1.本实用新型涉及植树造林用设备技术领域,具体为一种荒山造林用除草装置。
背景技术:
2.在荒山造林过程中,荒山上的杂草茂盛,工作人员需要清理杂草,用以处理出树苗移栽穴,同时避免高大的杂草抢夺土壤水分及营养。随着社会经济的不断发展,社会的生产力也在不断的发展进步,除草的机械化提高了除草的工作效率,省时省力,方便人们使用。
3.但是现有的除草装置,不够自动化,还需要人工操作,提高了人力成本。因山地砂石多,在除草时,无法躲避石头,而极易使刀片损坏,进而无法应用,同时当刀头在运行时碰到石头,飞溅出的砂石容易伤到周围的人或动物,造成不必要的损失,且现有的除草装置仅可切割根茎,草根不能有效清理,使杂草复生,同时也不利于挖取移栽穴。为了解决现有的除草装置所存在的缺点与不足,目前急需改善除草装置的技术,使之更加便捷的供人们使用,提高除草装置使用效率。
技术实现要素:
4.本实用新型的目的在于针对上述的不足,提供一种荒山造林用除草装置,无需人工操作,可有效清理草根,防止杂草复生,有效自动躲避砂石,避免砂石对刀头的损坏,同时可有效避免除草装置在运行过程中对周围人员安全的威胁,高效除草。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种荒山造林用除草装置,包括小车本体本体,所述小车本体的顶部设有控制器和驱动机构,所述小车本体的车架前端固定设置有定位机构,所述小车本体的底部固定设置有伸缩机构,所述伸缩机构的伸出端可拆卸连接有刀头,所述刀头包括割除刀头和锄根刀头。
7.进一步,所述小车本体采用履带式小车。
8.进一步,所述定位机构包括倒l型安装架、距离感应器和高度感应器,所述安装架的竖向部与所述小车本体的车架前端固定连接,所述距离感应器与所述安装架的竖向部固定连接,所述高度感应器与所述安装架的横向部的底部固定连接。
9.进一步,所述距离感应器采用红外感应器,所述高度感应器采用超声波感应器。
10.进一步,所伸缩机构包括旋转电机,所述旋转电机的输出轴竖直向下伸出固定连接有电动伸缩杆,所述电动伸缩杆的伸出端可拆卸连接有刀头。
11.本实用新型的有益效果是:
12.实际应用中,所述小车本体带动整个装置自动移动除草,无需人工操作,所述定位机构有效定位杂草及砂石与小车本体的距离,同时还可定位砂石的高度并反馈给控制器,所述控制器控制所述伸缩机构驱动所述刀头自动躲避砂石同时旋转除草,避免砂石对刀头的损坏,除草时,可先用割除刀头割除杂草根茎,再切换锄根刀头,铲除杂草根部,防止杂草复生,有利于挖取移栽穴。
附图说明
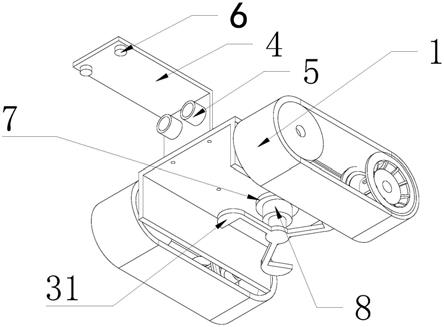
13.图1是本实用新型的整体结构示意图;
14.图2是本实用新型的俯视图;
15.图3是锄根刀头的结构示意图;
16.附图标记:小车本体1;控制器2;割除刀头31;锄根刀头32;安装架4;距离感应器5;高度感应器6;旋转电机7;电动伸缩杆8。
具体实施方式
17.如图1至图3所示,一种荒山造林用除草装置,包括小车本体1,所述小车本体1的顶部设有控制器2和驱动机构,所述小车本体1的车架前端固定设置有定位机构,所述小车本体1的底部固定设置有伸缩机构,所述伸缩机构的伸出端可拆卸连接有刀头,所述刀头包括割除刀头31和锄根刀头32。
18.实际应用中,所述小车本体1带动整个装置自动移动除草,无需人工操作,所述定位机构有效定位杂草及砂石与小车本体1的距离,同时还可定位砂石的高度并反馈给控制器5,所述控制器5控制所述伸缩机构驱动所述刀头自动躲避砂石同时旋转除草,避免砂石对刀头的损坏,除草时,可先用割除刀头割31除杂草根茎,再切换锄根刀头32,铲除杂草根部,防止杂草复生,有利于挖取移栽穴。
19.如图1至图3所示,所述小车本体1采用履带式小车;本实施例中,小车本体1采用履带式小车,能在除草过程中有效避免小车本体 1行驶不稳定导致侧翻,提高除草效率。
20.如图1至图3所示,所述定位机构包括倒l型安装架4、距离感应器5和高度感应器6,所述安装架4的竖向部与所述小车本体1的车架前端固定连接,所述距离感应器5与所述安装架4的竖向部固定连接,所述高度感应器6与所述安装架4的横向部的底部固定连接;本实施例中,反别连接在所述安装架4竖向部和横向部的所述距离感应器5和高度感应器6采集的小车本体1与杂草之间的距离信息以及小车本体1与砂石之间的高度信息反馈反馈给所述控制器2。
21.如图1至图3所示,所述距离感应器5采用红外感应器,所述高度感应器6采用超声波感应器;本实施例中,采用红外红外感应器采集小车本体1与杂草之间的距离信息,采用超声波感应器采集小车本体1与砂石之间高度信息。
22.如图1至图3所示,所述伸缩机构包括旋转电机7,所述旋转电机7的输出轴竖直向下伸出固定连接有电动伸缩杆8,所述电动伸缩杆8的伸出端可拆卸连接有刀头;本实施例中,所述旋转电机7驱动所述电动伸缩杆8旋转,所述控制器2根据所述定位机构反馈的信息控制调整所述电动伸缩杆8伸出的长度,进而控制小车本体1的行驶以及所述刀头避开砂石进行除草。
23.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神所定义的范围。
技术特征:
1.一种荒山造林用除草装置,其特征在于:包括小车本体(1),所述小车本体(1)的顶部设有控制器(2)和驱动机构,所述小车本体(1)的车架前端固定设置有定位机构,所述小车本体(1)的底部固定设置有伸缩机构,所述伸缩机构的伸出端可拆卸连接有刀头,所述刀头包括割除刀头(31)和锄根刀头(32)。2.根据权利要求1所述的一种荒山造林用除草装置,其特征在于:所述小车本体(1)采用履带式小车。3.根据权利要求1所述的一种荒山造林用除草装置,其特征在于:所述定位机构包括倒l型安装架(4)、距离感应器(5)和高度感应器(6),所述安装架(4)的竖向部与所述小车本体(1)的车架前端固定连接,所述距离感应器(5)与所述安装架(4)的竖向部固定连接,所述高度感应器(6)与所述安装架(4)的横向部的底部固定连接。4.根据权利要求3所述的一种荒山造林用除草装置,其特征在于:所述距离感应器(5)采用红外感应器,所述高度感应器(6)采用超声波感应器。5.根据权利要求1所述的一种荒山造林用除草装置,其特征在于:所述伸缩机构包括旋转电机(7),所述旋转电机(7)的输出轴竖直向下伸出固定连接有电动伸缩杆(8),所述电动伸缩杆(8)的伸出端可拆卸连接有刀头。
技术总结
本实用新型涉及植树造林用设备技术领域,具体为一种荒山造林用除草装置,包括小车本体,所述小车本体的顶部设有控制器和驱动机构,所述小车本体的车架前端固定设置有定位机构,所述小车本体的底部固定设置有伸缩机构,所述伸缩机构的伸出端可拆卸连接有刀头,所述刀头包括割除刀头和锄根刀头;实际应用中,所述小车本体带动整个装置自动移动除草,无需人工操作,所述定位机构有效定位杂草及砂石与小车本体的距离,同时还可定位砂石的高度并反馈给控制器,所述控制器控制所述伸缩机构驱动所述刀头自动躲避砂石同时旋转除草,避免砂石对刀头的损坏,除草时,可先用割除刀头割除杂草根茎,再切换锄根刀头,铲除杂草根部,防止杂草复生。复生。复生。
技术研发人员:孟卫东
受保护的技术使用者:青海道康农牧科技有限公司
技术研发日:2021.03.24
技术公布日:2022/2/8