1.本实用新型属于农业机械技术领域,具体为一种棚室内果菜行距动态调整机构。
背景技术:
2.提高设施蔬菜生产的机械化水平、用机器替代人,是解决当前设施蔬菜产业中劳动力不足问题、降低用工成本的重要方式,也是发展现代化农业的重要内容。通过对蔬菜栽培工艺进行调整,构建宜机化的栽培模式,创造适宜现有农机装备作业的条件,可以有效地提高蔬菜生产的机械化水平。
[0003]“宽沟窄畦”是一种十分具有推广潜力的宜机化栽培模式:将日光温室与塑料大棚的垄向调整为沿着屋脊的长度方向,并增大沟底宽、减小垄顶宽。垄向调整使得种植行短行变长行,减少了机具作业时换行掉头次数,确保了机具的高效运行。增大沟底宽(宽沟)以便于机具在垄沟行走,同时有利于两垄之间的通风透光。减小垄顶宽(窄畦)是为了保证棚室内的种植密度,从而保证该模式下的产量,但“窄畦”的设置使得垄内植株过于密集,从而引起了采光不足、通风不足的问题。
[0004]
具体的,在“宽沟窄畦”的宜机化栽培模式下,“窄畦”使得同一垄上的两行植株之间行距变小,造成两行之间相互遮光;同时由于植株较为密集使得冠层空气流动缓慢、通风困难。采光不足、通风不足在一定程度上影响了蔬菜产量和质量,成为“宽沟窄畦”宜机化栽培模式推广的主要限制因素。具体到果菜来说,由于番茄、黄瓜等果类蔬菜在长到一定高度,不能继续直立生长时,需要在吊蔓杆上进行吊蔓——顺着种植行拉一根长杆用于吊蔓,将吊绳的上端固定在拉设好的吊蔓杆上,下端固定在植株上。“宽沟窄畦”模式下,在同一垄内,吊蔓后的果菜植株由于种植密集,两行之间相互遮挡阳光、冠层空气流动缓慢。
[0005]
因此,需要一种装备或者方法来解决、避免“宽沟窄畦”宜机化栽培模式下垄内由于垄内密植导致的垄内两种植行之间相互遮光、空气流动缓慢的难题。
技术实现要素:
[0006]
针对需要吊蔓的番茄、黄瓜等果菜类作物在“宽沟窄畦”宜机化栽培模式下,垄内光照不足、通风不足导致蔬菜叶片有早衰现象,且下部叶片变黄明显,发生果实小、产量低的问题;本实用新型提供了一种棚室内果菜行距动态调整机构,其特征在于,包括:大棚、电动机、减速器、卷绳杆、控制绳环组、吊蔓杆组和托杆线;其中卷绳杆通过轴承安装于大棚的一侧,卷绳杆的一端通过减速器与电动机相连;大棚内部拉有至少两条相互平行的托杆线;托杆线均与垄向垂直;托杆线上放置有对数与垄数相等吊蔓杆组,每对吊蔓杆组均位于一条垄的正上方,吊蔓杆组包括近侧吊蔓杆和远侧吊蔓杆,两端均设有至少一组与卷绳杆相连的控制绳环组近侧吊蔓杆和远侧吊蔓杆下方均设有若干组与下方果菜种植位置对应的吊绳组,吊绳组的下部于位置吊蔓点夹持下方所种植果菜的茎秆;所述近侧吊蔓杆运行至最近端位置和最远端位置处的托杆线上各固定一个行程开关。
[0007]
所述控制绳环组由一根近侧绳环、一根远侧绳环、线轴、四个直角转向定滑轮和两
个半圆转向定滑轮组成,其中线轴安装于卷绳杆上,直角转向定滑轮挂装于大棚与卷绳杆同侧的棚架下,半圆转向定滑轮挂装于大棚另一侧的棚架下;近侧绳环的一端与吊蔓杆组中的近侧吊蔓杆固接,近侧绳环经过一个半圆转向定滑轮、一个直角转向定滑轮、线轴和另一个直角转向定滑轮最终另一端与近侧吊蔓杆固接;远侧绳环的一端与吊蔓杆组中的远侧吊蔓杆固接;远侧绳环同样经过一个半圆转向定滑轮、一个直角转向定滑轮、线轴和另一个直角转向定滑轮最终与远侧吊蔓杆固接。
[0008]
所述相邻的直角转向定滑轮之间的间距为0.25m~0.3m。
[0009]
所述近侧绳环和远侧绳环在线轴上紧密缠绕。
[0010]
所述吊蔓杆组中两根吊蔓杆的最远距离为1.3m。
[0011]
所述控制绳环组之间的间隔至少为4m。
[0012]
所述托杆线保持绷紧。
[0013]
本实用新型的有益效果在于:
[0014]
1.通过对两行吊蔓杆的间距进行调整,实现了垄内行距的动态调整。常态下,两根吊蔓杆相互远离并保持一定距离,使得同一垄内相邻两行的植株冠层向外张开,扩大了行距,便于采光和空气流通;操作人员或机具进入垄间作业时,两吊蔓杆的间距缩小,行距变小、垄间距增大,便于人员与机具通过。
[0015]
2.对“宽沟窄畦”宜机化栽培模式进行了完善,提升了行内的光照和通风性能,可极大地推动“宽沟窄畦”模式的推广应用,进而提升设施蔬生产的机械化水平。
附图说明
[0016]
图1为本实用新型一种棚室内果菜行距动态调整机构实施例中略去控制绳环组和卷绳杆后的结构示意图;
[0017]
图2是“宽沟窄畦”宜机化栽培模式垄面参数;
[0018]
图3是一种棚室果菜动态调整机构实施例的机构原理简图;
[0019]
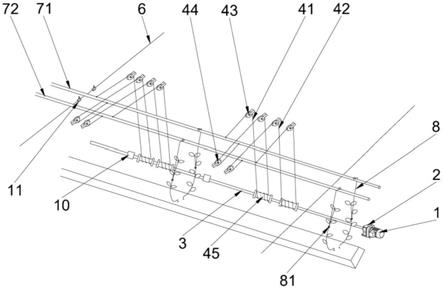
图4为一种棚室果菜动态调整机构实施例的结构示意图;
[0020]
图5为图4在a处的局部放大图。
[0021]
其中:1.电动机,2.减速器,3.卷绳杆,6.托杆线,8.吊绳,9.大棚,10.轴承,11.行程开关,41.近侧绳环,42.远侧绳环,71.近侧吊蔓杆,72.远侧吊蔓杆,43.直角转向定滑轮,44.半圆转向定滑轮,45.线轴,81.吊蔓点。
具体实施方式
[0022]
以下结合附图对本实用新型作进一步的详细说明。
[0023]
如图1和图2所示的本实用新型实施例,包括:大棚9、电动机1、减速器2、卷绳杆3、控制绳环组、吊蔓杆组和托杆线6;其中卷绳杆3通过轴承10安装于大棚9一侧的地面(棚架)上,卷绳杆3的一端通过减速器2与电动机1相连;大棚内部拉有至少两条相互平行的托杆线6;托杆线6保持绷紧,且均与垄向垂直;托杆线6上放置有对数与垄数相等吊蔓杆组,每对吊蔓杆组均位于一条垄的正上方,吊蔓杆组包括近侧吊蔓杆71和远侧吊蔓杆72,两端均设有至少一组与卷绳杆3相连的控制绳环组;近侧吊蔓杆71和远侧吊蔓杆72下方均设有若干组与下方果菜种植位置对应的吊绳组8,吊绳组8的下部于位置吊蔓点81夹持下方所种植果菜
的茎秆。
[0024]
在本实施例中,所使用的宜机化大棚9的跨度为9.6m,高4.5m,托杆线6垂直于栽培垄的方向固定在大棚9的骨架上。
[0025]
本实施例采用的“宽沟窄畦”宜机化栽培模式具体参数如下:棚内有五条栽培垄和五组吊蔓杆组,垄向与大棚屋脊长度方向相同,垄距1600mm,垄顶宽500mm,垄底宽700mm,垄高200mm,沟底宽900mm,行距为300mm。但,在传统双行栽培模式下,以番茄为例,机械化起垄常用参数为:垄顶宽700~800mm,垄底宽90~100mm,沟底宽400mm,行距400mm。从以上对比可以看出,“宽沟窄畦”模式即对传统双行栽培模式进行宜机化调整,如:减小垄顶宽、减小行距、增大沟底宽,使其有利于机具进入作业,提高机械化水平;但同时,北侧行的果实小、产量低以及北侧行叶片有早衰现象等现象的发生也成为难以避免的问题。
[0026]
如图3~图5所示,一组控制绳环组包括:一根近侧绳环41、一根远侧绳环42、两个线轴45、四个直角转向定滑轮43和两个半圆转向定滑轮44,其中线轴45安装于卷绳杆3上,直角转向定滑轮43挂装于大棚9与卷绳杆3同侧的棚架下,半圆转向定滑轮44挂装于大棚9另一侧的棚架下;
[0027]
近侧绳环41的一端与某一组吊蔓杆组中的近侧吊蔓杆71固接,近侧绳环41经过一个半圆转向定滑轮44、一个直角转向定滑轮43、一线轴45和另一个直角转向定滑轮43最终另一端与近侧吊蔓杆71固接;其他组吊蔓杆组中近侧吊蔓杆71也与近侧绳环41固接;远侧绳环42的一端与某一组吊蔓杆组中的远侧吊蔓杆72固接;远侧绳环42同样经过一个半圆转向定滑轮44、一个直角转向定滑轮43、另一线轴45和另一个直角转向定滑轮43最终与远侧吊蔓杆72固接;其他组吊蔓杆组中远侧吊蔓杆72也与远侧绳环42固接;
[0028]
近侧绳环41和远侧绳环42均经过半圆转向定滑轮44、直角转向定滑轮43、线轴45和另一个直角转向定滑轮43四次转向,且近侧绳环41或远侧绳环42两端均与同一根近侧吊蔓杆71或远侧吊蔓杆72固接;从而使得近侧绳环41和远侧绳环42各自和形成一个可以随着卷绳杆3转动而转动的封闭绳环;
[0029]
在本实施例中,近侧绳环41和远侧绳环42在线轴45上等间距紧密缠绕数圈,用以确保足够的摩擦力以拉动近侧吊蔓杆71和远侧吊蔓杆72;
[0030]
在本实施例中,多组拉绳联合驱动五组吊蔓杆组,为表示简洁图4中只画出一组,每组控制绳环组内均设有一根近侧绳环41和一根远侧绳环42,同组内相邻的直角转向定滑轮43之间的间距为0.25m~0.3m,两组控制绳环组之间的间隔为4m~5m。
[0031]
在本实施例中,在至少一根近侧吊蔓杆71运行至最近端位置和最远端位置处的托杆线上各固定一个行程开关11,对吊蔓杆的移动幅度和位置进行限定和监控。
[0032]
在本实施例中,如图5所示,托杆线6、半圆转向定滑轮44和直角转向定滑轮43均吊装在两侧山墙内一根单独设置的安装杆上;容易理解的是,如果在所需要位置设有拉杆,也可以直接安装在拉杆上。
[0033]
本机构适用于塑料大棚或日光温室“宽沟窄畦”宜机化栽培模式下,垄内行距的动态调整,使用方法为:
[0034]
电动机是动力源,通过减速器带动卷绳杆进行低速高扭的转动;卷绳杆通过轴承座固定在地面,能够在电动机的带动下实现正反转;每对吊蔓杆组中的两根吊蔓杆(近侧吊蔓杆71和远侧吊蔓杆72)根据卷绳杆的旋转,沿托杆线方向进行反向的水平往复移动。
[0035]
具体的,在两个步骤中循环:
[0036]
步骤a、常态下:
[0037]
当植株正常生长也就是非人员和机具作业的状态下,电动机1带动卷绳杆3逆时针转动,吊蔓杆组中的两根吊蔓杆均相互远离并外张至1.3m间距,吊蔓杆的高度均为2.4m,两根吊蔓杆通过吊绳8使得一对吊蔓点81之间的距离变大,同一垄内植株的最大行距变大,有效改善因行距较窄造成的植株相互遮光、通风不足的问题;
[0038]
步骤b、垄间作业时:
[0039]
当人员或者机具需要进入垄间作业时,电动机1带动卷绳杆3顺时针转动,两根吊蔓杆相互靠近,通过吊绳8使得两行植株上一对吊蔓点81之间的距离变小,同一垄内植株的行距减小,垄沟可供人员或农机具通过;作业完成后,电动机1逆时针转动,恢复作业前的状态。