1.本实用新型涉及研抛机器人技术领域,具体为一种用于镜面研抛一体化机器人。
背景技术:
2.近年来,大口径复杂光学镜面在高分辨率对地观测卫星的光学相机、对天观测卫星、深空科学探测等领域的应用越来越广泛,但由于镜面材料的硬脆特性,其加工精度高、难度大、周期长,严重影响其应用,在光学镜面加工工序中,研抛(研磨、抛光)是衔接磨削以及后续磁流变等的重要工序,其加工效率和质量极大地影响镜面加工的质量和效率,目前,各类研抛设备很少应用于大型自由曲面的研抛加工,诸如对特大型螺旋桨表面的以及船体焊缝两侧表面的研抛加工,对于大型自由曲面来说,其研磨抛光基本上都是依靠工人手持研抛工具完成的,一方面,手工研抛加工不仅费时、费力、效率低下;另一方面,曲面的加工精度完全凭借工人的经验程度,加工质量不稳定,难以满足对大型自由曲面低成本、短周期和高质量的加工要求,摆脱该类困境的方法是研究和开发适合的自动化精整加工新设备,以实现自由曲面光整加工的自动化程度;但是目前的镜面研抛机器人的抛光装置都是固定安装座机器人上,十分不方便更换,不仅不方便维护,在加工不同镜面时,同一抛光装置无法达到研抛操作所需的刀具和电机功率,严重影响机器人的使用,整个机器人装置也比较固定,往往需要增加额外的固定座来调整高度,适应生产线高度,十分不方便。
技术实现要素:
3.本实用新型的目的在于提供一种用于镜面研抛一体化机器人,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种用于镜面研抛一体化机器人,包括底座,所述底座上端固定装配有高度调整装置,所述高度调整装置中间固定装配有转向装置,所述转向装置上端固定装配有第一机械腕,所述第一机械腕上端固定装配有第一机械臂,所述第一机械臂右端固定装配有第二机械腕,所述第二机械腕右端固定装配有第二机械臂,所述第二机械臂下端固定装配有电动伸缩杆,所述电动伸缩杆下端固定装配有推板,所述推板侧面套接有安装外壳,所述安装外壳上端固定装配在第二机械臂下端,所述安装外壳下端固定装配有挡板,所述挡板中间插接装配有抛光装置,所述安装外壳侧面螺接有侧面固装置。
5.优选的,所述高度调整装置包括液压缸,所述液压缸固定装配在底座上侧两端,所述液压缸上端插接装配有伸缩杆,所述伸缩杆上端固定装配有安装座。
6.优选的,所述转向装置包括电机支架,所述电机支架固定装配在安装座下侧中间,所述电机支架上端固定装配有第一电机,所述第一电机上端固定装配有转轴,所述转轴贯穿安装座在上端固定装配有立柱,所述立柱固定装配在第一机械腕下端。
7.优选的,所述抛光装置包括第二电机,所述第二电机夹紧装配在安装外壳内部,所述第二电机下端固定装配有第二转轴,所述第二转轴下端固定装配有抛光刀具。
8.优选的,所述侧面固定装置包括固定板,所述固定板左侧均匀螺接有第一固定螺栓,所述第一固定螺栓贯穿固定板底部顶在安装外壳内壁中,所述固定板左侧中间螺接有第二固定螺栓,所述第二固定螺栓右端转动装配有压紧板,所述压紧板右端顶接在电机上。
9.与现有技术相比,本方案设计了一种用于镜面研抛一体化机器人,具有下述有益效果:
10.(1)本装置的抛光装置通过推板和侧面固定装置压紧装配在安装外壳上,方便对抛光装置进行维护或更换,避免了机器人加工镜面单一,没法调整抛光装置的问题。
11.(2)本装置设置有高度调整装置,可以调整整个机器人的纵向高度,可以适应不同高度的生产线,不需要额外增加固定座来调整机器人高度。
12.(3)本装置设置有转向装置、第一机械腕和第二机械腕,可以为机器人提供横向和纵向的角度调整,让机器人可以灵活改变角度,便于镜面研抛。
附图说明
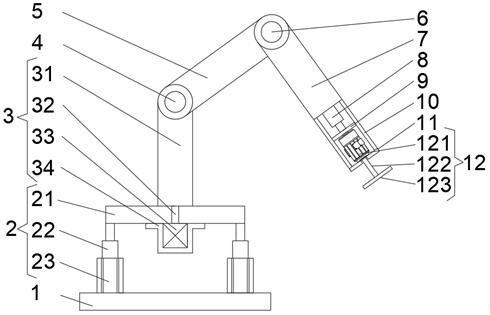
13.图1为本实用新型结构示意剖图;
14.图2为本实用新型安装外壳俯视截面结构示意图。
15.图中:1底座、2高的调整装置、21安装座、22伸缩杆、23液压缸、3转向装置、31立柱、32转轴、33第一电机、34电机支架、4第一机械腕、5第一机械臂、6第二机械腕、7第二机械臂、8电动伸缩杆、9推板、10安装外壳、11挡板、12抛光装置、121第二电机、122第二转轴、123抛光刀具、13侧面固定装置、131第一固定螺栓、132压紧板、133第二固定螺栓、134固定板。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
17.请参阅图1和图2,本实用新型提供一种技术方案:一种用于镜面研抛一体化机器人,包括底座1,底座1上端固定装配有高度调整装置2,高度调整装置2中间固定装配有转向装置3,转向装置3上端固定装配有第一机械腕4,第一机械腕4上端固定装配有第一机械臂5,第一机械臂5右端固定装配有第二机械腕6,第二机械腕6右端固定装配有第二机械臂7,第二机械臂7下端固定装配有电动伸缩杆8,电动伸缩杆8下端固定装配有推板9,推板9侧面套接有安装外壳10,安装外壳10上端固定装配在第二机械臂7下端,安装外壳10下端固定装配有挡板11,挡板11中间插接装配有抛光装置12,安装外壳10侧面螺接有侧面固装置13。
18.高度调整装置2包括液压缸23,液压缸23固定装配在底座1上侧两端,液压缸23上端插接装配有伸缩杆22,伸缩杆22上端固定装配有安装座21。
19.通过液压缸23压动伸缩杆22,可以改变安装座21的纵向高度,以适应不同生产线的需求。
20.转向装置3包括电机支架34,电机支架34固定装配在安装座21下侧中间,电机支架34上端固定装配有第一电机33,第一电机33上端固定装配有转轴32,转轴32贯穿安装座21在上端固定装配有立柱31,立柱31固定装配在第一机械腕4下端。
21.转向装置3可以领立柱31旋转,以改变机器人的加工角度。
22.抛光装置12包括第二电机121,第二电机121夹紧装配在安装外壳10内部,第二电机121下端固定装配有第二转轴122,第二转轴122下端固定装配有抛光刀具123。
23.抛光刀具123可以通过高速旋转对材料进行抛光处理。
24.侧面固定装置13包括固定板134,固定板134左侧均匀螺接有第一固定螺栓131,第一固定螺栓131贯穿固定板134底部顶在安装外壳10内壁中,固定板134左侧中间螺接有第二固定螺栓133,第二固定螺栓133右端转动装配有压紧板132,压紧板132右端顶接在电机121上。
25.先拆下侧面固定装置13,然后横向将插入抛光装置12插入安装外壳10中,利用电动伸缩杆8推动推板9,将第二电机121压紧,再将侧面固定装置13螺接到安装外壳10上,通过旋转第二固定螺栓133,推动压紧板132,将第二电机121完全固定。
26.使机器人上的抛光装置12变得可拆卸,更换,有利于进行维护,在需要更大功率的第二电机121时,也可以进行更换。
27.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
28.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。