1.本实用新型涉及一种凸轮驱动缝纫机抬压脚、剪线、松线三合一机构及缝纫机。
背景技术:
2.现有缝纫机的抬压脚、剪线、松线装置一般由多个动力源驱动,如分别单独用电磁铁或气缸驱动,输入信号多,控制难度大,结构复杂,不利于安装和使用,成本高。
技术实现要素:
3.本实用新型的目的是解决上述背景技术中提及的缺陷。
4.为实现上述目的,第一方面,本实用新型提供一种凸轮驱动缝纫机抬压脚、剪线、松线三合一机构,包括步进电机,所述步进电机的输出轴连接有双层凸轮,所述双层凸轮包括同轴的里层凸轮和外层凸轮,所述里层凸轮向右凸起,所述外层凸轮向左凸起,所述里层凸轮右侧邻近设有压脚旋转轴套,所述压脚旋转轴套套装固定在压脚杠杆的一端,所述压脚杠杆的另一端固定有压脚轴,所述外层凸轮左侧邻近设有推杆,所述推杆的左端固定至轴连接块的一端,所述轴连接块的另一端固定有轴,所述轴上套设固定有弹簧限位块,所述弹簧限位块上固定有松线连杆,所述松线连杆的末端可转动地连接至松线杠杆的一端,所述松线杠杆的另一端固定有松线轴,所述弹簧限位块与所述轴连接块之间套设有复位弹簧,所述轴的右端可转动地连接有剪线刀连杆;所述步进电机正转适于驱动所述里层凸轮向右挤压推动所述压脚旋转轴套,使所述压脚旋转轴套向右移动,进而带动所述压脚杠杆摆动,所述压脚杠杆带动所述压脚轴转动以实现抬压脚动作;所述步进电机反转适于驱动所述外层凸轮推动所述推杆左移,所述推杆带动所述轴连接块左移,所述轴连接块带动所述轴左移,所述轴带动所述弹簧限位块左移,所述弹簧限位块压缩所述复位弹簧的同时带动所述松线连杆左移,所述松线连杆带动所述松线杠杆向左摆动,所述松线杠杆带动所述松线轴转动以实现松线动作,同时,所述轴拉动连接在其右端的剪线刀连杆以实现剪线动作。
5.进一步地,所述推杆上套设有第一轴套,所述推杆适于在所述第一轴套内来回滑动。
6.进一步地,所述轴上,介于所述轴连接块和弹簧限位块之间套设有第二轴套,介于所述弹簧限位块和剪线刀连杆之间套设有第三轴套,所述轴适于在所述第二轴套和第三轴套内来回滑动。
7.进一步地,所述步进电机通过电机固定支架及电机安装支架固定在缝纫机的机壳上。
8.第二方面,本实用新型提供一种缝纫机,包括第一方面任一技术方案所述的凸轮驱动缝纫机抬压脚、剪线、松线三合一机构。
9.与现有技术相比,本实用新型的有益效果是:
10.通过一台电机及双层凸轮即可实现抬压脚、剪线和松线三种动作,结构设计精巧,
操作简便,可大幅提高缝纫机的工作效率,并能有效降低设备成本。
附图说明
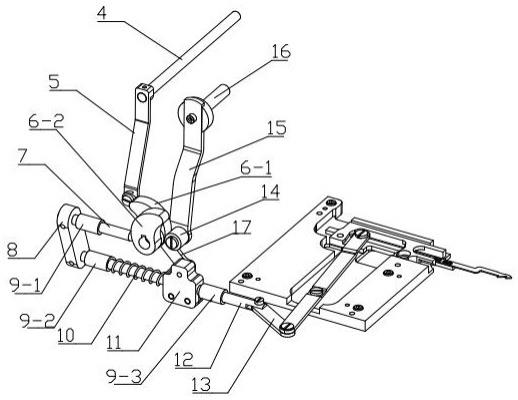
11.图1是本实用新型一个实施例的结构示意图一;
12.图2是本实用新型一个实施例的结构示意图二;
13.图3是本实用新型一个实施例的使用状态图。
14.图中,步进电机1、电机固定支架2、电机安装支架3、松线轴4、松线杠杆5、里层凸轮6-1、外层凸轮6-2、推杆7、轴连接块8、第一轴套9-1、第二轴套9-2、第三轴套9-3、复位弹簧10、弹簧限位块11、轴12、剪线刀连杆13、压脚旋转轴套14、压脚杠杆15、压脚轴16、松线连杆17。
具体实施方式
15.下面结合附图和具体实施例对本实用新型作优选说明。以下描述中涉及的方位词,如“左”、“右”、“里”、
ꢀ“
外”等均是指图1中示出的方位,是为了描述方便,并不是对本实用新型的限制。
16.如图1-图3所示,本实用新型凸轮驱动缝纫机抬压脚、剪线、松线三合一机构的一个实施例,包括步进电机1,所述步进电机1的输出轴连接有双层凸轮,所述双层凸轮包括同轴的里层凸轮6-1和外层凸轮6-2,所述里层凸轮6-1向右凸起,所述外层凸轮6-2向左凸起,所述里层凸轮6-1右侧邻近设有压脚旋转轴套14,所述压脚旋转轴套14套装固定在压脚杠杆15的一端,所述压脚杠杆15的另一端固定有压脚轴16,所述外层凸轮6-2左侧邻近设有推杆7,所述推杆7的左端固定至轴连接块8的一端,所述轴连接块8的另一端固定有轴12,所述轴12上套设固定有弹簧限位块11,所述弹簧限位块11上固定有松线连杆17,所述松线连杆17的末端通过轴位螺钉连接至松线杠杆5的一端,松线杠杆5可围绕该轴位螺钉转动,所述松线杠杆5的另一端固定有松线轴4,所述弹簧限位块11与所述轴连接块8之间套设有复位弹簧10,所述轴12的右端可转动地连接有剪线刀连杆13;所述步进电机1正转适于驱动所述里层凸轮6-1向右挤压推动所述压脚旋转轴套14,使所述压脚旋转轴套14向右移动,进而带动所述压脚杠杆15的下端向右摆动,所述压脚杠杆15带动所述压脚轴16转动以实现抬压脚动作,具体地,压脚轴16的端面上开有长槽,压脚杠杆15嵌装在该长槽内并通过螺钉与压脚轴16固定为一体,压脚轴16的水平位置和垂直位置是固定不变的,压脚杠杆15的摆动必然带动压脚轴16转动;步进电机1复位,带动双层凸轮复位,抬压脚内部机构驱动压脚轴16复位,压脚轴16带动压脚杠杆15复位。所述步进电机1反转适于驱动所述外层凸轮6-2推动所述推杆7左移,所述推杆7带动所述轴连接块8左移,所述轴连接块8带动所述轴12左移,所述轴12带动所述弹簧限位块11左移,所述弹簧限位块11压缩所述复位弹簧10的同时带动所述松线连杆17左移,所述松线连杆17带动所述松线杠杆5向左摆动,所述松线杠杆5带动所述松线轴4转动以实现松线动作,具体地,松线轴4的水平位置和垂直位置都是固定不动的,松线杠杆5摆动实质是绕松线轴4的圆周运动,松线杠杆5和松线轴4通过螺钉固定,两者相对固定,松线杠杆5摆动必然带动松线轴4转动;同时,所述轴12拉动连接在其右端的剪线刀连杆13以实现剪线动作;步进电机1复位,带动双层凸轮6复位,复位弹簧10驱动弹簧限位块11复位,弹簧限位块11带动松线连杆17复位,松线连杆17带动松线杠杆5复位,松线杠杆5带动
松线轴4复位,松线轴4带动松线机构复位,同时弹簧限位块11带动轴12复位,轴12带动轴连接块8和剪线刀连杆13复位,剪线刀连杆13带动剪线刀复位,轴连接块8带动推杆7复位。本实施例中,步进电机1正转可实现抬压脚,反转可实现剪线和松线,其中松线和剪线同步进行,抬压脚和松线剪线互不干涉。松线轴4旋转时带动松线机构(图上未示出)运动来实现松线动作,这部分属于现有技术,不再赘述。类似地,抬压脚动作是通过压脚轴16转动带动抬压脚机构运动来实现,剪线动作是通过剪线刀组件连杆13拉动剪线刀组件来实现,均属于现有技术,不再赘述。
17.在一个实施例中,所述推杆7上套设有第一轴套9-1,所述推杆7适于在所述第一轴套9-1内来回滑动。推杆7的外径与第一轴套9-1的内径相当,第一轴套9-1固定在静止不动的部位上,可对推杆7进行运动导向,有利于推杆7沿预设的轨迹运动,提高运动精度。
18.在一个实施例中,所述轴12上,介于所述轴连接块8和弹簧限位块11之间套设有第二轴套9-2,介于所述弹簧限位块11和剪线刀连杆13之间套设有第三轴套9-3,所述轴12适于在所述第二轴套9-2和第三轴套9-3内来回滑动。第二轴套9-2和第三轴套9-3的固定方式及作用与上述第一轴套9-1类似,不再赘述。
19.在一个实施例中,所述步进电机1通过电机固定支架2及电机安装支架3固定在缝纫机的机壳上。
20.本实用新型缝纫机的一个实施例,包括上述凸轮驱动缝纫机抬压脚、剪线、松线三合一机构的任一实施例中所述的凸轮驱动缝纫机抬压脚、剪线、松线三合一机构,也必然具有其优点,此处不再赘述。
21.本实用新型涉及的控制软件采用现有技术。
22.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。