1.本实用新型涉及茯苓种植技术领域,具体涉及一种茯苓种植用树木切割装置。
背景技术:
2.茯苓属木腐真菌, 茯苓的形成是由茯苓菌丝体在适宜的条件下寄生于已死松木上,不断分解松木(蔸)纤维素、半纤维素中的营养,并将菌化后的多余物质积聚迅速膨大,形成的营养贮藏器官和休眠器官即为菌核,俗称松茯苓。由于茯苓菌丝体与松木中各元素亲和力特强,所以人工接种纯菌种菌丝传引快,三个月即可结苓,六个月可采挖取苓。在松树桩离地面一寸的地方,将周围的横根截去,然后将树皮剥开备用,削掉部分树皮,在削面上留一个5公分左右的不中断的树皮,作用在于传菌,然后将新鲜的茯苓捣成面状用纸包好,在接种的时加适量冷水搅拌成米汤状,将浆倒在事先准备好的树皮与木头裂缝间,最后将树皮捏合盖紧再进行覆土即可。因此,提供一种茯苓种植用树木切割装置。便于进行在松树桩进行种植茯苓。
技术实现要素:
3.本实用新型的目的在于提供一种茯苓种植用树木切割装置,解决树木不易进行切割的问题。
4.为解决上述的技术问题,本实用新型采用以下技术方案:
5.一种茯苓种植用树木切割装置,包括:固定架、操作平台、固定框、滑轨、带动轴、第一电机、带动板、切割机、第二电机、转动连接件、挡板、第一液压杆、第一液压泵、固定板;
6.所述固定架上设置有操作平台,操作平台上开有中间孔,中间孔一端处的操作平台上设置有固定框,固定框顶部设置有滑轨,滑轨内设置有带动轴,带动轴与第一电机连接,带动轴连接带动板,带动板上设置有切割机,切割机与第二电机连接;
7.中间孔处的操作平台上设置有转动连接件,转动连接件连接挡板,挡板连接有第一液压杆,第一液压杆与第一液压泵连接;
8.操作平台上设置有固定板。
9.进一步的;所述中间孔处的操作平台下部设置有输出通道。
10.进一步的;所述操作平台、带动板上均设置有第二液压杆,第二液压杆与第二液压泵连接,第二液压杆连接卡板。
11.进一步的;所述固定板侧壁上设置第一接触型传感器,挡板下侧壁上设置第二接触型传感器,卡板侧壁上设置第三接触型传感器。
12.进一步的;所述第一接触型传感器、第二接触型传感器、第三接触型传感器、第一电机、第二电机、第一液压泵、第二液压泵均与控制器连接。
13.进一步的;所述操作平台、固定板、输出通道、卡板壁均光滑设置。
14.与现有技术相比,本实用新型的至少具有以下有益效果之一:
15.1、树木放置在操作平台上的固定板处,第一电机连接的带动轴运动,带动轴连接
的带动板运动,且带动板处设置的切割机运动,便于进行切割,转动连接件处的挡板与中间孔一端处操作平台间为一个通道,便于切割机的刀片进行切割,切割后第一液压泵连接的第一液压杆运动,第一液压杆连接的挡板运动,便于切割后的树木进行输出。
16.2、第一液压杆连接的挡板向下运动,挡板贴在输出通道内壁上,便于切割后的树木进行输出。
附图说明
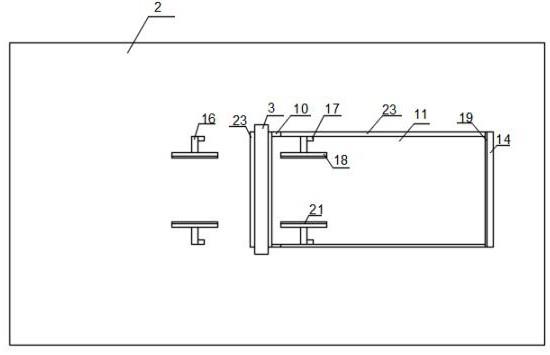
17.图1为本实用新型结构俯视图。
18.图2为本实用新型中操作平台的第一侧视图。
19.图3为本实用新型中操作平台的第二侧视图。
20.图中:固定架1、操作平台2、固定框3、滑轨4、带动轴5、第一电机6、带动板7、切割机8、第二电机9、转动连接件10、挡板11、第一液压杆12、第一液压泵13、固定板14、输出通道15、第二液压杆16、第二液压泵17、卡板18、第一接触型传感器19、第二接触型传感器20、第三接触型传感器21、控制器22、中间孔23。
具体实施方式
21.图1-3所示,为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
22.实施例1:
23.一种茯苓种植用树木切割装置,包括:固定架1、操作平台2、固定框3、滑轨4、带动轴5、第一电机6、带动板7、切割机8、第二电机9、转动连接件10、挡板11、第一液压杆12、第一液压泵13、固定板14;
24.固定架1上设置有操作平台2,操作平台2上开有中间孔23,中间孔23一端处的操作平台2上设置有固定框3,固定框3顶部设置有滑轨4,滑轨4内设置有带动轴5,带动轴5与第一电机6连接,带动轴5连接带动板7,带动板7上设置有切割机8,切割机8与第二电机9连接;
25.中间孔23处的操作平台2上设置有转动连接件10,转动连接件10连接挡板11,挡板11连接有第一液压杆12,第一液压杆12与第一液压泵13连接;
26.操作平台2上设置有固定板14;树木放置在操作平台2上的固定板14处,第一电机连接的带动轴5运动,带动轴5连接的带动板7运动,且带动板7处设置的切割机8运动,便于进行切割,转动连接件10处的挡板11与中间孔23一端处操作平台2间为一个通道,便于切割机8的刀片进行切割,切割后第一液压泵13连接的第一液压杆12运动,第一液压杆12连接的挡板11运动,便于切割后的树木进行输出。
27.实施例2:
28.在实施例1的基础上,中间孔23处的操作平台2下部设置有输出通道15;第一液压杆12连接的挡板11向下运动,挡板11贴在输出通道15内壁上,便于切割后的树木进行输出。
29.实施例3:
30.在实施例1-2的基础上,操作平台2、带动板7上均设置有第二液压杆16,第二液压杆16与第二液压泵17连接,第二液压杆16连接卡板18;操作平台2、带动板7处的第二液压杆
16运动,第二液压杆16连接的卡板18运动,便于将树木进行固定,便于进行切割。
31.实施例4:
32.在实施例1-3的基础上,固定板14侧壁上设置第一接触型传感器19,挡板11下侧壁上设置第二接触型传感器20,卡板18侧壁上设置第三接触型传感器21;便于进行切割。
33.实施例5:
34.在实施例1-4的基础上,第一接触型传感器19、第二接触型传感器20、第三接触型传感器21、第一电机6、第二电机9、第一液压泵13、第二液压泵17均与控制器22连接;当树木接触到固定板14的第一接触型传感器19时,作平台2、带动板7处的第二液压杆16运动,第二液压杆16连接的卡板18运动,便于将树木进行固定,再第一电机连接的带动轴5运动,带动轴5连接的带动板7运动,且带动板7处设置的切割机8运动,便于进行切割,切割后第一液压杆12连接的挡板11向下运动,挡板11下侧壁上设置第二接触型传感器20,挡板11贴在输出通道15内壁上,第一液压杆12停止运动,实现了切割输出。然后第一液压杆12向上运动,又开始进行切割。
35.实施例6:
36.在实施例1-5的基础上,操作平台2、固定板14、输出通道15、卡板18壁均光滑设置;满足需要。
37.尽管这里参照本实用新型的多个解释性实施例对本实用新型进行了描述,但是,应该理解,本领域技术人员可以设计出很多其他的修改和实施方式,这些修改和实施方式将落在本技术公开的原则范围和精神之内。更具体地说,在本技术公开、附图和权利要求的范围内,可以对主题组合布局的组成部件和/或布局进行多种变型和改进。除了对组成部件和/或布局进行的变形和改进外,对于本领域技术人员来说,其他的用途也将是明显的。