1.本实用新型涉及工程机械技术领域,尤其涉及一种履带式推土机。
背景技术:
2.挖掘机在挖掘方面优势明显,但是在装料、运输、卸料的转运环节存在斗容小及机动性差的不足,从而导致挖掘机在转运环节效率低下。传统的轮式装载机在转运方面比挖掘机高效,但是在湿地或者松软土方的工况下进行作业时,自身牵引力小,容易陷车。在岩石比重较大的矿山或者采石场,装载机的橡胶轮胎易磨损,反铲挖掘机的装卸效率低,而正铲挖掘机价格成本高。如果采用推土机、挖掘机、装载机联合作业,施工成本高。
3.因此,亟需一种能够实现挖掘和装载的履带式推土机,以解决现有技术中存的上述技术问题。
技术实现要素:
4.本实用新型的目的在于提出一种履带式推土机,该履带式推土机兼具推土、挖掘及装载的功能,降低了施工成本;且履带式推土机具有低接地比压、大牵引力、爬坡能力强的特点;适用于岩石比重大的矿山和采石场。
5.为达此目的,本实用新型采用以下技术方案:
6.一种履带式推土机,包括:
7.推土机主体;
8.履带式行走机构,设置于所述推土机主体的底部;
9.驾驶室,设置于所述推土机主体上;
10.工作机构,包括提升臂和铲斗,所述提升臂一端铰接于所述推土机主体,另一端铰接于所述铲斗上;
11.动力机构,包括第一伸缩驱动件和第二伸缩驱动件,所述第一伸缩驱动件一端与所述推土机主体铰接,另一端与所述提升臂铰接,所述第一伸缩驱动件通过伸缩能够驱动所述提升臂上升或下降;所述第二伸缩驱动件一端与所述提升臂铰接,另一端与所述铲斗铰接,所述第二伸缩驱动件通过伸缩能够驱动所述铲斗翻转。
12.作为一种履带式推土机的优选技术方案,所述动力机构还包括:
13.第三伸缩驱动件,一端与所述提升臂连接,另一端与所述第二伸缩驱动件铰接;所述第三伸缩驱动件通过伸缩能够驱动所述铲斗上升或下降。
14.作为一种履带式推土机的优选技术方案,所述工作机构还包括:
15.导向杆,一端滑动伸缩连接于所述提升臂上,所述第三伸缩驱动件的另一端与所述导向杆的另一端连接,所述第二伸缩驱动件铰接于所述导向杆的另一端上。
16.作为一种履带式推土机的优选技术方案,所述第三伸缩驱动件为第三液压缸。
17.作为一种履带式推土机的优选技术方案,所述工作机构还包括:
18.前臂,一端与所述提升臂连接,另一端与所述铲斗铰接;所述第二伸缩驱动件一端
与所述前臂铰接。
19.作为一种履带式推土机的优选技术方案,所述前臂包括一体成型的第一连接臂和第二连接臂,所述第一连接臂和所述第二连接臂呈钝角连接,所述第一连接臂与所述提升臂连接,所述第二连接臂与所述铲斗铰接。
20.作为一种履带式推土机的优选技术方案,所述前臂为中空结构,所述前臂的中空结构处设置有加强筋。
21.作为一种履带式推土机的优选技术方案,所述第一伸缩驱动件为第一液压缸;所述第二伸缩驱动件为第二液压缸。
22.作为一种履带式推土机的优选技术方案,所述铲斗的刀刃呈“m”型。
23.作为一种履带式推土机的优选技术方案,所述推土机主体包括液压驱动系统,所述液压驱动系统与所述履带式行走机构连接。
24.本实用新型提供了一种履带式推土机,该履带式推土机包括推土机主体、履带式行走机构、驾驶室、工作机构和动力机构,履带式行走机构相较于轮式行走机构具有低接地比压、大牵引力、爬坡能力强的特点;并且履带式行走机构的耐磨金属底盘相较于橡胶轮胎更适合岩石比重大的矿山和采石场;第一伸缩驱动件和第二伸缩驱动件均处于收缩状态时,铲斗处于推土的状态,通过履带式行走机构的移动,可带动铲斗推土;当第二伸缩驱动件伸出时,铲斗翻转,铲斗的刀刃向下倾斜,实现挖掘的功能;当第一伸缩驱动件伸缩时,能够驱动提升臂上升或下降,从而使得铲斗上升或下降,配合第二伸缩驱动件使得铲斗翻转,实现推土机的装载功能。
附图说明
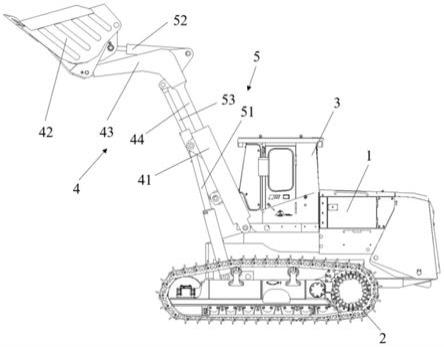
25.图1是本实用新型具体实施方式提供的一种状态下的履带式推土机的侧视图;
26.图2是本实用新型具体实施方式提供的另一种状态下的履带式推土机的侧视图。
27.附图标记:
28.1、推土机主体;2、履带式行走机构;3、驾驶室;
29.4、工作机构;41、提升臂;42、铲斗;43、前臂;44、导向杆;
30.5、动力机构;51、第一液压缸;52、第二液压缸;53、第三液压缸。
具体实施方式
31.为使本实用新型解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
32.在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
33.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第
一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
34.在本实施例的描述中,术语“上”、“下”、“左”、“右”等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
35.如图1和图2所示,本实施例提供了一种履带式推土机,该履带式推土机包括推土机主体1、履带式行走机构2、驾驶室3、工作机构4和动力机构5,其中,履带式行走机构2设置于推土机主体1的底部;驾驶室3设置于推土机主体1上;工作机构4和动力机构5均布置于驾驶室3的前侧;工作机构4包括提升臂41和铲斗42,提升臂41一端铰接于推土机主体1,另一端铰接于铲斗42上;动力机构5包括第一伸缩驱动件和第二伸缩驱动件,第一伸缩驱动件一端与推土机主体1铰接,另一端与提升臂41铰接,第一伸缩驱动件通过伸缩能够驱动提升臂41上升或下降;第二伸缩驱动件一端与提升臂41铰接,另一端与铲斗42铰接,第二伸缩驱动件通过伸缩能够驱动铲斗42翻转。
36.履带式行走机构2相较于轮式行走机构具有低接地比压、大牵引力、爬坡能力强的特点,使得履带式推土机在湿地或者软土作业时,不容易发生陷车的现象,低接地比压为履带式推土机强劲的装载能力提供了保障;并且履带式行走机构2的耐磨金属底盘相较于橡胶轮胎更适合岩石比重大的矿山和采石场,降低了维修成本;第一伸缩驱动件和第二伸缩驱动件均处于收缩状态时,铲斗42处于推土的状态,通过履带式行走机构2的移动,可带动铲斗42推土;当第二伸缩驱动件伸出时,铲斗42翻转,铲斗42的刀刃向下倾斜,实现挖掘的功能;当第一伸缩驱动件伸出且第二伸缩驱动件缩回时,提升臂41上升,铲斗42跟随上升,当到达卸载区后,第二伸缩驱动件伸出,铲斗42翻转,完成卸料,第一伸缩驱动件缩回,提升臂41带动铲斗42下降,实现履带式推土机的装载功能。
37.优选地,第一伸缩驱动件为第一液压缸51;第二伸缩驱动件为第二液压缸52。
38.优选地,工作机构4还包括前臂43,前臂43一端与提升臂41连接,另一端与铲斗42铰接;第二伸缩驱动件一端与前臂43铰接。具体地,前臂43包括一体成型的第一连接臂和第二连接臂,第一连接臂和第二连接臂呈钝角连接,第一连接臂与提升臂41连接,第二连接臂与铲斗42铰接。前臂43为中空结构,前臂43的中空结构处设置有加强筋,提高了前臂43的结构强度。
39.优选地,动力机构5还包括第三伸缩驱动件,工作机构4还包括导向杆44,提升臂41内设有中空的腔室,导向杆44的一端滑动伸缩连接于提升臂41的中空腔室内,另一端与前臂43连接;第三伸缩驱动件一端与提升臂41铰接,另一端与前臂43连接,第三伸缩驱动件通过伸缩能够驱动前臂43上升或下降,以带动铲斗42上升或下降,当第三伸缩驱动件伸缩时,导向杆44在提升臂41的中空的腔室内伸缩滑动,起到导向的作用。当第三伸缩驱动件收缩时,导向杆44会缩回至提升臂41的中空的腔室内,有效的节省空间。第三伸缩驱动件配合第一伸缩驱动件,实现对前臂43的二级提升,双提升件的设置方式,不仅能够为履带式推土机提供可控的卸载高度,而且有利于缩短履带式推土机的整机长度,保证整机的推土稳定性。在本实施例中,第三伸缩驱动件为第三液压缸53。
40.优选地,铲斗42的刀刃呈“m”型,使得铲斗42的刀刃适用于推土、装载及挖掘的功能。
41.优选地,推土机主体1包括液压驱动系统,液压驱动系统与履带式行走机构2连接,液压驱动系统控制履带式行走机构2行走,使得履带式推土机的机动性更好,能够实现无级变速、转向及原地反转的功能。
42.推土机主体1还包括发动机、散热水箱及温控风扇等结构,其均布置于驾驶室3的后方。推土机主体1还包括燃油箱和工作油箱,其均布置于驾驶室3的前侧。
43.以上内容仅为本实用新型的较佳实施例,对于本领域的普通技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本实用新型的限制。