具的符号例如象形图和液位符号中的至少一者。
[0095]
搅拌工具可包括用于使一个批次的液体食物物质在其热调理期间匀化的匀化装置,诸如具有至少一个径向匀化臂例如2个、3个或4个此类臂的匀化装置。
[0096]
机器可具有一个或上述中心直立轴线,箱体、腔室以及如果存在情况下的基座和/或底脚中的至少一者沿该中心直立轴线延伸。例如,箱体、腔室以及如果存在情况下的基座和/或底脚中的至少一者具有围绕中心直立轴线的回转形状,诸如圆柱形和/或圆锥形和/或球形形状。
[0097]
wo 2008/142154和pct/ep19/060854中公开了此类形状的示例。
[0098]
当在本说明书中提及相对于机器或其部件的取向或位置时,例如“上方”或“下方”或“竖直”或“水平”,取向或位置以操作时机器用于加工箱体中液体食物物质的位置和方向为参考,除非另外指明。
附图说明
[0099]
现在参照示意图描述本发明,其中:
[0100]-图1是根据本发明构造的机器的透视侧视图,该机器具有位于基座上的箱体以及底脚、搅拌工具、致动器和控制单元;
[0101]-图2是图1的机器的透视侧视图,其中箱体和基座已经与底脚分开;
[0102]-图3是图1所示的机器的剖面透视图;
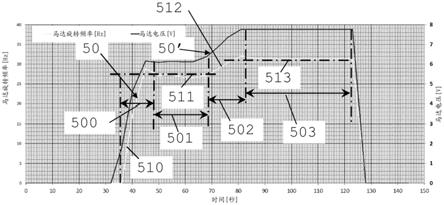
[0103]-图4是示出在图1的机器的控制单元的有利模式下,致动器的控制和搅拌工具的旋转速度随时间推移的图示;以及
[0104]-图5是示出在图1的机器的控制单元的不同模式下,致动器的控制和搅拌工具的旋转速度随时间推移的图示。
具体实施方式
[0105]
在图1至图3中,示出了根据本发明的机器1的示例性实施方案。图4和图5示出了机器的控制单元操作机器的搅拌工具的两种可能模式。
[0106]
机器1具有带有腔室10'的箱体10,该腔室用于容纳和加工一个批次的液体食物物质诸如牛奶或基于牛奶的物质。箱体10可具有通过可移除封盖12例如经由密封件13覆盖的检修开口。
[0107]
机器1具有位于腔室10'中的搅拌工具15。工具15具有搅拌表面151,用于对腔室10'中的食物物质施加机械作用以使食物物质起泡。可从箱体10的外部驱动搅拌工具15。搅拌表面151可由螺旋形弹簧和/或波形板和/或多个径向起泡翼形成。
[0108]
机器1包括被构造成在腔室10'中旋转搅拌工具15的致动器。致动器可例如经由箱体侧壁和/或底壁和/或顶壁磁性地联接到搅拌工具15。
[0109]
机器1具有控制单元,该控制单元被配置成控制致动器,使得搅拌工具15的旋转速度可改变。例如,控制单元包括处理器和/或控制器和/或用户界面26,例如位于外壳体2处的用户界面26。
[0110]
搅拌工具15可具有直立延伸细长部件16。部件16的顶部可带有径向突出元件161,诸如球。
[0111]
搅拌工具15可具有直立拱形部件162,诸如位于搅拌表面151上方的拱形部件。例如,直立拱形部件162位于直立延伸细长部件16下方。
[0112]
搅拌工具15可具有用于与箱体10的连接部件17连接以将搅拌工具15定位在箱体10中的连接部件163。可形成插头和插座布置结构的连接部件163、17和/或磁性连接部件。例如,连接部件163、17可被构造成将搅拌工具15定位在腔室10'中的中心直立轴线1'上或平行于轴线1'。
[0113]
控制单元具有这样的模式:其中,致动器由控制单元控制以使得:
[0114]-在加工批次的第一阶段501期间,搅拌工具15低于低起泡旋转速度511旋转;以及之后
[0115]-在加工批次的第二阶段502期间,搅拌工具15的旋转速度512从低起泡旋转速度511增大至高于高起泡旋转速度513;以及之后
[0116]-在加工批次的第三阶段503期间,搅拌工具15高于高起泡旋转速度513旋转。
[0117]
控制单元可被配置成控制致动器的功率源的电压供应50'和/或电流供应和/或频率,以调节搅拌工具15的起泡旋转速度50。
[0118]
对于控制单元和致动器,此类机器1可不包括任何热调理器,或者可包括热调理器23,该热调理器23由控制单元控制以在第一阶段501、第二阶段502和第三阶段503期间,诸如在用搅拌工具15对腔室10'中的批次施加机械作用的总时间长度期间,诸如在腔室10'中加工批次的总时间长度期间,在上述模式下在腔室10'中基本上不产生热量。
[0119]
控制单元可在上述模式下被配置成使得在以下情况中的至少一种情况之后执行第二阶段502:对应于第一阶段501的预定时间段,诸如在10秒至45秒、诸如15秒至35秒、例如20秒至25秒的范围内的时间段;以及当搅拌工具15已经低于低起泡旋转速度511至少10%、诸如至少20%、例如至少30%、例如至少40%旋转时,对搅拌工具15的旋转的阻力已增大。
[0120]
控制单元在上述模式下被配置成控制致动器,以便在启动阶段500期间从旋转速度50为零的静止状态驱动搅拌工具15,以在一定时间段内到达第一阶段501,该时间段在2秒至25秒、诸如5秒至20秒、例如10秒至15秒的范围内。可在启动阶段500期间以一定旋转速度510驱动搅拌工具15,该旋转速度510从零增大至高于低起泡旋转速度511,然后降至低于低起泡旋转速度511,诸如:至高于低起泡旋转速度511不到15%,例如不到10%;和/或高于低起泡旋转速度511不到10秒、例如不到6秒的时间段。
[0121]
在第二阶段502期间,搅拌工具15的旋转速度50从低旋转速度511增大,以在一定时间段内到达第三阶段503,该时间段在5秒至30秒、诸如10秒至20秒、例如12秒至16秒的范围内。可在第二阶段502期间以一定旋转速度512驱动搅拌工具15,该旋转速度512从低起泡旋转速度511增大至高于高旋转速度513,然后朝着高旋转速度513降低,诸如:增大至高于高旋转速度513不到10%,例如不到5%;和/或高于低起泡旋转速度511不到10秒、例如不到6秒的时间段。
[0122]
在第一阶段501期间,旋转速度50可维持在低旋转速度511的3%或5%的跨度内,稍微低于低旋转速度511。
[0123]
在第三阶段503期间,旋转速度可维持在高旋转速度513的2%至4%的跨度内,稍微高于高旋转速度513。
[0124]
第一阶段501和第三阶段503可持续在以下范围内的累积时间段:45秒至90秒,诸如50秒至80秒,例如55秒至70秒,例如60秒至65秒;和/或用搅拌工具15对腔室10'中的批次施加机械作用的总时间长度、诸如加工腔室10'中的批次的总时间长度的50%至95%,诸如55%至80%,例如60%至70%。
[0125]
用搅拌工具15对腔室10'中的批次施加机械作用的一个或上述总时间长度可在60秒至120秒、诸如70秒至110秒、例如80秒至100秒、例如85秒至95秒的范围内。
[0126]
高旋转速度513和低旋转速度511可具有在1.02至5、诸如1.05至2.5、例如1.1至1.7、例如1.13至1.2的范围内的比率。
[0127]
低旋转速度511可在10hz至50hz、诸如15hz至40hz、例如20hz至35hz、例如25hz至30hz的范围内。
[0128]
高旋转速度513可在15hz至75hz、例如20hz至65hz、诸如25hz至50hz、例如30hz至35hz的范围内。
[0129]
控制单元可具有其中致动器由控制单元控制的不同模式,使得:
[0130]-在加工批次的初始阶段500a期间,例如初始阶段500a持续在0.5秒至15秒、诸如2秒到12秒、例如4秒至9秒的范围内的时间段,搅拌工具15从零旋转至恒定起泡旋转速度511a;以及之后
[0131]-在加工批次的主要阶段501a期间,例如主要阶段501a持续在50秒至250秒、诸如75秒至175秒、例如100秒至140秒的范围内的时间段,搅拌工具15的旋转速度50基本上维持在恒定旋转速度511a,例如维持在恒定旋转速度511a或在高于和/或低于恒定旋转速度511a的恒定旋转速度的不到5%的范围内,诸如不到2%的范围内,任选地,恒定旋转速度511a基本上等于低旋转速度511或在10hz至50hz、诸如15hz至40hz、例如20hz至35hz、例如25hz至30hz的范围内;以及之后
[0132]-在加工批次的结束阶段502a期间,例如结束阶段500a持续在0.5秒至10秒、诸如1.5秒至7.5秒、例如3秒至5秒的范围内的时间段,允许搅拌工具15的旋转速度50降至零。
[0133]
箱体10可与由控制单元控制的热调理器23相关联,在此类不同模式下,该控制单元控制热调理器23在腔室10'中产生热量,以便将一个批次的液体食物物质诸如牛奶或基于牛奶的物质加热到例如在55℃至70℃、例如60℃至65℃的范围内的温度。
[0134]
机器1可包括支撑箱体10的基座20。基座10可容纳致动器和控制单元以及任选的一个或上述热调理器23。热调理器23可与箱体侧壁和/或底壁相关联,该箱体侧壁和/或底壁被构造成将热能发射到腔室10'中和/或从腔室吸收热能。热调理器可包括电阻器例如厚膜电阻器23、感应件、热电偶和热泵中的至少一者。
[0135]
基座20可具有直立外抓持表面21,例如有纹理的或有条纹的或有波纹的或起伏的或有直纹的或平坦的表面,以有利于手抓持,该表面位于箱体10下方并且能够被成人的手抓住,使得通过抓住直立外抓持表面21,可单手携带和移动基座20及所支撑的箱体10。箱体10可水平地延伸超出外抓持表面21。外抓持表面21可为至少基本上竖直的,例如竖直的或相对于竖直方向倾斜小于15度、例如小于10度、诸如小于5度、例如小于2.5度的角度。
[0136]
箱体10可具有外水平箱体周边。
[0137]
箱体10可在其箱体周边的主要部分上水平地延伸超出外抓持表面21,例如超出其周边的50%以上或75%以上,诸如超出基本上整个周边,例如超出周边的90%或95%以上。
[0138]
周边可具有在15cm至70cm、例如20cm至60cm、诸如25cm至50cm、例如30cm至40cm的范围内的周长。
[0139]
箱体10可具有竖直外箱体表面11,并且腔室10'可具有高度11'。外水平周边可沿外箱体表面11延伸。外箱体表面11可在基本上整个腔室高度11'上在基本上其整个箱体周边上水平地定位成超出外抓持表面21。竖直外箱体表面11可水平地定位成超出外抓持表面21一定距离21',该距离在0.5cm至10cm、例如1cm至7cm、诸如1.5cm至5cm、例如2cm至4cm的范围内。
[0140]
竖直外箱体表面11可为至少基本上竖直的,例如竖直的或相对于竖直方向倾斜小于15度、诸如小于10度、例如小于5度、例如小于2.5度的角度。
[0141]
机器1可包括形成直立外抓持表面21的外壳体2。外壳体2可沿外箱体表面11的至少一部分竖直地延伸。壳体2可包括从直立外抓持表面21的顶部延伸到竖直外箱体表面11的底部的基本上水平的和/或倾斜的中间部分22,例如直的或弯曲的部分,诸如与水平方向的倾斜度在15度至75度、诸如20度至70度、例如40度至60度的范围内的倾斜的中间部分22。
[0142]
机器1可具有带有底侧31的底脚30,该底侧被构造成:在加工一个批次的液体食物物质期间,放置在基本上水平的外支撑表面3上,诸如由台面或搁板形成的表面3上;以及在此类加工期间支撑基座20。底脚30可组装到或固定到基座20或与基座成一体。
[0143]
基座20可以可拆卸地安装到底脚30。基座20和底脚30可具有连接件25、35。
[0144]
连接件25、35可被构造成在此类加工期间抑制或防止基座20和底脚30围绕沿外支撑表面3延伸的轴线的相对枢转。连接件25、35可以是机械的和/或磁性的。
[0145]
连接件25、35可被构造成将电力从底脚30传导到基座20中。例如,底脚30具有用于连接到外部电源诸如干线的电线32。
[0146]
连接件25、35可被构造成能够以插头35和插座25方式连接。例如,连接件25、35具有底脚30的插头35部件和基座20的插座25部件,或者相反。
[0147]
底脚30可水平地延伸超出外抓持表面21,例如,底脚水平地延伸至或超出箱体10。底脚30可水平地延伸超出外抓持表面21一定距离21”,该距离在0.5cm至15cm、例如1cm至10cm、诸如1.5cm至7cm、例如2cm至3cm的范围内。
[0148]
直立外抓持表面21可具有一定高度21”',沿着该高度成人的手能够抓住表面21,以用于单手携带和支撑基座20和箱体10,该高度为至少3cm,例如在4cm至20cm、诸如5cm至16cm、例如6cm至12cm的范围内。
[0149]
腔室10'可具有大于200ml的容积,例如在250ml至1250ml的范围内,诸如在300ml至1000ml的范围内,例如在450ml至850ml或500ml至700ml的范围内。
[0150]
腔室10'或搅拌工具15的竖直部件16可关联到或包括指示布置结构18、19,在腔室10'中进行液体食物物质的加工之前,指示布置结构用于辅助利用液体食物物质来适当地填充腔室10'以形成批次。例如,指示布置结构具有:指示器18,例如高位指示器18,用于指示在没有发泡的情况下热调理批次的最高液位;以及/或者指示器19,例如低位指示器19,用于指示在有或没有热调理的情况下液体食物物质的最高液位。指示器可包括语言符号181、191、对应搅拌工具的符号例如象形图182、192和液位符号183、193中的至少一者。
[0151]
搅拌工具15可具有用于使一个批次的液体食物物质在其热调理期间匀化的匀化装置182,诸如具有至少一个径向匀化臂例如2个、3个或4个径向匀化臂的匀化装置。
[0152]
机器1可具有一个或上述中心直立轴线1',箱体10、腔室10'以及如果存在情况下的基座20和/或底脚30中的至少一者沿该中心直立轴线延伸。箱体10、腔室10'以及如果存在情况下的基座20和/或底脚30中的至少一者可具有围绕中心直立轴线1'的回转形状,诸如圆柱形和/或圆锥形和/或球形形状。