1.本文件涉及一种噪声控制方法和系统。具体地,本文件涉及由用于车辆的子带自适应主动噪声控制(anc)系统实施的噪声控制方法和系统。
背景技术:
2.广泛研究了用于在声学空腔(例如,车辆)内主动控制噪声(例如,道路噪声)的方法和系统。这种方法通常在比如anc系统和主动道路噪声控制(arnc)系统等前馈控制系统的帮助下执行。
3.前馈控制系统通常涉及i)一个或若干个参考传感器,用于检测和/或测量噪声源处的初级噪声;ii)一个或若干个声源,也被称为次级声源,例如现有音频系统的扬声器,用于产生次级噪声以抵消初级噪声;iii)一个或若干个误差传感器,用于检测和/或测量表示初级噪声和次级噪声在声学空腔(例如,车辆驾驶舱)内不同位置处的叠加的误差信号;以及iv)控制电路,通常是数字信号处理器(dsp),用于执行生成控制信号的算法,使得(这些)声源可以由控制信号驱动以生成用于抵消初级噪声的次级噪声。控制信号是通过用自适应滤波器对由(多个)参考传感器生成的参考信号进行滤波来生成的,这些自适应滤波器通过自适应算法、通常是最小均方(lms)算法来更新,以减少由(多个)误差传感器检测和/或测量的初级噪声和次级噪声的叠加,即减少误差信号,或在(多个)误差传感器的位置处的声音信号的平方压力。
4.由于已知道路噪声是宽带噪声,因此自适应滤波器需要许多系数来处理这种宽带噪声。因此,需要强大的控制电路来有效地处理在执行算法时涉及的所有计算。因此,使用这种控制电路的噪声控制方法和系统通常实施起来是昂贵的。
5.进一步地,已知声学空腔内的降噪量受到参考信号与空腔中声场之间的多重相干性的限制。多重相干性是对若干个输入(即由参考传感器生成的参考信号)与一个输出(即某个位置(比如靠近乘客的耳朵或头部的位置)处的声音信号)之间的线性度的度量。多重相干性是对参考信号表征空腔内噪声的程度的度量。因此,anc和/或arnc系统通常需要多于一个参考信号来实现高相干性,并且因此实现高降噪。
6.然而,在系统中使用尽可能多的参考信号也有缺点。
7.首先,由于在执行用于更新自适应滤波器的算法时要处理的参考信号数量增加以及计算操作数量增加,用于实施系统的硬件和软件两者的复杂性都会增加,因此这种方式实施起来是昂贵的。进一步地,由于例如控制电路的物理输入数量增加,用于实施系统的硬件数量会增加,因此这种方式也是昂贵的。
8.第二,收敛速度可能会降低,因为例如用于多输入多输出(mimo)系统的滤波最小均方(fxlms)算法的收敛速度将受到经滤波输入(即参考信号)的自相关矩阵的特征值扩散的强烈影响。也就是说,系统中参考信号的数量越多,自相关矩阵的大小就越大,并且因此,特征值扩散的可能性就越大。
9.因此,一方面,增加的参考信号数量允许汽车中较低的收敛声级,这是所期望的。
另一方面,增加的参考信号数量不仅增加了系统的成本,而且可能使收敛速度变慢,这阻止了算法在比如道路激励等不断变化的噪声环境下的完全收敛。
10.因此,需要提供一种可以提供用于处理变化的噪声环境的快速收敛速度并且实施成本较低的噪声控制方法和系统。
技术实现要素:
11.本发明是由所附独立权利要求限定的。在所附从属权利要求以及以下的说明书和附图中阐述了实施例。
12.根据第一方面,提供了一种噪声控制方法,该噪声控制方法包括:生成表示初级噪声的一个参考信号;响应于控制信号而生成一个次级噪声,用于抵消该初级噪声;生成一个误差信号,该误差信号表示某个位置处的该初级噪声和该次级噪声的叠加。该方法进一步包括:生成至少一个附加参考信号、和/或至少一个附加次级噪声、和/或至少一个附加误差信号;以及通过基于该(这些)参考信号和该(这些)误差信号执行自适应子带滤波算法来生成用于生成该(这些)次级噪声的该(这些)控制信号;其中,生成该(这些)控制信号的步骤包括:对于多个子带中的每个子带,将该(这些)参考信号和该(这些)误差信号分别分解为(多个)子带参考信号和(多个)子带误差信号;基于该多个子带中的至少一个子带的该(这些)子带参考信号的子集和该至少一个子带的该(这些)子带误差信号的子集,针对该至少一个子带更新一个或多个子带自适应滤波器的子集,其中,所述三个子集中的至少一个子集是真子集;基于该(这些)更新的子带自适应滤波器来更新至少一个全频带自适应滤波器;通过由更新的至少一个全频带自适应滤波器对该(这些)参考信号进行滤波来生成该(这些)控制信号。
13.生成至少一个附加参考信号的步骤可以指例如由一个或多个参考传感器生成分别表示一个或多个不同初级噪声的一个或多个附加参考信号。
14.生成至少一个附加次级噪声的步骤可以指分别响应于一个或多个不同的控制信号而例如由一个或多个声源生成一个或多个附加次级噪声。
15.生成至少一个附加误差信号的步骤可以指例如由一个或多个误差传感器生成分别表示在一个或多个不同位置处的(多个)初级噪声和(多个)次级噪声的叠加的一个或多个附加误差信号。
16.本发明概念是仅使用可用资源的一部分来执行自适应子带主动噪声控制。也就是说,例如,可以仅使用多个子带参考信号中的一些而不是全部用于更新子带自适应滤波器。替代性地或组合地,可以仅使用子带误差信号中的一些而不是全部用于更新子带自适应滤波器。替代性地或组合地,可以仅更新子带自适应滤波器中的一些而不是全部。因此,仅系统的一些参考传感器和/或仅系统的一些误差传感器和/或仅系统的一些声源可以是活跃的用于抵消某个噪声。
17.通过选择对噪声控制贡献最大的资源和/或信号,并且仅使用所选资源和/或信号来控制噪声,可以实现充分的噪声抵消,可以减少算法计算的量。因此,可以实现更快的收敛速度用于抵消变化的噪声环境中的噪声。噪声控制方法也可以由更简单且成本更低的处理器来实施。
18.已知自适应子带滤波算法由anc或arnc系统实施,用于更新每个子带上的子带自
适应滤波器。自适应子带滤波算法可以是无延迟子带fxlms算法。
19.这可能是有利的,因为子带自适应滤波器可以基于子带自适应滤波器所属的子带的子带参考信号的子集,优选地真子集,而不是基于子带的所有子带参考信号来更新。也就是说,针对子带处理数量减少的子带参考信号。
20.子带自适应滤波器可以基于子带自适应滤波器所属的子带的子带误差信号的子集,优选地真子集,而不是基于子带的所有子带误差信号来更新。也就是说,针对子带处理数量减少的子带误差信号。
21.因此,可以仅更新一个子带的子带自适应滤波器的一个子集,优选地一个真子集,而不是更新该子带的所有子带自适应滤波器。也就是说,针对子带更新数量减少的子带自适应滤波器。
22.也就是说,对于一个子带,子带参考信号的子集和子带误差信号的子集可以用于更新子带自适应滤波器的子集,其中,所述三个子集中的至少一个子集是真子集。关于子带,每个子带自适应滤波器可以与用于生成次级噪声的相应次级声源相关联,这在确定应该针对子带激活哪些声源时可能是有利的。
23.控制信号的生成不是子带信号处理的一部分。可以通过使用基于更新的子带自适应滤波器重构的全频带自适应滤波器对参考信号进行滤波来生成控制信号。
24.通过仅选择一些可用资源和/或可用信号,可以减少使用自适应子带滤波算法控制宽带噪声的计算负担。因此,为了降低实施成本,可以使用更便宜的控制电路来实施噪声控制方法。
25.这可能是有利的,因为可以提高收敛速度。
26.用于更新子带自适应滤波器的子集的子带参考信号子集和/或子带误差信号子集可以是在声学空腔的声场中物理上最优的子带信号。术语“物理上最优”可以指例如与声学空腔结构的耦合模态激励在物理上最相关的子带信号的子集。例如,与声学空腔内的监测位置处的声学信号最相关(即具有高相干性水平)的子带参考信号被认为在声学空腔的声场中是物理上最佳的。那些与声学空腔结构的耦合模态激励较少物理上相关的子带信号可以被忽略并且不针对控制宽带噪声进行处理,以减少计算负担并且提高收敛速度。
27.一个集合a是另一个集合b的“子集”的关系也被称为包含(inclusion)或有时称为包含(containment)。集合a是集合b的子集意指集合a的所有元素也是集合b的元素。因此,即使当集合a等于集合b时,集合a也是集合b的子集,即集合a和b具有完全相同的元素。例如,如果b={1,3,5},则a={1,3,5}是b的子集。
28.真子集不同于子集的定义。集合b的真子集c是集合b的子集,该真子集c不等于集合b。换句话说,如果集合c是集合b的真子集,那么集合c的所有元素都是集合b的元素。但是集合b包含至少一个不是集合c的元素的元素。例如,如果b={1,3,5},则c={1}是b的真子集。但是a={1,3,5}不是b的真子集。
29.其中,噪声控制方法可以是anc方法,或arnc方法。
30.术语“分解”可以指将全频带信号分成多个子带信号。可以独立地处理多个分解的子带信号。可以通过包括例如一组带通滤波器的滤波器组来实现分解。术语全频带和子带可以是频带或频率范围方面的。因此,全频带信号可以是大频率范围的信号,并且子带信号可以是小频率范围的信号,是大频率范围的间隔。
31.自适应滤波器可以是具有由可变参数控制的传递函数和根据优化算法调整那些参数的装置的系统。
32.术语“全频带自适应滤波器”可以指根据优化算法调整全频带信号的自适应滤波器。这里的全频带信号可以是参考信号、误差信号和控制信号。
33.术语“子带自适应滤波器”可以指根据优化算法调整子带信号的自适应滤波器。这里的子带信号可以是子带参考信号和子带误差信号。
34.该方法可以在汽车、卡车、火车、飞机和任何其他声学空腔内执行。
35.可以提供至少一个参考传感器用于生成表示初级噪声的参考信号。该至少一个参考传感器可以是加速度计、麦克风或转速计。
36.可以提供至少一个声源用于响应于控制信号生成用于抵消初级噪声的次级噪声。该至少一个声源可以是扬声器或振动面板。可以提供至少一个误差传感器用于生成误差信号,该误差信号表示某个位置处的初级噪声和次级噪声的叠加。该至少一个误差传感器可以是麦克风。
37.初级噪声可以是道路噪声、风噪声或引擎噪声。
38.多个子带可以由k个子带组成,k是偶数正整数。该方法可以进一步包括执行针对该多个子带中的t个子带更新一个或多个子带自适应滤波器的子集的步骤,其中,该数量k和t之间的关系为:t=k/2+1。
39.在k个子带中,可以仅更新第一子带。其他个子带仅包含冗余信息。
40.自适应子带滤波算法可以包括滤波器组,该滤波器组包括多个子带,用于分解该(这些)参考信号和该(这些)误差信号。
41.该滤波器组可以是均匀离散傅立叶变换调制(udftm)滤波器组。
42.该方法可以进一步包括:在分解该(这些)参考信号和该(这些)误差信号的步骤之前,用次级路径模型对该(这些)参考信号进行滤波。
43.该方法可以进一步包括:在分解该(这些)参考信号和(多个)误差信号的步骤之后,针对该多个子带中的每个子带,用子带次级路径模型对(多个)子带参考信号进行滤波。
44.该自适应子带滤波算法可以是经过滤波的x最小均方fxlms算法。
45.该fxlms算法可以是无延迟的。
46.针对该多个子带中的该至少一个子带,可以通过使用最小均方lms算法来更新该(这些)子带自适应滤波器的子集。
47.可以通过权重堆叠方案或频率堆叠方案,基于该(这些)更新的子带自适应滤波器来更新该全频带自适应滤波器。
48.该方法可以进一步包括:针对该多个子带中的该至少一个子带,通过优化过程来确定该(这些)子带参考信号的子集和/或该(这些)子带误差信号的子集。
49.(多个)子带参考信号的子集和/或(多个)子带误差信号的子集可以通过用于例如子带的声学空腔的声学模式的最佳空间匹配的优化过程来确定。
50.当该方法应用于车辆时,(多个)子带参考信号的子集和/或(多个)子带误差信号的子集可以基于比如速度范围、路面类型等车辆的操作条件来确定。
51.不同类型的操作条件可以存储在存储器中的表中。
52.优化过程可以是机器学习过程。
53.替代性地或组合地,(多个)子带参考信号的子集和/或(多个)子带误差信号的子集可以基于执行该方法的系统的比如安装在车辆内的anc系统等物理特性来确定。
54.该方法可以进一步包括:基于该(这些)参考信号和/或该(这些)误差信号的统计性质来确定该自适应子带滤波算法的漏泄因数。
55.在lms算法中引入漏泄因数可以用于改进关于例如,病态输入信号、算法在校正项太小时停止、由于有限精度算术导致的溢出等算法性能。在主动噪声控制系统中,在自适应算法中引入漏泄因数可以减弱由于非线性引起的不期望的影响。漏泄因数在例如“kuo,s.m.,和morgan,d.(1995).active noise control systems:algorithms and dsp implementations[主动噪声控制系统:算法和dsp实施].john wiley&sons,inc[约翰威立父子公司]”中定义。
[0056]
(多个)参考信号和/或(多个)误差信号的统计性质可以是(多个)信号的归一化性质。
[0057]
该方法可以进一步包括:基于该(这些)参考信号和/或该(这些)误差信号的统计性质来确定该自适应子带滤波算法的步长。
[0058]
当该方法包括生成至少一个附加参考信号时,该方法可以进一步包括针对该至少一个子带,选择该子带参考信号的子集,包括按以下顺序的步骤:
[0059]
1)计算这些子带参考信号中的每个子带参考信号与输出信号之间的表示该至少一个子带的频率范围内的相干性水平的相干值,
[0060]
其中,该输出信号是以下各项之一:该(这些)误差信号和表示在第二位置测得的声音的信号;
[0061]
2)在这些子带参考信号中,选择具有最大相干值的子带参考信号;
[0062]
3)创建这些子带参考信号的剩余组,其中,这些子带参考信号的剩余组包括除了先前选择的(这些)子带参考信号之外的所有子带参考信号;
[0063]
4)针对该子带参考信号的剩余组中的每个子带参考信号,
[0064]
调节该子带参考信号用于生成对应的调节的子带参考信号;
[0065]
5)针对每个经调节的子带参考信号,
[0066]
计算该经调节的子带参考信号与该输出信号之间的表示该至少一个子带的该频率范围内的相干性水平的部分相干值;
[0067]
6)在该参考信号的剩余组中,选择与具有最大部分相干值的经调节的子带参考信号相对应的子带参考信号。
[0068]
输出信号可以是例如由误差传感器测得的误差信号。
[0069]
输出信号也可以是在例如需要降低声音的位置处测得的任何信号。该位置可以在例如汽车内的驾驶员和/或乘客的耳朵或头部周围。在校准期间,输出信号可以由传感器,例如,现有误差传感器或比如麦克风等不同的传感器生成。
[0070]
第二位置可以是不同于该位置的位置。
[0071]
该方法可以进一步包括重复步骤3)到6),直到子带参考信号剩余组由最后一个子带参考信号组成,并且选择该最后一个子带参考信号。
[0072]
该方法可以进一步包括在选择该最后一个子带参考信号之前,执行步骤4)到5)用
于调节该最后一个子带参考信号并且计算调节的最后一个子带参考信号与输出信号之间的部分相干值。
[0073]
该方法可以进一步包括重复步骤3)到6),直到在步骤5)计算的最大部分相干值小于阈值。
[0074]
该方法可以进一步包括基于每个子带参考信号被选择的顺序对子带参考信号进行排序,使得在步骤2)中选择的子带参考信号具有最高排名。
[0075]
所选子带参考信号的子集包括至少在步骤2)中选择的子带参考信号。
[0076]
调节的子带参考信号与输出信号之间的关系可以是
[0077][0078]
其中,y可以指输出信号,x
i.(i-1)!
可以指由先前选择的(多个)子带参考信号x
i.(i-1)!
调节的子带参考信号xi,l
iy
可以指传递函数,并且n可以是常数。
[0079]
生成调节的子带参考信号x
i.(i-1)!
的步骤4)可以包括根据以下等式,通过先前选择的子带参考信号来调节子带参考信号剩余组中的每个子带参考信号
[0080]
x
i.(i-1)!
=x
i.(i-2)!-l
(i-1)i
x
(i-1)(i-2)!
。
[0081]
术语“调节”可以指以满足下一阶段进一步处理的要求的方式来操纵或处理信号。
[0082]
通过去除子带参考信号之间的冗余,子带参考信号可以以任意顺序布置。也就是说,子带参考信号的顺序在确定其对输出信号的贡献方面可能没有任何作用。
[0083]
该方法可以进一步包括在计算相干值的步骤1)之前,以任意顺序布置子带参考信号。
[0084]
该方法可以进一步包括在计算相干值的步骤1)之前,对子带参考信号和输出信号执行最优最小二乘辨识。
[0085]
根据第二方面,提供了一种噪声控制系统,该系统包括:一个参考传感器,该参考传感器被配置为生成表示初级噪声的一个参考信号;一个声源,该声源被配置为响应于控制信号而生成一个次级噪声,用于抵消该初级噪声;一个误差传感器,该误差传感器被配置为生成一个误差信号,该误差信号表示某个位置处的初级噪声和次级噪声的叠加。该系统进一步包括:附加参考传感器,该附加参考传感器被配置为生成附加参考信号;和/或附加声源,该附加声源被配置为生成附加次级噪声;和/或附加误差传感器,该附加误差传感器被配置为生成附加误差信号;以及控制电路,该控制电路被配置为通过基于该(这些)参考信号和该(这些)误差信号执行自适应子带滤波算法来生成用于生成该(这些)次级噪声的该(这些)控制信号;其中,该控制电路进一步被配置为:对于多个子带中的每个子带,将该(这些)参考信号和该(这些)误差信号分别分解为(这些)子带参考信号和(这些)子带误差信号;基于该多个子带中的至少一个子带的该(这些)子带参考信号的子集和该至少一个子带的该(这些)子带误差信号的子集,针对该至少一个子带更新一个或多个子带自适应滤波器的子集,其中,所述三个子集中的至少一个子集是真子集;基于该(这些)更新的子带自适应滤波器来更新至少一个全频带自适应滤波器;通过由更新的至少一个全频带自适应滤波器对该(这些)参考信号进行滤波来生成该(这些)控制信号。
[0086]
多个子带可以由k个子带组成,k是偶数正整数。该控制电路可以进一步被配置为针对该多个子带中的t个子带更新一个或多个子带自适应滤波器的子集的步骤,其中,该数量k和t之间的关系为:t=k/2+1。
附图说明
[0087]
图1展示了具有anc或arnc系统的汽车的示意图。
[0088]
图2展示了具有anc或arnc系统的汽车的俯视图。
[0089]
图3展示了在anc或arnc系统中实施的无延迟子带fxlms算法的示例。
[0090]
图4展示了噪声控制系统的示例。
[0091]
图5展示了噪声控制系统的示例。
[0092]
图6a展示了miso系统的示例。
[0093]
图6b展示了图6a的miso系统的等效物。
[0094]
图7展示了用于对多个输入进行排序的程序。
[0095]
图8展示了降噪测量结果的四个图。
[0096]
图9展示了降噪测量结果的四个图。
[0097]
图10a至图10c展示了测得的spl值的图。
[0098]
图11a至图11c展示了测得的spl值的图。
[0099]
图12展示了用于定义函数∈
(k)
和/或ψ
(k)
的方法的示例。
[0100]
图13展示了测得的spl值的图。
[0101]
图14展示了函数χ
(k)
的示例。
[0102]
图15展示了不同anc方法的每样本乘法数量的图。
具体实施方式
[0103]
图1至图2分别展示了具有anc或arnc系统的汽车的示意图和俯视图。图中示出的参考传感器、声源和误差传感器的数量仅是说明性示例。
[0104]
在图1至图2中,系统包括l
x
个参考传感器1、ly个声源3、le个误差传感器4和控制电路2。
[0105]
声源3可以是致动器,比如扬声器或振动表面,例如有源面板。
[0106]
误差传感器4可以是例如放置在声学空腔(比如图1至图2中示出的汽车驾驶舱)内的麦克风。误差传感器4可以靠近驾驶员的或乘客的耳朵或头部放置。
[0107]
参考传感器1可以是例如靠近噪声源放置的加速度计。例如,这些参考传感器可以放置在汽车车轮周围的汽车底盘上,如图1中示出的。替代性地,参考传感器1可以放置在汽车驾驶舱内。参考传感器1可以是用于表征声场的激励或结构的激励的任何其他类型的传感器。
[0108]
参考传感器1、误差传感器4和声源3可以分别与控制单元2并联连接,如图1至图2中示出的。参考传感器1、误差传感器4、声源3和控制电路2可以通过有线连接或无线地连接。
[0109]
控制电路2在图1至图2中示出为汽车外部的实体。然而,控制单元可以在汽车内,例如,作为车辆系统的一部分。
[0110]
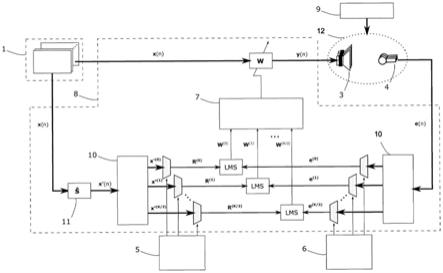
图3展示了在anc或arnc系统中实施的已知的无延迟子带fxlms算法的示例。
[0111]
图3中示出的方法可以在以下文献中找到:例如,[1]cheer,j.,和daley,s.(2017),an investigation of delayless subband adaptive filtering for multi-input multi-output active noise control applications[用于多输入多输出主动噪声
控制应用的无延迟子带自适应滤波的调查].ieee/acm transactions on audio,speech,and language processing[ieee/acm音频、语音和语言处理事务],25(2),359-373;和[2]milani,a.a.,panahi,i.m.,和loizou,p.c.(2009),a new delayless subband adaptive filtering algorithm for active noise control systems[用于主动噪声控制系统的新的无延迟子带自适应滤波算法].ieee transactions on audio,speech,and language processing[ieee音频、语音和语言处理事务],17(5),1038-1045。
[0112]
在图3中,系统包括l
x
个参考传感器1、ly个声源3、le个误差传感器4和由控制电路(未示出)执行的自适应子带滤波算法8。l
x
个参考传感器1分别生成l
x
个参考信号x(n),这些参考信号可以用向量符号表示为符号表示为le个误差传感器4分别生成le个误差信号e(n),这些误差信号可以用向量符号表示为ly个声源3分别由ly个控制信号y(n)驱动,这些控制信号可以用向量符号表示为
[0113]
自适应子带滤波算法8用于通过使用自适应滤波器w(n)对参考信号x(n)进行滤波来生成控制信号y(n),使得声源3可以生成用于抵消初级噪声9的次级噪声。声源3和误差传感器4设置在声传播域12中。声传播域12可以是开放的或关闭的。
[0114]
初级噪声9可以是道路噪声,由例如车辆与道路通过车轮的相互作用生成。初级噪声9还可以是任何其他类型的噪声,比如风噪声或引擎噪声,前提是该噪声可以通过物理上可测量的参考信号表征。
[0115]
自适应滤波器w(n)可以根据比如lms算法等任何已知的方法来更新,以减少误差传感器4处的初级噪声9和次级噪声的叠加,即减少误差信号e(n),或误差传感器4处的平方压力。自适应滤波器w(n)可以被连续更新。图3中的自适应子带滤波算法8可以是无延迟子带fxlms算法。术语无延迟是指控制信号是针对每个样本使用全频带自适应滤波器w(n)在时域中从参考信号生成的事实,这意味着与全频带fxlms算法相比,控制信号的生成中没有附加延迟。
[0116]
参考信号可以首先由次级路径模型进行滤波,该次级路径模型表示从多个声源(也被称为次级声源)中的每一个声源到多个误差传感器中的每一个误差传感器的多个声传输路径。因此,次级路径的数量可以是声源的数量乘以误差传感器的数量,即在该示例中为ly*le。
[0117]
经滤波参考信号x'(n)可以用向量符号表示为经滤波参考信号x'(n)可以用向量符号表示为经滤波参考信号x'(n)可以由滤波器组10进行滤波。因此,可以从经滤波参考信号中的每一个生成k个子带信号。滤波器组10可以包括因数d的抽取步骤,其中,这可能导致每个子带l
x
个子带参考信号x'
(k)
。进一步地,由于参考信号x(n)由包括ly*le个次级路径的次级路径模型滤波,因此每个子带参考信号x'
(k)
包含ly*le个信号。这可能导致每个子带总计l
x
*ly*le个子带参考信号x'
(k)
。
[0118]
子带参考矩阵r
(k)
可以是矩阵,其中,每个系数由经子带滤波参考信号构成。针对
子带k的子带参考矩阵r
(k)
可以表达为
[0119][0120]
其中,
[0121][0122]
isaf可以表示子带k的子带自适应滤波器的长度。n可以指时间步n。例如,当n指当前时间步时,n-1指前一个时间步并且n+1指下一个时间步。
[0123]
误差信号e(n)也由滤波器组10抽取,作为参考信号x(n)。这可能导致每个子带le个子带误差信号e
(k)
。
[0124]
优选地,在由滤波器组10创建的k个子带中,仅使用前个子带。其他子带可以仅包含冗余信息。
[0125]
对于前个子带中的每个子带k,子带自适应滤波器w
(k)
由比如图3中示出的lms算法等基于子带参考信号、子带误差信号的自适应算法来更新。使用全频带自适应滤波器从全频带参考信号x(n)生成控制信号y(n)。
[0126]
当每个子带k、优选地前个子带中的每个子带的(多个)子带自适应滤波器w
(k)
被更新时,可以基于更新的子带自适应滤波器通过熟知的方案7(例如,权重或频率堆叠方案)来重构全频带自适应滤波器。
[0127]
滤波器组10可以是分析滤波器组,比如均匀离散傅立叶变换调制(udftm)滤波器组。权重堆叠方案可以是[2]中描述的提出的快速傅立叶变换权重堆叠方案。
[0128]
结合图4,详细讨论了根据本发明的噪声控制系统。
[0129]
在图4中,对于每个子带k,优选地前个子带,可以例如通过控制电路(未示出)的参考信号选择单元5来选择子带k的经滤波子带参考信号的真子集。对于每个子带k,可以例如通过控制电路的误差信号选择单元6来选择子带k的子带误差信号的真子集。
[0130]
对于每个子带k,每个子带自适应滤波器可以与用于生成次级噪声的次级声源相对应。对于每个子带k,可以例如通过控制电路(未示出)的自适应滤波器选择函数来选择子带自适应滤波器的真子集。
[0131]
参考信号选择单元5、误差信号选择单元6和自适应滤波器选择函数可以组合为一个或两个选择单元,或者设置为三个独立的选择单元。例如,可以将参考信号选择单元5和自适应滤波器选择函数设置为一个选择单元5。
[0132]
对于每个子带k,仅子带参考信号的所选子集和/或子带误差信号的所选子集用于更新子带自适应滤波器w
(k)
的所选子集,其中,这三个所选子集中的至少一个是真子集,上标
(k)
可以表示与子带k相关的量。
[0133]
参考信号选择单元5可以包括用于为子带k选择l
x
个参考传感器1的子集、优选地真子集的函数χ
(k)
。函数χ
(k)
可以是定义要为子带k选择和/或激活l
x
个参考传感器中的哪些
参考传感器的函数。函数χ
(k)
可以预先确定。对于子带k,仅使用从由所选参考传感器生成的参考信号中分解出的子带参考信号。
[0134]
可以是为子带k选择的参考传感器的数量。可以小于l
x
。也就是说,
[0135]
参考信号选择单元5和/或误差信号选择单元6可以包括用于为子带k选择误差传感器4的子集、优选地真子集的函数∈
(k)
。函数∈
(k)
可以是定义要为子带k选择和/或激活le个误差传感器中的哪些误差传感器的函数。函数∈
(k)
可以预先确定。对于子带,仅使用从由所选误差传感器生成的误差信号中分解出的子带误差信号。
[0136]
可以是为子带k选择的误差传感器的数量。可以小于le。也就是说,
[0137]
自适应滤波器选择函数可以是用于为子带k选择声源3的子集、优选地真子集的函数ψ
(k)
。函数ψ
(k)
可以是定义要为子带k选择和/或激活ly个声源3中的哪些声源的函数。函数ψ
(k)
可以预先确定。对于子带,可以仅更新与这些所选声源相对应的子带自适应滤波器。
[0138]
可以是为子带k选择的声源的数量。可以小于ly。也就是说,。也就是说,
[0139]
可以基于每个子带的物理性质(例如,不同的频率范围)来选择用于更新子带自适应滤波器的例如分别由函数∈
(k)
、ψ
(k)
和χ
(k)
定义的所选子集的子带参考信号的所选子集和子带误差信号的所选子集。例如,对于与低频范围相对应的子带,可以不选择从由用于检测高频率噪声的参考传感器生成的参考信号中分解出的子带参考信号来更新该子带的子带自适应滤波器。除了潜在的性能增益外,这还允许减少计算成本。
[0140]
这些函数可以用于参考信号选择单元5和/或误差信号选择单元6中以选择子带参考信号和误差信号的子集。例如,参考信号选择单元5可以使用所有三个函数并且选择子带参考信号的子集。在图4的示例中,因为每一对声源与误差传感器都有一个次级路径模型,经子带滤波参考信号可以由[参考传感器,声源,误差传感器]来索引,因此可以使用所有三个函数来选择这些索引之一,以确定要选择子带参考信号中的哪些子带参考信号。
[0141]
当参考信号被分解为子带参考信号,并且在子带次级路径滤波之前选择了子带参考信号时,如图5的示例,参考信号选择单元5可以仅使用用于选择子带参考信号的函数。误差信号选择单元6可以仅使用用于选择子带误差信号的函数。
[0142]
针对子带k的子带误差信号e
(k)
的所选子集可以表达为
[0143][0144]
针对子带k的子带参考矩阵r
(k)
可以表达为
[0145]
[0146]
其中,
[0147][0148]
isaf可以表示子带k的子带自适应滤波器的长度。
[0149]
每个x'可以表示所选经子带滤波参考信号,其与所选参考传感器χ
(k)
(l
x
)、所选误差传感器∈
(k)
(le)和所选声源ψ
(k)
(ly)相对应。
[0150][0151][0152]
其中,j是用于次级路径模型的滤波器的长度。
[0153]
次级路径模型是声源(即次级声源)与误差传感器之间的有限脉冲响应,在数学上由j系数表示。
[0154]
对于每个子带k,子带自适应滤波器w
(k)
可以表达为
[0155][0156]
子带自适应滤波器w
(k)
中的每个子带自适应滤波器可以表达为
[0157]
根据下式,可以使用已知方法,比如图4中示出的lms算法来更新时间步n+1处的子带自适应滤波器w
(k)
[0158]w(k)
(n+1)=w
(k)
(n)-μ
(k)r(k)h
(n)e
(k)
(n),
[0159]
其中,μ
(k)
是步长,也被称为收敛增益或学习率。
[0160]
当子带参考信号的真子集被选择并且用于更新子带的子带自适应滤波器时,如在图4中,与图3的示例相比,子带参考矩阵r
(k)
可以具有减小的大小。
[0161]
替代性地或组合地,当子带误差信号的真子集被选择并且用于更新子带的子带自适应滤波器时,如在图4中,与图3的示例相比,子带参考矩阵r
(k)
可以具有减小的大小。
[0162]
替代性地或组合地,当子带自适应滤波器的真子集在子带上更新时,与图3的示例相比,子带参考矩阵r
(k)
可以具有减小的大小。
[0163]
因此,上文与子带参考矩阵r
(k)
相关的公式也不同于图3的示例的公式。
[0164]
进一步地,根据图4的示例,可以为子带仅更新子带自适应滤波器的所选子集。
[0165]
一旦更新所选子带自适应滤波器w
(k)
,全频带自适应滤波器w就可以通过已知的权重或频率堆叠方案7来重构,如图4中示出的。由于可以在至少一个子带上仅更新一些子带自适应滤波器,因此通过仅使用更新的子带自适应滤波器来执行重构方案7。不需要使用未
更新的子带自适应滤波器来重构全频带自适应滤波器,因为其系数是无用的,例如为零。
[0166]
图5是噪声控制系统的另一个示例。
[0167]
图5的示例与图3至图4的示例的不同之处在于,图5中的参考信号x(n)在由滤波器组10滤波之前没有由次级路径模型滤波。相反,图5中的参考信号x(n)首先由滤波器组10滤波和抽取。这导致每个子带k l
x
个子带参考信号x
(k)
。
[0168]
对于每个子带k,可以例如通过控制电路(未示出)的参考信号选择单元5来选择子带参考信号的子集。对于每个子带k,在更新子带自适应滤波器w
(k)
之前,子带参考信号的所选子集可以由子带次级路径模型滤波。
[0169]
也就是说,在图3至图4的示例中,所有参考信号x(n)都由次级路径模型滤波。然而,在图5的示例中,对于每个子带k,仅所选子带参考信号由子带次级路径模型滤波。子带次级路径模型是图4的次级路径模型的子带等效物。例如,子带次级路径模型可以通过由滤波器组10对图4的次级路径模型进行滤波来获得。
[0170]
这可能是有利的,因为通过仅对子带参考信号的所选子集进行滤波,可以进一步减少计算成本。
[0171]
每个子带次级路径模型可以用j
saf
系数建模。由于在由滤波器组10进行的子带滤波期间应用的抽取因数,j
saf
可以小于j。例如,j
saf
可以视作与j和k相关的值,比如j
saf
=4j/k。
[0172]
进一步地,与图3至图4中用于存储次级路径模型的存储器相比,具有更小大小的存储器可以用于存储子带次级路径模型
[0173]
结合图6a、图6b和图7,详细描述了用于确定子带参考信号的子集以及因此对应的(全频带)参考信号的子集以及用于生成参考信号的对应参考传感器的子集的方法的程序。
[0174]
miso系统可以用作描述包括多个输入和单个输出的系统的简化模型。
[0175]
miso系统可以由下式表示
[0176][0177]
其中,xi,i=1,2,...,i,...,l
x
,表示多个输入,并且y表示单个输出。并且h
iy
是用于表示每个输入xi与输出y之间的线性关系的传递函数。n表示与理想模型的所有可能的偏差。也就是说,n表示没有由输入进行测量和计算的一切。
[0178]
图6a是miso系统的示例。使用传递函数h
iy
,可以计算每个输入xi对输出y的贡献yi,i=1,2,...,i,...,l
x
。输出y是每个贡献yi与n的总和。
[0179]
为了更好地表征miso系统,已经完成了许多研究来标识传递函数h
iy
。
[0180]
图6a的miso系统可以等效地由一组有序的经调节的输入来表示,其中,每个输入都由先前的输入进行调节,如图6b中示出的。
[0181]
在图6b中,x
i.(i-1)!
意指经调节的输入xi。也就是说,对于每个经调节的输入xi,x1到x
i-1
的线性影响已经例如通过最佳线性最小二乘预测技术被去除。经调节的输入x
i.(i-1)!
彼此不相关。图6b的传递函数l
iy
通常不同于图6a中的h
iy
。
[0182]
图6b中的等效miso系统可以由下式表示
[0183][0184]
因此,可以通过以下关系来确定h
iy
和l
iy
[0185][0186]
其中,s
ij
是信号i与信号j之间的互谱(cross-spectral)密度,并且s
ii
是信号i的自成谱(autospectrum)。
[0187][0188]
因此,可以将miso系统分解为各自包括单个输入的不相关子系统,并且特别地允许计算量化多个输入xi中的每一个输入与输出y之间的线性度的多重相干性γ2。因此,可以确定多个输入xi中的哪一个或哪些输入对输出贡献最大,即多个输入xi中的哪一个或哪些输入是最重要的(多个)输入。
[0189]
在anc和/或arnc系统中,确定多重相干性γ2可能是有用的。例如,anc和/或arnc系统使用l
x
参考信号可以实现的声音降低可能受到多重相干性γ2的限制,该多重相干性量化了每个参考信号与在某个位置测得的声音之间的线性度。声音降低δdb
limit
与多重相干性γ2之间的关系可以表达为
[0190]
δdb
limit
=101og(1-γ2)。
[0191]
涉及所有输入的多重相干性γ2与多个输入xi的顺序无关。然而,每个输入与输出之间的部分相干性取决于多个输入xi的顺序。
[0192]
相干性水平或部分相干性水平是表示多个信号或数据集之间关系的数学方式。例如,相干性水平或部分相干性水平可以用于估计线性系统的输入与输出之间的功率传输。相干性水平或部分相干性水平可以用于估计miso系统中输入对输出的贡献。
[0193]
因此,通过选择在每个(经调节的)输入与单个输出之间具有最大相干值或最大部分相干值的输入,可以选择输入并且任选地按照对输出的减少贡献对输入进行排序。对输出贡献最大的输入是要在多个输入之中选择的第一个输入。并且对输出贡献最少的输入是要在多个输入之中选择的最后一个输入。因此,也可以根据多个输入对输出的单独贡献来对该多个输入按顺序进行排序。也就是说,可以确定对特定频率范围内的声音贡献最大的子带参考信号的子集、以及因此对应参考信号的子集、以及用于生成参考信号的对应参考传感器的子集。
[0194]
这可能是有利的,因为其可以促进基于经排序的多个输入的进一步处理。例如,为了节省计算能力,可以仅处理相干值大于阈值的输入。
[0195]
结合图7,详细讨论了选择子带参考信号的子集(即参考信号的子集或参考传感器的子集)的步骤。
[0196]
图7的miso系统具有五个输入x1到x5以及一个单个输出(未示出)。然而,输入的数量可以是任何正整数。这五个输入可以是由五个不同的参考传感器生成的五个不同的全频带参考信号。单个输出可以是在例如声学空腔内的某个位置,比如靠近汽车内驾驶员的耳朵和/或头部位置的位置处测得的声学信号。应该在其中最大化多重相干性的频率范围可
以是与图3至图5的示例的子带相对应的频率范围。
[0197]
在图7中,输入x1到x5根据基于这些输入在与子带相对应的频率范围内各自与输出的相干性,即这些输入各自对的输出的贡献来对输入进行排序的最终顺序进行编号。也就是说,在图7中,输入x1与输出的相干性最大,并且输入x5与输出的相干性最小。这仅是为了简化说明。然而,可以按任何顺序对输入进行布置。
[0198]
步骤1:输入x1到x5可以按任意顺序布置。在图7中,输入按此顺序布置:x5,x4,x1,x2,x3。
[0199]
步骤2:计算输入x1到x5中的每一个与输出之间的相干值。选择在与子带相对应的频率范围内具有最大相干值的输入作为第一输入。在此,x1是第一输入,其具有最大相干值。输入的剩余组由输入x1到x5组成。
[0200]
步骤3:执行miso系统标识的第一阶段,该第一阶段基本上包含通过在当前步骤3的前一个步骤中选择的输入,即在步骤2中选择的x1来调节输入的剩余组。调节步骤可以分别移除输入x5、x4、x2和x3对输出的线性贡献l
15
、l
14
、l
12
、l
13
,已经针对所选输入x1考虑了该移除。
[0201]
该示例中的经调节的输入l
15
、l
14
、l
12
、l
13
可以被计算为:
[0202]
x
j.1
=x
j-l
1j
x1,j=2,3,4,5
[0203]
步骤4:计算每个经调节的输入与输出之间的部分相干性选择与在与子带相对应的频率范围内具有最大部分相干值的经调节的输入相对应的输入作为第二输入。在此,x2是第二输入,其在输入x2到x5之中具有最大部分相干值。现在输入的剩余组由输入x3到x5组成。
[0204]
步骤5:执行miso系统标识的第二阶段,该第二阶段基本上包含通过在当前步骤5的前一个步骤中选择的输入,即在步骤4中选择的x2来调节输入的剩余组。调节步骤可以分别移除输入x5、x4和x3对输出的线性贡献l
25
、l
24
、l
23
,已经针对所选输入x2考虑了该移除。
[0205]
该示例中经调节的输入x
5.2!
、x
4.2!
、x
3.2!
可以被计算为:
[0206]
x
j.2!
=x
j.1-l
2j
x
2.1
,j=3,4,5
[0207]
从步骤5开始并且包括该步骤,可以进行步骤3至步骤4的迭代,例如,步骤5至步骤6和步骤7至步骤8是步骤3至步骤4的迭代。通过迭代,输入的剩余组通过先前所选输入进行调节,然后计算输入的剩余组中的每一个与输出之间的部分相干性,并且选择输入的剩余组中在与子带相对应的频率范围内具有最大部分相干值的一个输入。迭代可以继续,直到输入的剩余组由最后一个输入x5组成。
[0208]
然而,如在图7中,在选择所有输入之前不需要执行该方法。例如,如果仅标识对输出贡献最大的所有(多个)输入的子集,则执行该方法直到选择足够数量的输入就足够了。也就是说,迭代可以继续直到已经选择了预定数量的输入。例如,仅选择具有最大相干性的前三个输入。
[0209]
替代性地,可以确定表示最小部分相干值的阈值。可以执行该方法直到输入的剩余组的最大部分相干值低于阈值。
[0210]
步骤9:执行miso系统标识的最后阶段,该最后阶段基本上包含通过在当前步骤9的前一个步骤中选择的输入,即在步骤8中选择的x4来调节最后一个输入x5。调节步骤可以移除最后一个输入x5对输出的线性贡献l
45
,已经针对所选输入x4考虑了该移除。
[0211]
该示例中经调节的输入x
5.4!
可以被计算为:
[0212]
x
5.4!
=x
5.3!-l
45
x
4.3!
[0213]
步骤10:最后一个输入x5被选择作为最后输入,即图7中的第五个输入。可以基于选择多个输入中的每个输入的顺序来对该多个输入进行排序。进一步地,该多个输入已经通过先前所选输入进行调节。第一个所选输入,在此为x1,没有被调节,因为先前没有选择任何输入。
[0214]
该方法可以用任意数量的输入来执行。输入可以具有任意初始顺序。一旦执行该方法直到选择了所有输入,如图7中示出的,则所有输入都可以按与输出的降低的相干性,即对输出的减少的贡献进行排序。由于除第一个所选输入之外的所有输入都通过先前所选输入进行调节,因此可以减少输入之间的信息冗余。也就是说,在步骤2、4、6和8处在系统中选择的每个输入对输出的关于添加(非冗余)信息的贡献最大。
[0215]
因此,在输入的剩余组用于下一次迭代之前,该方法可以例如,在图7的步骤2、4、6、8和10中选择输入并且任选地对输入进行排序。
[0216]
用于从miso系统的多个输入中选择至少一个输入的方法可以在许多现有miso系统或包括miso子系统的系统、比如图1至图5的anc或arnc系统中实施。
[0217]
因此,可以根据图7的程序选择参考传感器中与所选输入相对应的子集。
[0218]
在与子带相对应的频率范围内的降噪方面,参考传感器的所选子集可能比其他未选择的参考传感器更重要。
[0219]
进一步地,通过系统分解,可以仅基于参考传感器的所选子集来直接估计anc系统在与一个子带相对应的频率范围内可以实现的最大性能。
[0220]
根据图4至图5的噪声控制系统,anc系统具有l
x
个参考传感器。对于与特定频率范围相对应的子带k,可以通过图7的方法来选择所选数量个参考传感器,其中,等于或小于l
x
。也就是说,
[0221]
参考传感器的子集可以由函数χ
(k)
定义。函数χ
(k)
可以通过执行图7的方法来定义,其中,与参考传感器k相对应的参考信号可以被视为图7的miso系统的多个输入。应该在其中最大化相干性的频率范围可以与图3至图5的示例的感兴趣子带的频率范围相对应。
[0222]
然后可以将函数χ
(k)
定义为将映射到前个顺序输入索引的函数。例如,在执行图7的方法之后,输入(即参考信号)被排序为x2、x3、x5、x1、x4。如果期望选择贡献最大的前三个输入(l
x
=3),则函数χk将被定义为χk(1)=2,χk(2)=3,χk(3)=5,与顺序输入相对应。
[0223]
可以直接评估anc系统可以针对子带k实现的性能。为简单起见,选择以下索引作为所有输入排序后的最终顺序,如图7中的示例。为简单起见,认为在图5的示例中,每个子带有l
x
个子带参考信号。
[0224]
子带参考信号、或参考信号或参考传感器可以被视为图7中的示例的输入。
[0225]
输出可以是在例如声学空腔内的一个位置处测得的声学信号。应该在其中最大化多重相干性的频率范围可以是与感兴趣子带相对应的频率范围。
[0226]
可以选择经排序的输入的前个子带参考信号,根据下式,这些子带参考信号
可以对输出自成谱s
yy
的以下部分做出贡献
[0227][0228]
部分相干性可以根据下式基于经调节的频谱来确定
[0229][0230]
可以根据下式基于部分相干性来确定从个所选(子带)参考信号到输出的多重相干性
[0231][0232]
因此,可以根据下式确定通过使用子带k的所选个(子带)参考信号可以实现的最大声音降低
[0233][0234]
可以被确定为实现子带的特定降噪水平所需的(子带)参考信号的数量。
[0235]
可以为每个子带执行(子带)参考信号的选择,以便为每个子带确定子带参考信号的子集。优选地,可以仅对所有子带中的前个子带执行选择。
[0236]
进一步地,基于子带参考信号的所确定子集,可以基于参考传感器与每个子带的(子带)参考信号之间的一对一关系来确定与子带参考信号的所确定子集相对应的参考传感器子集。
[0237]
然后可以定义函数在此,在k个子带中,仅使用前k/2+1个子带。
[0238]
图8至图9分别展示了通过选择anc系统中的参考传感器子集来降低汽车驾驶舱内的噪声的降噪测量结果的四个图。anc系统中使用了18个参考传感器。也就是说,有18个全频带参考信号,分别由18个参考传感器生成。因此,以图5的系统为例,对于与特定频率范围相对应的每个子带,有18个子带参考信号,每个子带参考信号与18个全频带参考信号和/或18个参考传感器之一相对应。
[0239]
当执行测量时,该汽车以40km/h的速度移动。在靠近驾驶员左耳的监测器麦克风4处检测到声音。
[0240]
在图8至图9的图中,子带参考信号按对在监测器4处检测到的声音的减少的贡献而列出。也就是说,图8中的第一参考信号“50:右前轮_车身_x:+x”和图9中的第一参考信号“34:右后轮_叉骨_z:+z”分别对检测到的声音贡献最大。参考信号以生成参考信号的对应参考传感器的位置和方向来命名。参考传感器是围绕汽车车身的不同车轮、叉骨或减震器在向前(+x)、横向(+y)或向上(+z)方向上放置的加速度计。在此,向前方向是汽车向前移动的方向。
[0241]
在图8中,对与160hz-174hz频率范围相对应的第一子带执行分析。在图9中,对与
220hz-234hz频率范围相对应的第二子带执行分析。
[0242]
图8至图9的声学频谱是通过为监测器4处检测到的声音选择不同数量的子带参考信号来重构的,这些子带参考信号在相应频率范围内进行了优化。
[0243]
从图8至图9来看,清楚的是,在第一子带(即160hz-174hz)中对在监测器位置4处检测到的声音贡献最大的前四个子带参考信号与在第二子带(即220hz-234hz)中的不同。在第一子带中,四个最重要的子带参考信号由朝向向前(+x)和横向(+y)方向的参考传感器生成的参考信号组成。而在第二子带中,四个最重要的子带参考信号由朝向向上(+z)方向的参考传感器生成的参考信号组成。
[0244]
该差异确实反映了不同主导模式的激励。例如,160hz-174hz频率范围中的主导模式为前-后和横向模式,并且220hz-234hz频率范围中的主导模式为竖直模式。
[0245]
因此,对于与这两个频率范围相对应的第一子带和第二子带,为了优化系统以降低监测器4处的噪声,可以使用图8至图9中指示的总共18个子带参考信号的子集,例如,前四个或前八个子带参考信号。
[0246]
声学空腔(例如汽车驾驶舱)内通常有超过一个监测器。可以对设置在不同位置处的不同监测器执行该方法。
[0247]
可以执行该方法以跨越更大的频率范围,即针对多个感兴趣子带,为这些子带中的每个子带选择参考信号的子集。
[0248]
参考信号和/或子带参考信号可以根据某个值、例如表示在超过一个监测器位置处检测到的声音的平均声级来排序。
[0249]
图10至图11展示了测得的spl值的图。
[0250]
声压(sound pressure)或声压(acoustic pressure)是由声波引起的与环境、平均或平衡大气压力的局部压力偏差。在空气中,可以使用例如麦克风来测量声压。声压级(sound pressure level,spl)或声压级(acoustic pressure level)是声音的有效压力相对于参考值的对数度量。
[0251]
图10至图11展示了对汽车内的道路噪声不进行主动噪声控制和使用fxlms算法进行主动噪声控制的情况下的不同spl值。该算法被配置为仅控制分别在160hz谐振频率和230hz谐振频率附近的子带的噪声。
[0252]
汽车设置有围绕汽车车身上的不同车轮、叉骨或减震器放置的8个参考传感器,其中,4个在向前(x)和横向(y)方向,并且4个在向上(z)方向。在此,向前方向是汽车向前移动的方向。
[0253]
在向前(x)和横向(y)方向的4个参考传感器中,2个参考传感器在向前(x)方向,并且2个参考传感器在横向(y)方向。
[0254]
该车还设置有用于生成次级噪声的4个声源,例如,扬声器,以及6个误差传感器,例如,控制麦克风。
[0255]
图10至图11中示出的结果是针对放置在驾驶员头部上方的车顶上的3号误差传感器。
[0256]
图10a至图10c的图展示了不进行主动噪声控制以及分别通过使用所有8个参考传感器、通过仅使用在向前和横向方向的4个参考传感器和通过仅使用在向上方向的4个参考传感器进行主动噪声控制的情况下的spl值。
[0257]
图11a至图11c的图展示了不进行主动噪声控制以及分别通过使用所有8个参考传感器、通过仅使用在向前和横向方向的4个参考传感器和通过仅使用在向上方向的4个参考传感器进行主动噪声控制的情况下的spl值。
[0258]
在图10a至图10c中,该算法被配置为仅控制与160hz谐振附近的频率相对应的子带,而在图11a至图11c中,该算法被配置为仅控制与230hz谐振附近的频率相对应的子带。
[0259]
从图8来看,已知在160hz左右,谐振可以由前向和横向方向的参考信号最好地表示。结合图10a和图10b中测得的spl值,清楚的是,仅使用前向和横向方向的这4个参考传感器,噪声消除效果几乎与使用所有8个参考传感器一样好。
[0260]
类似地,从图9来看,已知在230hz左右,谐振可以由向上方向的参考信号最好地表示。结合图11a和图11c中测得的spl值,清楚的是,仅使用向上方向的这4个参考传感器,所产生的噪声消除几乎等同于使用所有8个参考传感器得到的最大降噪。
[0261]
因此,至少对于这些子带,不需要涉及所有子带参考信号来实现良好的降噪。相反,通过选择子带参考信号的子集,可以实现良好的降噪。同时,可以降低所涉及的计算成本,并且可以提高收敛速度。
[0262]
用于针对子带k分别选择误差传感器的子集、优选地真子集以及声源的子集、优选地真子集的函数∈
(k)
和/或ψ
(k)
可以通过不同方法来确定。
[0263]
例如,针对子带k的函数∈
(k)
和/或ψ
(k)
可以通过针对子带k的特定频率范围对初级声场与次级声场进行最佳空间匹配来确定。
[0264]
声学空腔(例如,汽车驾驶舱)内的声场可能主要由谐振声学模式管控,这些谐振声学模式取决于声波的频率。因此,对于与不同频率范围相对应的不同子带,声场可以由不同的声学模式管控。
[0265]
可以选择误差传感器和/或声源的位置,以在要消除噪声的整个频率范围内和比如汽车的移动速度等不同操作条件下匹配声学模式。
[0266]
匹配声学模式可以包括将误差传感器和/或声源放置在模态节点之外的某处。
[0267]
模态节点或模态线包括空间中由驻波引起的声学模式具有零振幅的点。也就是说,在模态节点或模态线处根本没有信号。因此,为了消除初级声音,应优选地将误差传感器和/或声源放置在空间中的这些区域之外。
[0268]
可以选择至少一个误差传感器和/或至少一个声源的位置以针对与至少一个子带k相对应的特定频率范围匹配声学模式。
[0269]
然而,对于子带k,通常可能并非所有提供的误差传感器和/或声源都需要,因为子带k的频率范围的声学模式可能与要消除的噪声的整个频率范围的声学模式不同,特别是在较低频率下,其中,声学模式不太复杂,例如,20hz到100hz。
[0270]
因此,对于子带k,可以仅使用从由子带k所需的那些参考传感器生成的参考信号中分解出的子带参考信号。也就是说,当处理子带参考信号时,例如当更新子带自适应滤波器时,可以丢弃从由不需要的那些参考传感器生成的参考信号中分解出的子带参考信号。
[0271]
当不需要时丢弃那些子带参考信号以进一步减小针对每个子带的系统的大小可能是有利的。类似地,对于子带k,可以丢弃一些子带误差信号。类似地,也可以不更新与不需要的声源相对应的子带自适应滤波器中的至少一些。
[0272]
随着子带信号数量的减少,可以减少计算操作的量,并且可以提高该方法的收敛
速度。
[0273]
图12中展示了针对子带k定义函数∈
(k)
和/或ψ
(k)
的程序。在该示例中,声学空腔是汽车驾驶舱。
[0274]
在步骤1中,执行对驾驶舱内的噪声的例如由道路-轮胎相互作用生成的初级声场、即要消除的干扰声场的操作测量。例如,可以在从例如0km/h到130km/h的加速期间执行这些操作测量。汽车设置有多个误差传感器,由图12中的黑色麦克风表示,以及多个监测器传感器,由图12中的彩色麦克风表示。监测器传感器可以设置在声级将被检测并且最终被降低的位置处,例如,靠近驾驶员和/或乘客的头部或耳朵的位置。基于这些操作测量,可以确定所有提供的传感器的自成谱和互谱。
[0275]
在步骤2中,次级声场、即由次级声源生成的声场可以通过测量从所有声源位置到所有传感器位置(包括误差传感器和监测器传感器)的响应函数来表征。
[0276]
在步骤3中,分析来自步骤1和步骤2的测得的数据,以针对每个子带k定义误差传感器和/或声源的一组最佳位置,从而在噪声的整个频率范围内在监测器传感器位置处提供足够的声音降低。
[0277]
对于每个子带k,可以在频域中执行步骤3的分析。误差传感器和/或声源的所定义的一组最佳位置可以用于定义(多个)函数∈
(k)
和/或ψ
(k)
,以确定在最佳位置处的误差传感器和/或声源是要用于每个子带k的误差传感器和/或声源。因此,可以选择与这些声源和/或误差传感器相对应的经子带滤波参考信号和/或子带误差信号来更新与所选声源相对应的子带自适应滤波器。与子带k的其他未选择的误差传感器和/或声源相对应的子带信号可以被丢弃。
[0278]
图13展示了当执行不同的anc方法或未执行anc方法时、即anc关闭时测得的spl值的图。
[0279]
图13中的spl值是在小型电动汽车内靠近前排乘客耳朵的位置处测得的,该汽车设置有靠近车轮放置的8个参考传感器、4个扬声器和6个麦克风。当执行测量时,该汽车以40km/h的速度向前移动。
[0280]
图13中呈现了在以下情况下的spl值:不进行任何主动噪声控制、进行使用全频带fxlms算法的主动噪声控制方法、进行其中使用了所有子带参考信号的使用子带fxlms算法的主动噪声控制方法、以及进行用针对所选子带的子带参考信号的所选子集的使用子带fxlms算法的主动噪声控制方法。在此,子带参考信号的所选子集是所选子带的所有子带参考信号的约一半。
[0281]
从图13来看,清楚的是,与其他两种主动噪声控制方法相比,使用所选子带的子带参考信号的所选子集的使用子带fxlms算法的主动噪声控制方法可以实现类似水平的降噪。然而,使用子带参考信号的较小且优化的子集可以导致低得多的计算成本。
[0282]
在该示例中,仅选择参考传感器的子集。也就是说,使用所有子带误差信号,并且针对所有声源更新所有子带自适应滤波器。然而,根据图12中描述的方法,可以选择针对子带k的误差传感器的子集和声源的子集以进一步减少计算成本。
[0283]
可以基于子带参考信号来调整每个单独子带的步长,以减少经滤波参考矩阵在每个子带中的频谱范围或特征值扩散,从而改善子带fxlms算法的收敛性。然而,在该示例中没有调整步长,解释了全频带fxlms与子带fxlms之间的类似性能。
[0284]
图14针对图13中示出的示例将用于选择参考传感器的在每个子带上活跃的子集的函数χ
(k)
的示例可视化。
[0285]
图14的y轴是参考传感器索引。也就是说,数字1到8中的每个数字指的是图13的八个参考传感器之一。图14的x轴是子带索引。在该示例中使用了使用128个子带的算法,其中,所有信息都可以被视为包含在前65个子带内。
[0286]
根据图13的用于选择参考传感器的子集的函数χ
(k)
如图14所定义。
[0287]
例如,在子带1中,选择源自参考传感器1、2、3、4、7和8的子带参考信号,而不选择源自参考传感器5和6的子带参考信号。
[0288]
例如,在子带20和21中,没有选择任何参考传感器。子带24到65也是如此。由于没有选择参考传感器而不具有子带参考信号的这些子带上的子带自适应滤波器可以不被更新。
[0289]
下表1中列出并且比较了不同anc方法的计算成本。
[0290]
所使用的示例anc系统具有m个声源、l
x
个参考传感器、le个误差传感器、k个子带、i个全频带自适应滤波器抽头和j个次级路径模型抽头。抽取率d取为k/4。子带自适应滤波器和次级路径模型的抽头数量分别取为isaf=4i/k和jsaf=4j/k。所提出的方法和其他已知anc方法的每个步骤中所需的每样本乘法数量列在表1中。
[0291]
假设在所提出的方法中,为每个子带选择了与约50%的参考传感器、误差传感器和声源相对应的信号,并且仅更新了所有子带的约50%。
[0292][0293]
表1:计算成本
[0294]
全频带次级路径建模意味着参考信号x(n)可以首先由次级路径模型进行滤波。经滤波参考信号x'(n)然后可以由k个子带组成的滤波器组10进行滤波。然后,对于每个子带k,可以选择子带k的子带参考信号的子集。
[0295]
子带次级路径建模意味着参考信号x(n)在由滤波器组10滤波之前没有由次级路径模型进行滤波。相反,参考信号x(n)首先由滤波器组10滤波和抽取。对于每个子带k,可以选择子带参考信号的子集。如在图5中,在更新子带自适应滤波器w
(k)
之前,子带参考信号的所选子集可以由子带次级路径模型进行滤波。
[0296]
图15是表1中的不同方法所需的每样本乘法数量的图,其中,m=4,l
x
=8,le=6,j=256并且i=256。
[0297]
虚线表示使用标准全频带fxlms的anc方法的每样本乘法数量。
[0298]
上实线表示使用全频带次级路径建模的使用子带fxlms的anc方法的每样本乘法数量。
[0299]
上虚线表示使用子带次级路径建模的使用子带fxlms的anc方法的每样本乘法数量。
[0300]
下实线表示使用全频带次级路径建模和子带信号选择的使用子带fxlms的所提出的anc方法的每样本乘法数量,如在图4中。
[0301]
下虚线表示使用子带次级路径建模和子带信号选择的使用子带fxlms的所提出的anc方法的每样本乘法数量,如在图5中。
[0302]
当有128个子带时,使用子带次级路径建模和子带信号选择的使用子带fxlms的所提出的anc方法表示与不使用子带信号选择的相同算法相比,计算成本降低了3.4倍,并且与使用标准全频带fxlms算法的anc方法相比,计算成本降低了9.5倍。
[0303]
对于图13中示出的示例,与使用全频带算法的anc方法相比,计算成本可以降低6倍,并且与使用标准子带算法的anc方法相比,计算成本可以降低2.5倍。
[0304]
如果分别选择在每个子带上活跃的误差传感器子集和/或声源子集来例如通过函数∈
(k)
和/或ψ
(k)
来更新子带自适应滤波器,则可以实现附加计算成本降低。
[0305]
已知全频带无延迟子带算法的收敛速度由更新算法在每个子带中的收敛速度确定。每个子带自适应滤波器的收敛速度由海赛矩阵(hessian matrix)管控,更准确地由其特征值扩散管控,该特征值扩散被定义为最大特征值与最小特征值的比率。
[0306]
因此,通过选择子带信号的子集,包括任何子带参考信号和子带误差信号,用于在每个子带k中构建r
(k)
,而不是使用所有可用的子带信号,海赛矩阵的大小可能会显著减少。
[0307]
因此,特征值扩散可以减少。通过确定每个子带的最佳步长可以实现更快的收敛速度。可以通过针对每个子带的参考传感器、声源和误差传感器的最佳数量和/或位置,以及函数χ
(k)
、∈
(k)
和/或ψ
(k)
的最佳定义来确保低收敛水平。