1.本发明涉及展厅引导控制系统技术领域,具体是一种展厅引导控制系统及其讲解机器人的对接方法。
背景技术:
2.目前智能家居,多功能多媒体展厅展馆发展迅速,所用到的设备电源、灯光以及设备的控制向着无人控制的智能化方向发展,传统控制方式是需要人手动操作,或者单纯通过平板电脑手机等终端和控制系统进行连接,但还是需要手动操作来进行控制,而传统的智能机器人也只能识别人的简单语音指令,对相应的内容进行展现说明。
3.本发明针对本领域现有不足,通过特殊方式把智能引导讲解机器人和控制系统进行连接,以实现通过语音互动指令来控制所有多媒体设备及播放内容的智能管理目的。
技术实现要素:
4.本发明的目的在于提供一种展厅引导控制系统及其讲解机器人的对接方法,以解决上述背景技术中提出的问题。
5.本发明的技术方案是:一种展厅引导控制系统,包括指令系统和讲解机器人,所述指令系统的连接端通过互联网与讲解机器人相连接,所述讲解机器人的连接端通过互联网连接有中控处理器,所述中控处理器的连接端设有终端设备,所述指令系统包括有语音指令和无线终端指令,所述讲解机器人的内部设有语音识别模块、信息读取模块、数据处理模块、数据输出模块、数据存储模块和音频视频提取模块,所述语音识别模块用于识别讲解机器人接收到的语音指令,所述信息读取模块用于读取讲解机器人接收到的无线终端指令,所述数据处理模块用于对语音识别模块识别讲解机器人接收到的语音指令信号和信息读取模块读取讲解机器人接收到的无线终端指令信号进行处理,所述数据输出模块用于输出执行对接指令发送,所述音频视频提取模块用于提取音频视频信息。
6.优选的,所述数据存储模块包括有原有文本信息数据存储单元和实时对讲文本信息存储单元,原有文本信息数据存储单元用于存储事先存储和设定的文本信息数据,所述实时对讲文本信息存储单元用于存储实时对讲时的文本信息数据。
7.优选的,所述音频视频提取模块的连接端设有文本转换模块,所述文本转换模块用于讲解机器人对音频视频提取模块提取的文字信息进行转换,所述文本转换模块的连接端设有应答提取模块,所述应答提取模块用于对用户和讲解机器人的应答语音和文本信息进行提取。
8.优选的,所述应答提取模块的连接端设有文本识别模块,所述文本识别模块用于讲解机器人识别文本信息数据,所述文本识别模块的连接端设有语音播报模块,所述语音播报模块用于讲解机器人对文本识别模块识别的文本信息数据进行语音播报。
9.优选的,所述中控处理器内包括有数据接收模块、数据转换模块和数据传输模块,所述数据接收模块用于接收讲解机器人发出的信息指令,所述数据转换模块用于对数据接
收模块接收讲解机器人发出的信息指令进行转换成对应的ascll和hex代码。
10.优选的,所述数据传输模块用于传输指令数据发送给需要控制的终端设备,所述数据传输模块的方式为telnet协议、tcp协议、udp协议、http协议、pjlink协议、onvif协议中的一种或多种。
11.优选的,一种展厅引导控制系统的讲解机器人对接方法,包括有如下步骤:
12.步骤一:首先讲解机器人通过语音识别模块和信息读取模块分别识别讲解机器人接收到的语音指令和无线终端指令,然后通过数据处理模块对语音识别模块识别讲解机器人接收到的语音指令信号和信息读取模块读取讲解机器人接收到的无线终端指令信号进行处理;
13.步骤二:然后数据处理模块根据语音指令信号和无线终端指令信号数据通过输出模块输出执行对接指令发送;
14.步骤三:然后通过文本转换模块对讲解机器人对音频视频提取模块提取的文字信息进行转换,通过应答提取模块对用户和讲解机器人的应答语音和文本信息进行提取,通过文本识别模块来讲解机器人识别文本信息数据,最后通过语音播报模块使得讲解机器人对文本识别模块识别的文本信息数据进行语音播报;
15.步骤四:然后中控处理器内的数据接收模块接收讲解机器人发出的信息指令,再通过数据转换模块对数据接收模块接收讲解机器人发出的信息指令进行转换成对应的ascll和hex代码;
16.步骤五:最后通过数据传输模块传输指令数据发送给需要控制的终端设备,使得所控终端设备进行相应的执行和操作。
17.本发明通过改进在此提供一种展厅引导控制系统及其讲解机器人的对接方法,与现有技术相比,具有如下改进及优点:
18.本发明无论是语音指令还是平板电脑指令,都可以快速处理与对接,可以解放双手,方便快捷的对相关设备进行控制,引导讲解机器人和控制系统之间经过专用加密传输,安全可靠,应用领域非常广泛,无论是智能家居,多媒体会议室,指挥调度中心,智能展厅展馆,都可以完美应用。
附图说明
19.下面结合附图和实施例对本发明作进一步解释:
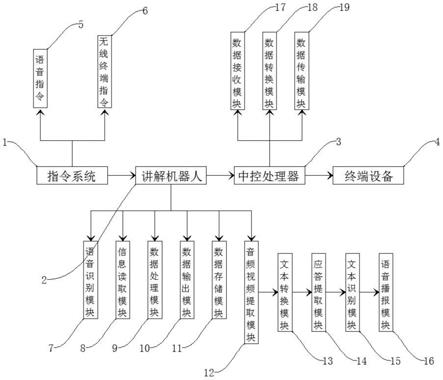
20.图1是本发明的整体系统结构流程示意图;
21.图2是本发明的数据存储模块内部结构示意图。
22.附图标记说明:
23.1、指令系统;2、讲解机器人;3、中控处理器;4、终端设备;5、语音指令;6、无线终端指令;7、语音识别模块;8、信息读取模块;9、数据处理模块;10、数据输出模块;11、数据存储模块;12、音频视频提取模块;13、文本转换模块;14、应答提取模块;15、文本识别模块;16、语音播报模块;17、数据接收模块;18、数据转换模块;19、数据传输模块;20、实时对讲文本信息存储单元;21、原有文本信息数据存储单元。
具体实施方式
24.下面对本发明进行详细说明,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.本发明通过改进在此提供一种展厅引导控制系统及其讲解机器人的对接方法,本发明的技术方案是:
26.实施例一:
27.如图1-图2所示,一种展厅引导控制系统,包括指令系统1和讲解机器人2,所述指令系统1的连接端通过互联网与讲解机器人2相连接,所述讲解机器人2的连接端通过互联网连接有中控处理器3,所述中控处理器3的连接端设有终端设备4,所述指令系统1包括有语音指令5和无线终端指令6,所述讲解机器人2的内部设有语音识别模块7、信息读取模块8、数据处理模块9、数据输出模块10、数据存储模块11和音频视频提取模块12,所述语音识别模块7用于识别讲解机器人2接收到的语音指令5,所述信息读取模块8用于读取讲解机器人2接收到的无线终端指令6,所述数据处理模块9用于对语音识别模块7识别讲解机器人2接收到的语音指令5信号和信息读取模块8读取讲解机器人2接收到的无线终端指令6信号进行处理,所述数据输出模块10用于输出执行对接指令发送,所述音频视频提取模块12用于提取音频视频信息。
28.进一步的,在上述技术方案中,所述数据存储模块11包括有原有文本信息数据存储单元21和实时对讲文本信息存储单元20,原有文本信息数据存储单元21用于存储事先存储和设定的文本信息数据,所述实时对讲文本信息存储单元20用于存储实时对讲时的文本信息数据。
29.进一步的,在上述技术方案中,所述音频视频提取模块12的连接端设有文本转换模块13,所述文本转换模块13用于讲解机器人2对音频视频提取模块12提取的文字信息进行转换,所述文本转换模块13的连接端设有应答提取模块14,所述应答提取模块14用于对用户和讲解机器人2的应答语音和文本信息进行提取。
30.进一步的,在上述技术方案中,所述应答提取模块14的连接端设有文本识别模块15,所述文本识别模块15用于讲解机器人2识别文本信息数据,所述文本识别模块15的连接端设有语音播报模块16,所述语音播报模块16用于讲解机器人2对文本识别模块15识别的文本信息数据进行语音播报。
31.进一步的,在上述技术方案中,所述中控处理器3内包括有数据接收模块17、数据转换模块18和数据传输模块19,所述数据接收模块17用于接收讲解机器人2发出的信息指令,所述数据转换模块18用于对数据接收模块17接收讲解机器人2发出的信息指令进行转换成对应的ascll和hex代码。
32.进一步的,在上述技术方案中,所述数据传输模块19用于传输指令数据发送给需要控制的终端设备4,所述数据传输模块19的方式为telnet协议、tcp协议、udp协议、http协议、pjlink协议、onvif协议中的一种或多种。
33.本实施例还提供一种展厅引导控制系统的讲解机器人对接方法,包括有如下步骤:
34.步骤一:首先讲解机器人2通过语音识别模块7和信息读取模块8分别识别讲解机器人2接收到的语音指令5和无线终端指令6,然后通过数据处理模块9对语音识别模块7识别讲解机器人2接收到的语音指令5信号和信息读取模块8读取讲解机器人2接收到的无线终端指令6信号进行处理;
35.步骤二:然后数据处理模块9根据语音指令5信号和无线终端指令6信号数据通过输出模块输出执行对接指令发送;
36.步骤三:然后通过文本转换模块13对讲解机器人2对音频视频提取模块12提取的文字信息进行转换,通过应答提取模块14对用户和讲解机器人2的应答语音和文本信息进行提取,通过文本识别模块15来讲解机器人2识别文本信息数据,最后通过语音播报模块16使得讲解机器人2对文本识别模块15识别的文本信息数据进行语音播报;
37.步骤四:然后中控处理器3内的数据接收模块17接收讲解机器人2发出的信息指令,再通过数据转换模块18对数据接收模块17接收讲解机器人2发出的信息指令进行转换成对应的ascll和hex代码;
38.步骤五:最后通过数据传输模块19传输指令数据发送给需要控制的终端设备4,使得所控终端设备4进行相应的执行和操作。
39.工作原理:首先讲解机器人2通过语音识别模块7和信息读取模块8分别识别讲解机器人2接收到的语音指令5和无线终端指令6,然后通过数据处理模块9对语音识别模块7识别讲解机器人2接收到的语音指令5信号和信息读取模块8读取讲解机器人2接收到的无线终端指令6信号进行处理,然后数据处理模块9根据语音指令5信号和无线终端指令6信号数据通过输出模块输出执行对接指令发送,然后通过文本转换模块13对讲解机器人2对音频视频提取模块12提取的文字信息进行转换,通过应答提取模块14对用户和讲解机器人2的应答语音和文本信息进行提取,通过文本识别模块15来讲解机器人2识别文本信息数据,最后通过语音播报模块16使得讲解机器人2对文本识别模块15识别的文本信息数据进行语音播报,然后中控处理器3内的数据接收模块17接收讲解机器人2发出的信息指令,再通过数据转换模块18对数据接收模块17接收讲解机器人2发出的信息指令进行转换成对应的ascll和hex代码,最后通过数据传输模块19传输指令数据发送给需要控制的终端设备4,使得所控终端设备4进行相应的执行和操作。
40.上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。