1.本实用新型涉及用于挤奶机的机械抓手技术领域,具体为一种用于挤奶机的机械抓手。
背景技术:
2.机械抓手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门,在挤奶机中也常常会用到机械抓手,一般的挤奶机会配备有盛装挤出的奶水的奶杯,这些挤奶杯需要用机械抓手来夹持。现有技术下的机械手机构复杂,制造成本高,不适用于小型厂家的使用。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种用于挤奶机的机械抓手。
4.为实现上述目的,本实用新型提供如下技术方案:一种用于挤奶机的机械抓手,包括电动推杆、顶板、侧板、固定连杆、夹爪、导杆接头、中间杆、连接杆、销轴、开口销;顶板套接电动推杆,所述顶板的两侧均安装一个侧板,每个侧板上均安装一组固定连杆,所述固定连杆均与对应的夹爪铰接,所述电动推杆上安装导杆接头,所述导杆接头连接中间杆,所述中间杆的两侧分别铰接一个连接杆,所述连接杆与固定连杆铰接,所述连接杆与固定连杆之间插有销轴,所述销轴上插接开口销。
5.优选地,所述夹爪上均装有一层橡胶垫。
6.优选地,所述夹爪上安装有一个光电感应器。
7.本实用新型的有益效果是:本实用新型所提供的一种用于挤奶机的机械抓手以电动推杆为动力源,并且在电动推杆上加装了一些简单的机械元件,即能完成自动夹取奶杯的工作,且该机械爪手结构简单,造价低廉,适用于小型厂家的使用。
附图说明
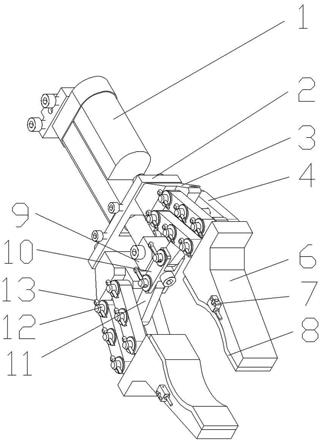
8.图1为本实用新型的基本结构示意图;
9.图2为本实用新型的主视图。
具体实施方式
10.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
11.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽
度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
12.如图1至图2所示,本实用新型提供的一种用于挤奶机的机械抓手包括电动推杆1、顶板2、侧板3、固定连杆4、夹爪6、导杆接头9、中间杆10、连接杆11、销轴12、开口销13;顶板2上设有开口,顶板2套接电动推杆1,所述顶板2的两侧均安装一个侧板3,每个侧板3上均安装一组固定连杆4,此实施例中,每个侧板3上安装的固定连杆4的数量为两个,使用两个固定连杆保证了机械抓手的稳固性,同侧的两个所述固定连杆4铰接对应的夹爪6。
13.所述夹爪6上均装有一层橡胶垫8,在机械抓手夹持奶杯时不会损坏杯体,所述夹爪6上安装有一个光电感应器7,所述光电感应器7与电动推杆1的控制端相连。
14.所述电动推杆1上安装导杆接头9,所述导杆接头9连接中间杆10,所述中间杆10的两侧分别铰接一个连接杆11,所述连接杆11与对应的一个固定连杆4铰接,连接杆11与所述固定连杆4上均开设有孔,所述连接杆11与固定连杆4之间插有销轴12,所述销轴12上插接开口销13,所述光电感应7接受到光信号之后将光信号转换为电信号继而控制电动推杆1的移动,电动推杆1移动带动中间杆10移动,中间杆10带动连接杆11及固定连杆4移动,进而控制夹爪6实现夹取奶杯的功能。
15.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.一种用于挤奶机的机械抓手,其特征在于:包括电动推杆(1)、顶板(2)、侧板(3)、固定连杆(4)、夹爪(6)、导杆接头(9)、中间杆(10)、连接杆(11)、销轴(12)、开口销(13);顶板(2)套接电动推杆(1),所述顶板(2)的两侧均安装一个侧板(3),每个侧板(3)上均安装一组固定连杆(4),所述固定连杆(4)均与对应的夹爪(6)铰接,所述电动推杆(1)上安装导杆接头(9),所述导杆接头(9)连接中间杆(10),所述中间杆(10)的两侧分别铰接一个连接杆(11),所述连接杆(11)与对应的一个固定连杆(4)铰接,所述连接杆(11)与固定连杆(4)之间插有销轴(12),所述销轴(12)上插接开口销(13)。2.根据权利要求1所述的一种用于挤奶机的机械抓手,其特征在于:所述夹爪(6)上均装有一层橡胶垫(8)。3.根据权利要求1所述的一种用于挤奶机的机械抓手,其特征在于:所述夹爪(6)上安装有一个光电感应器(7)。
技术总结
本实用新型涉及一种用于挤奶机的机械抓手,包括电动推杆,顶板套接电动推杆,所述顶板的两侧均安装一个侧板,每个侧板上均安装一组固定连杆,所述固定连杆均与对应的夹爪铰接,所述电动推杆上安装导杆接头,所述导杆接头连接中间杆,所述中间杆的两侧分别铰接一个连接杆,所述连接杆与固定连杆铰接,所述连接杆与固定连杆之间插有销轴,所述销轴上插接开口销。本实用新型的优点:本实用新型所提供的一种用于挤奶机的机械抓手以电动推杆为动力源,并且在电动推杆上加装了一些简单的机械元件,即能完成自动夹取奶杯的工作,且该机械爪手结构简单,造价低廉,适用于小型厂家的使用。适用于小型厂家的使用。适用于小型厂家的使用。
技术研发人员:王磊 李双喜 张永峰 王岳 王乐
受保护的技术使用者:安徽科技学院
技术研发日:2021.03.26
技术公布日:2022/2/11