1.本发明属于农业机械技术领域,具体涉及一种适用于麦田的智能仿生除草机。
背景技术:
2.目前常见的行间除草机械有旋耕式除草机、笼式除草机、轮式除草机、毛刷式除草机等。笼式除草机的每个旋转除草装置是由安装在水平轴上的两个内外交错旋转除草笼组成,通过对土壤表面进行挫伤以消除杂草,该机主要适用于易碎的土壤环境且只适合于高度小于20mm的杂草。毛刷式除草机根据毛刷轴的方向可以分为水平毛刷式和垂直毛刷式。水平毛刷式除草机只适合于行间杂草,垂直毛刷式除草机既可以行间除草也可以在株间除草,这两种除草机械入土深度在20-30mm,且只适用于小草。
3.株间除草机械将机械结构和机器视觉、自动导航技术、液压技术集合于一体形成智能、高效、精准的除草机械,大大提高了除草效果。常见的除草工作部件有旋转锄式、弹齿式、圆盘式、圆盘式、链齿式、轻耙式等多种型式。其工作原理多数是利用安装在机器上的摄像头拍摄照片,然后利用图像处理技术识别行间和作物株间杂草的精确位置,最后利用电脑控制的液压系统使除草部件以特定的运动形式除去田间杂草。
4.虽然传统的除草机械可高效率的去除行间杂草,但麦田中有些杂草更多地接近小麦幼苗,传统的除草机械不能满足对幼苗间杂草的控制要求,传统除草轮在作业时存在盲区,只能去除行间杂草,对靠近小麦的杂草无法彻底清除。另一方面随着麦田中粘重土壤日益增多,现有的除草机除草轮在粘重土壤条件下碎土、除草效果差,作业功耗大,土壤易黏附在除草轮上,影响除草效果。
技术实现要素:
5.本发明提供一种可同时防治行间和行内杂草、作业功耗较低的仿生智能麦田除草机械。
6.本发明采用的技术方案:一种适用于麦田的智能仿生除草机,包括机架,机架包括第一横杆、第二横杆、第三横杆及与各横杆垂直设置的纵杆,第一横杆下方设有传动轴,除草轮通过链箱与传动轴连接,机架上还安装有电动机,电动机输出轴与传动轴链传动,传动轴链传动除草轮,除草轮及传动轴上均设有链轮,链轮及传动链均位于链箱内,链箱与机架之间设有拉杆;所述除草轮上均匀分布有除草刀片,除草刀片的刀背上均匀分布有波纹凸起,波纹凸起垂直于除草刀片的长度方向,除草刀片沿前进方向的前端设置刀刃;第二横杆下方通过固定架均匀设置有由步进电机驱动的智能除草爪,固定架上设有摄像头,摄像头及步进电机均连接控制器。
7.所述波纹凸起符合特征曲线方程y = 0.0388sin(13.12x+3.472),x表示波纹凸起底边的位置坐标,0《 x 《 7.854。
8.所述智能除草爪包括外套筒和梯形丝杆,梯形丝杆位于外套筒内部,步进电机通
过联轴器连接梯形丝杆,梯形丝杆上设有丝杆螺母,丝杆螺母侧壁铰接有第一连接杆,第一连接杆的另一端自外套筒伸出,铰接第二连接杆,第二连接杆上部分为连杆,下部分为向内折弯的抓杆,外套筒下端侧边均匀设置铰接点,第二连接杆中间部位通过第三连接杆与外套筒下端侧边的铰接点铰接;外套筒上端连接固定板,固定板侧边还连接有固定架。
9.第二连接杆的连杆与抓杆之间形成夹角α,150
°
<α<170
°
。
10.抓杆末端设置刀刃部。
11.第一连接杆与外套筒下端侧边的铰接点均为三个,对应位置的第一连接杆与铰接点在同一竖直线上,相邻第一连接杆之间夹角及相邻铰接点之间的夹角均为120
°
。
12.外套筒下端连接底托,底托上均匀开设供铰接点伸出外套筒的u型槽。
13.机架上均匀设置有10个智能除草爪和10个除草轮。
14.每个除草轮上有7个除草刀片。
15.机架的两侧边还分别设置限深轮,限深轮固定与第三横杆上。
16.(1)与传统除草轮相比,仿生除草轮的设计使得除草机械在粘重土壤环境下工作时土壤粘附率更低,阻力更小,功耗更低。
17.(2)智能除草爪的设计,使得靠近小麦的杂草能被定点清除,可提高麦田除草的效率。
18.(3)仿生除草轮与智能机械手相结合是一种新型除草组合方式。行间采用除草轮机械除草,行内采用智能机械手,识别杂草,定点除草。既能全方位机械除草,又能提高除草速度。
附图说明
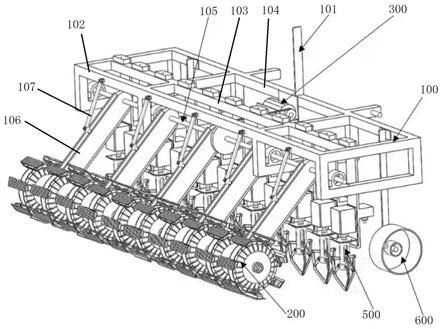
19.图1为本发明的结构示意图。
20.图2为本发明的侧面示意图。
21.图3为除草刀片的结构示意图。
22.图4为除草轮的结构示意图。
23.图5为智能除草爪结构示意图。
24.图6为智能除草爪的丝杠螺母及第一连接杆的结构示意图。
25.图7为智能除草爪的第二连接杆的结构示意图。
26.图8为智能除草爪的第三连接杆的结构示意图。
27.图9为智能除草爪的底托的结构示意图。
28.图10为智能除草爪的外套筒的结构示意图。
29.图11为智能除草爪合拢状态示意图。
具体实施方式
30.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的其他所有实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本
发明的选定实施方式。
31.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
32.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
33.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
34.如图1、图2所示,一种适用于麦田的智能仿生除草机,包括机架100,机架100通过三点悬挂机构101固定于农用机上,如拖拉机,机架100包括第一横杆102、第二横杆103、第三横杆104及与各横杆垂直设置的纵杆,第一横杆102下方设有传动轴105,除草轮200通过链箱106与传动轴105连接,机架100上还安装有电动机300,电动机300输出轴与传动轴105链传动,传动轴105链传动除草轮200,除草轮200及传动轴105上均设有链轮,链轮及传动链(图中未显示)均位于链箱106内,链箱106与机架100之间设有拉杆107;所述除草轮200上均匀分布有除草刀片400,除草刀片400与刀背相对的另一面焊接有u型支架405,除草刀片400通过u型支架405及螺栓固定连接在除草轮200上,除草刀片400的刀背401上均匀分布有波纹凸起403,波纹凸起403垂直于除草刀片400的长度方向,除草刀片400沿前进方向的前端设置刀刃402,见图3、图4;第二横杆103下方通过固定架11均匀设置有由步进电机1驱动的智能除草爪500,固定架11上设有摄像头12,摄像头12及步进电机1均连接控制器(图中未显示);第三横杆104的左右两侧均设置有限深轮600。
35.贝壳长期存在于在海边泥沙中,经历了海浪与砂石的磨损,却表现出良好的疏水性与耐磨性,如此优异的性能与其表面的棱纹结构密不可分。故利用三维激光扫描仪对贝壳进行3d扫描,获得三维数据点云图;之后对其进行三维实体重构;提取轮廓特征曲线数据坐标值;用图像与数据处理软件对坐标值进行曲线拟合,得拟合特征曲线方程y = 0.0388sin(13.12x+3.472), x表示波纹凸起403底边的位置坐标,0《 x 《 7.854。将拟合特征曲线应用到除草轮的刀片上(刀背),得仿生除草刀片,之后将仿生除草刀片应用到除草轮中。仿生波纹凸起设计使得除草刀片在进行除草时具有入土性能好,疏土性能好,不粘刀,阻力小,耐磨,降低能耗,值得推广使用。
36.如图5-11所示,所述智能除草爪,外套筒3和梯形丝杆6,梯形丝杆6位于外套筒3内部,步进电机1通过联轴器2连接梯形丝杆6,梯形丝杆6上设有丝杆螺母7,丝杆螺母7侧壁铰接有第一连接杆4,如图6所示,丝杆螺母7侧边有方形槽71,第一连接杆4端部设有方形挡头41,方形挡头41置于方形槽71内,且可以在方形槽71内沿丝杆螺母7周向旋转,第一连接杆4的另一端自外套筒3伸出,铰接第二连接杆5,第二连接杆5上部分为连杆51,下部分为向内折弯的抓杆52,向内折弯即是向梯形丝杆中心线方向,也即是实现抓杆52合拢的方向,第二
连接杆的连杆与抓杆之间形成夹角α,150
°
<α<170
°
,优选160
°
,抓杆52末端设置刀刃部53;外套筒3下端侧边均匀设置铰接点9,第二连接杆5中间部位通过第三连接杆6与外套筒3下端侧边的铰接点9铰接;第一连接杆4与外套筒3下端侧边的铰接点9均为3个,上下对应位置的第一连接杆4与铰接点9在同一竖直线上,相邻第一连接杆4之间夹角及相邻铰接点9之间的夹角均为120
°
。外套筒3上端为法兰结构,通过螺栓连接固定板10,固定板10侧边还连接有固定架11,固定架11上设有摄像头12,摄像头及步进电机1均连接控制器(图中未显示)。外套筒3下端连接底托8,底托8上均匀开设供铰接点9伸出外套筒3的u型槽81。
37.根据机械手的设计原则,以及麦田杂草的生物学特性和其生长环境,确定智能除草机械爪的三维模型如图5所示,摄像头采集麦田杂草信息,传输到控制器,经控制器处理后若识别田间杂草,则stm32单片机响应,向步进电机1驱动器发出指令,步进电机1工作,步进电机1转动,通过联轴器2将扭矩传递给安装有丝杆螺母7的梯形丝杆6,步进电机1带动梯形丝杆6绕中心轴旋转时,丝杆螺母7便沿着梯形丝杆6上下移动。智能机械爪的抓手机构由第三连接杆6、第二连接杆5、第一连接杆4组成,丝杆螺母7上铰接有三个第一连杆4,相邻第一连杆4之间相隔120
°
,使得第一连杆4能够随着丝杆螺母7作平面运动。外套筒3下端铰接有三个第三连接杆6,第三连接杆6与第二连接杆5的抓杆52铰接,使得抓杆52能够绕着第三连接杆6作圆周运动,而抓杆末端的刀刃部53则作向下并向中心轴收紧的运动,见图11,从而实现清除动作。若未识别到田间杂草,则该除草爪保持原状态,见图5。
38.将机器视觉与传统机械爪组合起来应用于麦田除草,可实现对麦田的定点除草,对于靠近小麦的杂草清除效果极佳,提高了除草效率。另外该机械爪结构简单,可操作性强。
39.机架上均匀设置有10个智能除草爪和10个除草轮,每个除草轮上有7个除草刀片。10个智能除草爪和10个除草轮,以及每个除草轮上有7个除草刀片仅是一个举例说明,并不限定智能除草爪、除草轮及除草刀片的数量,参考实际生产、生产成本等众多因素,对其数量进行改进也属于本发明的保护范围。
40.该智能仿生除草机尤其适用于麦田,可同时进行10行麦田杂草清除任务。主要由三大部分组成:机架,除草轮,智能除草爪。除草机机架通过三点悬挂与拖拉机后方相连,由拖拉机带动整个除草机前进进行作业。机架上的电动机由蓄电池供电,从而带动除草轮旋转进行工作:电动机输出轴通过链传动与机架上的传动轴相连,传动轴上有五个链轮,通过链传动分别与五组除草轮上的链轮相连,从而带动除草轮旋转达到除草的目的。与机架相连的还有两个限深轮600,起支撑作用,限制除草轮的入土深度。智能机械爪将机器视觉识别系统、驱动器、除草机构等有机结合起来,使得机器视觉在识别到田间杂草时,单片机响应,驱动机械爪进行定点清除,否则机械爪将保持原状态。