1.本发明涉及水利技术领域,特别是涉及一种水上漂浮物的收集设备及收集方法。
背景技术:
2.目前,国内传统的水面漂浮物清漂设备,其水面漂浮物的收集设备的宽度方向两侧均设置有挡料板,虽然两侧挡料板可以保证输送带台面上的漂浮物不从两侧掉落,但是其弊端也很明显,特别是对于尺寸较长的横向漂浮物,如:长竹竿、长树干类,不能一次全部打捞,只能打捞与清漂设备行进方向大致相同的长漂浮物,对于部分与清漂设备行进方向垂直或接近于垂直的较长漂浮物则不能直接打捞,只有通过人工或清漂设备转向将长漂浮物摆弄到与清漂船行进方向大致相同再进行打捞,打捞效率较低。
3.现有技术中,提出了公开号为cn112252291a,公开日为2021年01月22日的中国发明专利文件,来解决上述存在的技术问题,该专利文献所公开的技术方案如下:一种水面漂浮物清漂船,船体上有打捞装置,所述打捞装置上设有锯切装置和导料装置,所述导料装置设置在打捞架的前端,且导料装置分别位于打捞网链的两侧;所述导料装置包括调节组件和导料板,调节组件控制导料板动作,使导料板与打捞网链在同一正投影面内向上交错或在同一正投影面内不向上交错;所述锯切装置通过打捞架设置在导料装置的后端用于限位和切断横向长漂浮物。
4.上述技术方案在实际使用过程中,会出现以下问题:该打捞装置只有一条输送用的打捞网链,锯切装置和导料装置都设置在打捞装置上,打捞网链将超出其宽度的横向长漂浮物输送到导料装置后,锯切装置才由上往下摆动切割长漂浮物,这期间打捞网链一直在向上运行,由于打捞网链上安装有用于收集漂浮物的立齿,立齿方向垂直与打捞网链台面,所以长漂浮物还未被切断便会和打捞网链的立齿发生碰撞并损坏立齿,另外,停留在导料板上的漂浮物,例如树枝,经常会卡入打捞网链的空隙内,造成打捞网链损毁,并且还需停机将树枝取出,大大降低了收集网链的收集效率。如若在切割长漂浮物时停止打捞网链的向上运行,其设备的收集效率也会大大降低。
技术实现要素:
5.为解决上述技术问题,本发明提出了一种水上漂浮物的收集设备及收集方法,通过采用相互独立运转的打捞网链和输送网链,能有效解决现有技术对横向漂浮物打捞难、打捞网链容易损坏和设备收集效率较低的问题。
6.本发明是通过采用下述技术方案实现的:一种水上漂浮物的收集设备,包括机架,其特征在于:所述机架上设有打捞装置、喂料装置、切料装置和输送装置;所述打捞装置包括打捞网链和用于驱动打捞网链运转的第一驱动件,所述输送装置包括输送网链和用于驱动输送网链运转的第二驱动件;所述打捞网链和输送网链相互独立运转;所述喂料装置安装于打捞装置的末端,切料装置位于喂料装置的后端,所述喂料装置直接将超出打捞网链宽度的长漂浮物带走,使其快速脱离打
捞网链台面并送入切料装置处进行切割,切割后的漂浮物直接掉入输送网链的台面上。
7.所述喂料装置包括喂料盘和驱动喂料盘旋转的喂料液压马达;所述切料装置包括刀盘和驱动刀盘旋转的电动机;所述喂料装置和切料装置的数量都设有两个,分别位于机架两侧。
8.所述喂料盘的外周上设有若干卡槽。
9.所述喂料盘的外周上设有若干轮齿,相邻两个轮齿之间形成卡槽;每个轮齿都包括依次平滑连接的第一倾斜边、第二倾斜边和直角边。
10.所述第一驱动件包括主动轴、从动轴和驱动主动轴旋转的打捞装置液压马达;所述喂料盘套设在第一驱动件的主动轴上,所述喂料盘上还连接有链轮,所述喂料液压马达通过第一传动链条与链轮相连,用于带动喂料盘独立运转。
11.所述打捞网链位于输送网链的上方,且所述输送网链与打捞网链在同一水平面上的投影有重合。
12.所述输送网链靠打捞网链一侧的端部上方还设有限位板,所述限位板的下表面和输送网链的上表面之间设有间距。
13.所述打捞网链两侧无挡板。
14.一种水上漂浮物的收集方法,其特征在于:打捞网链和输送网链相互独立运转,然后将收集设备下倾,使得收集设备与水面形成夹角,收集设备前端的打捞网链端部沉入水下,第一驱动件带动打捞网链做回转运动并将漂浮物从水中收集到打捞网链台面上,打捞网链将漂浮物继续向上输送;对于横向宽度未超出打捞网链宽度的漂浮物,打捞网链将其输送到末端后直接掉落到输送网链的台面上;对于横向宽度超过打捞网链宽度的长漂浮物,输送至打捞网链末端时,喂料装置直接将该长漂浮物带走,使其快速脱离打捞网链台面并送入切料装置的刀盘处进行切割,切割后的漂浮物直接掉落到输送网链上;最后输送网链将落入其台面上的漂浮物继续向上输送。
15.与现有技术相比,本发明的有益效果表现在:1、通过本收集设备,保证了所有漂浮物的一次性打捞,大大减少了传统清漂设备因横向长漂浮物挡在收集设备挡料板前端,而需要通过人工或清漂设备转向将横向长漂浮物摆弄到与清漂设备行进方向大致相同再进行打捞所浪费的时间,提高了清漂设备的收集效率。
16.本发明中,所述打捞网链和输送网链相互独立运转,喂料装置和切料装置位于打捞装置和输送装置之间,切割没有在打捞网链上进行,漂浮物不会在打捞网链和输送网链上停留,漂浮物也不容易卡入打捞网链的空隙内。所述喂料装置安装于打捞装置的末端,且喂料装置直接将超出打捞网链宽度的长漂浮物带走,使其快速脱离打捞网链台面并送入切料装置处进行切割,喂料盘可快速的将长漂浮物远离打捞网链,避免长漂浮物与打捞网链立齿发生碰撞而造成立齿损坏。
17.2、本发明中,喂料装置和切料装置的数量都设有两个,分别位于机架两侧,对装置的固定和漂浮物的切割效果更好。
18.3、所述喂料盘的外周上设有若干卡槽,所述卡槽能将长漂浮物卡入其内,并通过旋转,快速的将长漂浮物远离打捞网链,送至切料装置出进行切割。
19.4、所述喂料盘的外周上设有若干轮齿,相邻两个轮齿之间形成卡槽;每个轮齿都
包括依次平滑连接的第一倾斜边、第二倾斜边和直角边,当直角边与打捞装置平行时,长漂浮物能顺着该直角边进入卡槽,随着喂料盘的旋转,带动长漂浮物旋转并向下移动。该结构的设置,使得长漂浮物的出入都是顺畅的。
20.5、所述喂料盘设置在主动轴上,通过对应的传动链条实现连接,使得喂料装置安装于打捞装置的末端,结构布置更加精巧。同时,通过该结构,使得喂料盘和主动轴为异步转动,保证了长漂浮物的顺利切割,避免了喂料盘转动过快损坏切料装置的刀盘,延长喂料盘的使用寿命。
21.6、所述打捞网链位于输送网链的上方,且所述输送网链与打捞网链在同一水平面上有重合,使得输送网链能更全面的收集从打捞网链上掉落的漂浮物。
22.7、所述输送网链靠打捞网链一侧的端部上方还设有限位板,所述限位板的下表面和输送网链的上表面之间设有间距,限位板的设置,能起良好的阻挡作用,能避免漂浮物从输送网链的下部掉出。
23.8、所述打捞网链两侧无挡板,使得打捞超出打捞网链宽度的横向长漂浮物时没有障碍。
24.9、通过本收集方法,能实现打捞网链的连续工作且长漂浮物不会损坏打捞网链。
附图说明
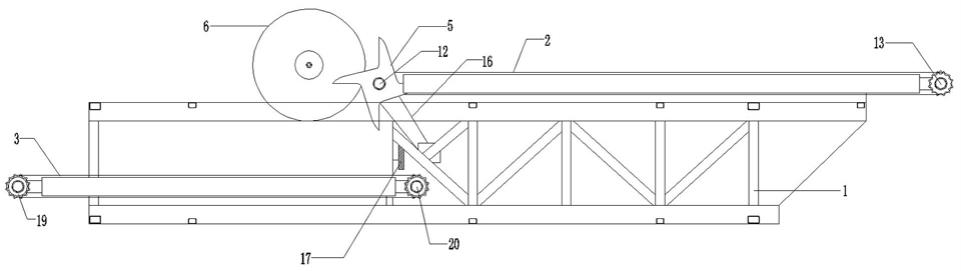
25.下面将结合说明书附图和具体实施方式对本发明作进一步的详细说明,其中:图1为本发明的立面结构示意图;图2为本发明的平面结构示意图;图3为本发明中收集设备在收集状态时的示意图;图4为本发明中收集设备与载体的连接结构示意图;图5为本发明中喂料盘的结构示意图;图中标记:1、机架,2、打捞网链,3、输送网链,4、喂料液压马达,5、喂料盘,6、刀盘,7、电动机,8、轮齿,9、第一倾斜边,10、第二倾斜边,11、直角边,12、主动轴,13、从动轴,14、打捞装置液压马达,15、链轮,16、第一传动链条,17、限位板,18、输送装置液压马达,19、输送装置驱动轴,20、输送装置从动轴,21、载体。
具体实施方式
26.实施例1作为本发明基本实施方式,本发明包括一种水上漂浮物的收集设备,包括固定在载体21上的机架1,所述载体21可以为船体。所述机架1上设有打捞装置、喂料装置、切料装置和输送装置。所述打捞装置包括打捞网链2和用于驱动打捞网链2运转的第一驱动件,所述输送装置包括输送网链3和用于驱动输送网链3运转的第二驱动件,使得所述打捞网链2和输送网链3相互独立运转。所述喂料装置安装于打捞装置的末端,切料装置位于喂料装置的后端。本实施例并不限于喂料装置和切料装置的结构,只要该喂料装置能直接将超出打捞网链2宽度的长漂浮物带走,使其脱离打捞网链2台面并送入切料装置处进行切割即可,切割后的漂浮物直接掉入输送网链3的台面上,继续输送。
27.实施例2作为本发明一较佳实施方式,本发明包括一种水上漂浮物的收集设备,包括机架1。所述机架1上设有打捞装置、喂料装置、切料装置和输送装置。所述打捞装置包括打捞网链2和用于驱动打捞网链2运转的第一驱动件,所述输送装置包括输送网链3和用于驱动输送网链3运转的第二驱动件,使得所述打捞网链2和输送网链3相互独立运转。
28.所述喂料装置包括喂料盘5和驱动喂料盘5旋转的喂料液压马达4。所述喂料盘5的外周上设有卡槽,所述卡槽用于卡入长漂浮物,并带动长漂浮物运转。所述切料装置包括刀盘6和驱动刀盘6旋转的电动机7。所述喂料装置和切料装置的数量都设有两个,分别位于机架1两侧。
29.所述喂料装置安装于打捞装置的末端,喂料盘5可快速的将长漂浮物带走,使其远离打捞网链2,避免长漂浮物与打捞网链2立齿发生碰撞而造成立齿损坏。切料装置位于喂料装置的后端。打捞装置将超出打捞网链2宽度长漂浮物输送到打捞网链2末端时,所述喂料装置直接将超出打捞网链2宽度的长漂浮物带走,使其脱离打捞网链2台面并送入切料装置处进行切割,切割后的漂浮物直接掉入输送网链3的台面上,对于未超出打捞网链2宽度的漂浮物,打捞网链2直接将其输送末端并掉入下面的输送装置台面上。
30.实施例3作为本发明另一较佳实施方式,本发明包括一种水上漂浮物的收集设备,包括机架1,所述机架1上设有打捞装置、喂料装置、切料装置和输送装置。所述打捞装置包括打捞网链2和用于驱动打捞网链2运转的第一驱动件,所述输送装置包括输送网链3和用于驱动输送网链3运转的第二驱动件,使得所述打捞网链2和输送网链3相互独立运转。所述打捞网链2位于输送网链3的上方,且所述输送网链3与打捞网链2在同一水平面上的投影有重合。所述打捞网链2两侧无挡板,所述输送网链3两侧可以设置挡板,并且可以在所述输送网链3靠打捞网链2一侧的端部上方还设有限位板17,所述限位板17的下表面和输送网链3的上表面之间设有间距,避免漂浮物从输送网链3的下部掉落。
31.所述喂料装置安装于打捞装置的末端,切料装置位于喂料装置的后端,所述喂料装置直接将超出打捞网链2宽度的长漂浮物带走,使其脱离打捞网链2台面并送入切料装置处进行切割,切割后的漂浮物直接掉入输送网链3的台面上。
32.实施例4作为本发明最佳实施方式,本发明包括一种水上漂浮物的收集设备,包括固定在载体21上的机架1,参照说明书附图4,所述载体21可以为船体。参照说明书附图1,所述机架1上设有打捞装置、喂料装置、切料装置和输送装置。参照说明书附图3,所述打捞装置包括打捞网链2和用于驱动打捞网链2运转的第一驱动件,所述第一驱动件包括主动轴12、从动轴13和驱动主动轴12旋转的打捞装置液压马达14。所述输送装置包括输送网链3和用于驱动输送网链3运转的第二驱动件,所述第二驱动件可以包括输送装置驱动轴19、输送装置从动轴20和用于驱动输送装置驱动轴19旋转的输送装置液压马达18,使得所述打捞网链2和输送网链3相互独立运转。
33.所述输送网链3和打捞网链2都固定在同一机架1上,所述输送网链3位于打捞网链2下方,且两者的输送方向相同,都为向上输送。所述输送网链3与打捞网链2在同一水平面上的投影有重合。所述打捞网链2两侧无挡板,输送网链3两侧可以有挡板也可以不设挡板。
输送网链3靠打捞网链2一侧的端部上方还设有限位板17,所述限位板17的下表面和输送网链3的上表面之间设有间距,使得限位板17不会影响输送网链3的运转,但是当漂浮物受到的作用力大于输送网链3的传输力时,漂浮物顺着输送网链3向下移动,被限位板17抵挡,卸掉所受的向下作用力,最后在输送网链3的传输力的作用下,向上输送。
34.所述喂料装置包括喂料盘5和驱动喂料盘5旋转的喂料液压马达4。参照说明书附图5,所述喂料盘5的外周上设有若干轮齿8,相邻两个轮齿8之间形成卡槽,为了使得长漂浮物进出卡槽更加顺畅,每个轮齿8都包括依次平滑连接的第一倾斜边9、第二倾斜边10和直角边11。所述切料装置包括刀盘6和驱动刀盘6旋转的电动机7。所述喂料装置和切料装置的数量都设有两个,分别位于机架1两侧。更为具体的,所述喂料盘5可以套设在第一驱动件的主动轴12上,所述喂料盘5上还连接有链轮15,所述喂料液压马达4通过第一传动链条16与链轮15相连,用于带动喂料盘5独立运转。为了使得结构设置更加合理,即错位布置,打捞装置液压马达14也可以通过第二传动链条带动主动轴12旋转。所述刀盘6可以通过支座与机架1相连。
35.安装完成后,所述喂料装置安装于打捞装置的末端,切料装置位于喂料装置的后端,使得喂料盘5可快速的将长漂浮物带走,使其远离打捞网链2,避免长漂浮物与打捞网链2立齿发生碰撞而造成立齿损坏,并且也不会发生漂浮物停留在输送网链3,导致漂浮物卡入打捞网链2的空隙内的状况发生。
36.通过该收集设备能实现水上漂浮物的收集,具体方法为:将船体移动至需要收集的区域,使得打捞网链2和输送网链3相互独立运转,参照说明书附图2,将收集设备下倾,收集设备与水面形成一定的夹角,收集设备前端的打捞网链2端部沉入水下一定深度,打捞装置液压马达14工作,带动主动轴12和从动轴13旋转,打捞网链2在主动轴12和从动轴13的旋转下做回转运动,并将漂浮物从水中收集到打捞网链2的台面上,打捞网链2将漂浮物继续向上输送。
37.对于横向宽度未超出打捞网链2宽度的漂浮物,打捞网链2将其输送到末端后直接掉落到输送网链3的台面上。对于横向宽度超过打捞网链2宽度的长漂浮物,输送至打捞网链2末端时,长漂浮物进入圆周旋转的喂料盘5的卡槽内,喂料盘5直接将长漂浮物带走,使其脱离打捞网链2台面并送入切料装置的刀盘6处进行切割,切割后的漂浮物直接掉落到输送网链3上。
38.最后输送网链3将落入其台面上的漂浮物继续向上输送至船体上的输送件或储料箱内。
39.通过本收集方法,打捞网链2可实现连续工作且长漂浮物不会损坏打捞网链2。
40.综上所述,本领域的普通技术人员阅读本发明文件后,根据本发明的技术方案和技术构思无需创造性脑力劳动而作出的其他各种相应的变换方案,均属于本发明所保护的范围。