1.本实用新型涉及田间除草机器人设备技术领域,具体为一种太阳能田间除草机器人。
背景技术:
2.机器人能够在很多的领域代替人工,提高人员的工作效率,为防止田间的杂草影响农作物的生长,需要田间除草机器人设备将田间的杂草进行清除,现有的田间除草机器人设备基本上具有工作速度快、除草效果好、操作简单、工作稳定性高、使用寿命长等优点,能够满足对田间杂草进行快速清除的使用需求,然而,对于现有的田间除草机器人设备而言,一方面,在铲除杂草时,切刀在对杂草进行切断时,切刀容易撞到田间的石块砖块等坚硬物体,进而容易造成切刀被破坏,不利于保障切刀的安全,另一方面,在对田间的石块、砖块等坚硬的物体向外清理时,容易造成除草机器人受到清理机构的反作用力而造成除草机器人行进路线产生偏斜,需要来回的调整,进而降低除草效率。
3.所以,如何设计一种太阳能田间除草机器人,成为我们当前要解决的问题。
技术实现要素:
4.针对现有技术存在的不足,本实用新型目的是提高一种太阳能田间除草机器人,以解决上述背景技术中提出的问题,本实用新型设计合理,使用时较为方便,适用于田间除草使用。
5.为实现上述目的,本实用新型提供如下技术方案:一种太阳能田间除草机器人,包括机器人本体,所述机器人本体包括机器人主体,所述机器人主体的底部焊接有动轮,所述机器人主体的顶部通过螺栓安装有光伏板,所述机器人主体的一侧焊接有支套,所述支套的一侧套设有转筒一,所述转筒一的一侧设置有转筒二,所述转筒一的外边侧套设有皮带一,所述转筒二外边侧套设有皮带二,所述皮带一和皮带二的外边侧均通过螺栓安装有刮片,所述机器人主体的内侧通过螺栓安装有蓄电池,所述机器人主体的内侧通过螺栓安装有电机一,所述电机一的底部安装有滑套,所述滑套的内侧卡有滑竿,所述滑竿的底端焊接有切刀,所述机器人主体的一侧的内壁上通过螺栓安装有电机二,所述电机二的一侧安装有主轴,所述主轴的外边侧焊接有齿轮一,所述支套的一侧安装有齿轮二。
6.作为本实用新型的一种优选实施方式,所述光伏板通过电线与蓄电池连接,所述蓄电池通过电线与机器人主体连接,所述机器人主体通过电线与动轮、电机一和电机二连接。
7.作为本实用新型的一种优选实施方式,所述滑套通过螺栓安装在电机一的输出轴上,所述滑竿和滑套上均开设有销孔,所述销孔的内侧卡有卡销,所述滑竿通过卡销固定在滑套的内侧。
8.作为本实用新型的一种优选实施方式,所述主轴的一端通过螺栓安装在电机二的输出轴上,所述主轴的外边侧通过轴承安装在支套的内侧,所述主轴的另一端穿过支套并
焊接在转筒二的中心处。
9.作为本实用新型的一种优选实施方式,所述转筒一和转筒二的数量均为2个,所述皮带一和皮带二分别套设在两个转筒一和转筒二的外边侧。
10.作为本实用新型的一种优选实施方式,所述转筒一通过轴承安装在支套的外边侧,所述齿轮二通过轴承安装在支套的一侧,所述齿轮一与齿轮二相啮合,所述转筒一的内壁上开设有齿纹,所述齿轮二与齿纹相啮合。
11.有益效果:1.该太阳能田间除草机器人,由于设置有动轮、支套、转筒一、转筒二、皮带一、皮带二、刮片、蓄电池、电机二、主轴、齿轮一和齿轮二,能够在进行除尘作业时,自动地将前方的石块、砖块等坚硬的物体向机器人的两侧清理,进而有效地避免切刀的行进路线上没有坚硬的物体,有效地防止切刀被撞伤,保障切刀的工作安全。2.该太阳能田间除草机器人,由于设置有支套、转筒一、转筒二、皮带一、皮带二、刮片、电机一、滑套、滑竿、切刀、电机二、主轴、齿轮一和齿轮二,能够能够在清除机器人行进路线上的硬块时,有效地将清理硬块产生的反作用力进行相互抵消,进而防止机器人因受到硬块的反作用力而产生偏斜,无需进行校正工作,保障除草效率。
12.3.该太阳能田间除草机器人设计合理,使用时较为高效方便,适用于田间除草使用。
附图说明
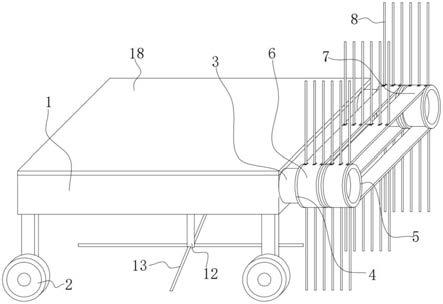
13.图1为本实用新型一种太阳能田间除草机器人的结构示意图;
14.图2为本实用新型一种太阳能田间除草机器人的剖视图;
15.图3为本实用新型一种太阳能田间除草机器人的支套的剖视图;
16.图中:1、机器人主体;2、动轮;3、支套;4、转筒一;5、转筒二;6、皮带一;7、皮带二;8、刮片;9、蓄电池;10、电机一;11、滑套;12、滑竿;13、切刀;14、电机二;15、主轴;16、齿轮一;17、齿轮二;18、光伏板。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.请参阅图1至图3,本实用新型提供一种技术方案:一种太阳能田间除草机器人,包括机器人本体,所述机器人本体包括机器人主体1,所述机器人主体1的底部焊接有动轮2,所述机器人主体1的顶部通过螺栓安装有光伏板18,所述机器人主体1的一侧焊接有支套3,所述支套3的一侧套设有转筒一4,所述转筒一4的一侧设置有转筒二5,所述转筒一4的外边侧套设有皮带一6,所述转筒二5外边侧套设有皮带二7,所述皮带一6和皮带二7的外边侧均通过螺栓安装有刮片8,所述机器人主体1的内侧通过螺栓安装有蓄电池9,所述机器人主体1的内侧通过螺栓安装有电机一10,所述电机一10的底部安装有滑套11,所述滑套11的内侧卡有滑竿12,所述滑竿12的底端焊接有切刀13,所述机器人主体1的一侧的内壁上通过螺栓安装有电机二14,所述电机二14的一侧安装有主轴15,所述主轴15的外边侧焊接有齿轮一
16,所述支套3的一侧安装有齿轮二17,能够有效地利用光伏板18进行发电工作,保障机器人主体1工作时能够实时的补充电能,提高机器人主体1的工作时间,同时有效地利用清洁能源,节省电能消耗。
19.作为本实用新型的一种优选实施方式,所述光伏板18通过电线与蓄电池9连接,所述蓄电池9通过电线与机器人主体1连接,所述机器人主体1通过电线与动轮2、电机一10和电机二14连接,能够在工作时,通过机器人主体1控制动轮2进行转动,进而使得动轮2带动机器人主体1进行移动,并通过机器人主体1根据田间的走向,进而自动的调整动轮2的方向,保障将田间的杂草清除干净。
20.作为本实用新型的一种优选实施方式,所述滑套11通过螺栓安装在电机一10的输出轴上,所述滑竿12和滑套11上均开设有销孔,所述销孔的内侧卡有卡销,所述滑竿12通过卡销固定在滑套11的内侧。
21.作为本实用新型的一种优选实施方式,所述主轴15的一端通过螺栓安装在电机二14的输出轴上,所述主轴15的外边侧通过轴承安装在支套3的内侧,所述主轴15的另一端穿过支套3并焊接在转筒二5的中心处,能够根据不同的需要,将滑竿12在滑套11内上下滑动,当切刀13距离地面的距离到达合适的高度后,将滑竿12通过卡销固定在滑套11内,除草作业时,电机一10通过滑套11带动滑竿12转动,进而使得切刀13快速旋转,当机器人主体1带动切刀13移动到杂草处时,利用切刀13将杂草的根茎处切断,有效地将杂草进行切除。
22.作为本实用新型的一种优选实施方式,所述转筒一4和转筒二5的数量均为2个,所述皮带一6和皮带二7分别套设在两个转筒一4和转筒二5的外边侧。
23.作为本实用新型的一种优选实施方式,所述转筒一4通过轴承安装在支套3的外边侧,所述齿轮二17通过轴承安装在支套3的一侧,所述齿轮一16与齿轮二17相啮合,所述转筒一4的内壁上开设有齿纹,所述齿轮二17与齿纹相啮合,在进行清除杂草的工作时,电机二14带动主轴15转动,一方面,主轴15带动转筒二5转动,进而使得皮带二7带动刮片8转动,另一方面,主轴15通过齿轮一16带动齿轮二17反向转动,进而使得齿轮二17通过与齿纹的啮合带动转筒一4反向转动,进而使得皮带一6带动刮片8反向转动,在机器人主体1移动时,有效地利用刮片8的正转和反转,将石块、砖块等硬物向机器人主体1的两侧拨动,有效地防止切刀13的行进路线上出现硬物,有效地防止切刀13被撞伤,保障切刀13的工作安全,同时皮带一6和皮带二7上的刮片移动方向相反,其受到杂草、地面和硬物的反作用力相互抵消,进而防止机器人主体1因受到硬块的反作用力而产生偏斜,无需进行校正工作,保障除草效率,当除草作业完成后,通过机器人主体1控制动轮2反向转动,同时关闭电机一10,电机二14工作,使得皮带一6和皮带二7带动刮片8将切断的杂草向两侧清理,便于杂草的收集工作。
24.该太阳能田间除草机器人通过蓄电池9为所有用电设备提供电能,在工作时,通过机器人主体1控制动轮2进行转动,进而使得动轮2带动机器人主体1进行移动,并通过机器人主体1根据田间的走向,进而自动的调整动轮2的方向,保障将田间的杂草清除干净,根据不同的需要,将滑竿12在滑套11内上下滑动,当切刀13距离地面的距离到达合适的高度后,将滑竿12通过卡销固定在滑套11内,除草作业时,电机一10通过滑套11带动滑竿12转动,进而使得切刀13快速旋转,当机器人主体1带动切刀13移动到杂草处时,利用切刀13将杂草的根茎处切断,有效地将杂草进行切除,在进行清除杂草的工作时,电机二14带动主轴15转
动,一方面,主轴15带动转筒二5转动,进而使得皮带二7带动刮片8转动,另一方面,主轴15通过齿轮一16带动齿轮二17反向转动,进而使得齿轮二17通过与齿纹的啮合带动转筒一4反向转动,进而使得皮带一6带动刮片8反向转动,在机器人主体1移动时,有效地利用刮片8的正转和反转,将石块、砖块等硬物向机器人主体1的两侧拨动,有效地防止切刀13的行进路线上出现硬物,有效地防止切刀13被撞伤,保障切刀13的工作安全,同时皮带一6和皮带二7上的刮片移动方向相反,其受到杂草、地面和硬物的反作用力相互抵消,进而防止机器人主体1因受到硬块的反作用力而产生偏斜,无需进行校正工作,保障除草效率,当除草作业完成后,通过机器人主体1控制动轮2反向转动,同时关闭电机一10,电机二14工作,使得皮带一6和皮带二7带动刮片8将切断的杂草向两侧清理,便于杂草的收集工作。
25.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。