1.本发明涉及水泥管的装卸领域,具体涉及一种水泥管的柔性装卸方法。
背景技术:
2.水泥管的装卸,大多通过用绳索绑住水泥管,再通过人工肩挑方式或吊装设备起吊方式牵引水泥管移动至预设地点处,然后在解开绳索,绳索解开过程中:1、若绳索是直接绑在水泥管的外圆面,由于绳索部分会被水泥管压在地面,绳索抽出较为不易,而且绳索受到磨损,会降低使用寿命,并且绳索抽出过程中会带动水泥管滚动,水泥管的位置发生改变,需要重新推动水泥管返回至预设地点;2、若绳索是穿过水泥管内部再在水泥外部打结,对水泥管进行绑扎,当需要一节节的将水泥管拼接在一起形成一个整体时,则水泥管被牵引移动至地面上时,水泥管所在的地点与预设地点必须存在一点偏差,即水泥管只能移动至靠近相邻的另一个水泥管,而不能直接与相邻另一个水泥管进行接触,不然绳索解开后,绳索会因被相邻两个水泥管的端部夹住而很难抽出并且花费较大力气抽出绳索后,相邻两个水泥管之间也会存在些微间隙,这就意味着在抽出绳索后,还需要移动水泥管,使水泥管与相邻另一个水泥管接触,较为繁琐,因此,本发明提出了一种水泥管的柔性装卸方法。
技术实现要素:
3.为解决现有水泥管的装卸过程中,存在着绳索解开后,由水泥管上抽出不易并发生较大磨损的问题,以及水泥管在被移动至地面上时,或位于预设地点处但在绳索抽出时会发生移动,或与预设地点存在偏差,需外力移动水泥管至预设地点的问题,本发明提供了一种水泥管的柔性装卸方法。
4.为实现上述技术目的,本发明所采用的技术方案如下。
5.一种水泥管的柔性装卸方法,其包括安装架,安装架上安装有动力装置与抓手装置,安装架通过连接架与吊装设备连接,其步骤在于:
6.s1:动力装置中的动力机构b运行,驱使抓手装置中的连接构件切换为张开状态,处于张开状态中的连接构件牵引处于松开状态的抓手构件中的两个抓手相互远离,当两个抓手之间的距离大于水泥管的外径时,动力机构b停止运行;
7.s2:吊装设备运行牵引本抓手设备移动,使水泥管道位于抓手构件的抓取区内;
8.s3:动力装置中的动力机构b运行,驱使抓手装置中的连接构件切换为合拢状态,当水泥管的外圆面与处于松开状态的抓手构件中的两个抓手接触时,动力机构b停止运行;
9.s4:动力装置中的动力机构a运行驱使抓取构件切换为抓取状态,使抓手呈弯钩形状并对水泥管进行抓取;
10.s5:吊装设备运行牵引本抓手设备与水泥管移动,使水泥管移动至预设地点的正上方且抓手靠近地面;
11.s6:动力装置中的动力机构a运行驱使抓手构件切换为松开状态,使抓手恢复至初始时的柔软松弛状态,该过程中,水泥管在重力作用下竖直下落,同时,连接构件不动对水
泥管进行限制,使水泥管只沿竖直方向下落至预设地点处;
12.s7:吊装设备运行牵引本抓手设备竖直上移;
13.s8:重复上述步骤s1-s7,进行下一轮的水泥管装卸。
14.进一步的,所述抓手装置包括连接机构、驱动机构、抓手机构,连接机构用于抓手机构与安装架之间的连接,驱动机构用于通过驱使连接机构偏转进而驱使抓手机构张开或合拢,抓手机构用于抓取水泥管或松开水泥管;
15.所述连接机构包括连接构件,连接构件沿水平方向设置有两组且该水平方向为方向a;
16.所述连接构件包括两组连接杆组,两组连接杆组分别位于安装架沿方向a的两侧,两组连接杆组之间呈对称布置;
17.所述连接构件设置成在两组连接杆组做相互远离移动的张开状态与两组连接杆组做相互靠近移动的合拢状态之间进行切换。
18.进一步的,所述连接杆组包括底杆与连接杆,底杆分为两段并分别为竖直布置的竖直段与倾斜安装在竖直段顶端的倾斜段,两组连接杆组中的底杆的倾斜段之间的距离沿竖直方向由下至上递增,倾斜段与竖直段之间的连接处为底杆的连接点;
19.所述连接杆倾斜设置在底杆与安装架之间,两组连接杆组中的连接杆之间的距离沿竖直方向由下至上递减,连接杆设置有两个且两个连接杆之间相互平行,两个连接杆分别为连接杆a与连接杆b;
20.所述连接杆a的一端与安装架铰接、另一端与底杆的连接点铰接,连接杆b的一端与安装架铰接、另一端与底杆的倾斜段顶端铰接,连接杆a与安装架铰接点处形成的铰接轴、连接杆a与底杆铰接点处形成的铰接轴、连接杆b与安装架铰接点处形成的铰接轴、连接杆b与底杆铰接点处形成的铰接轴均平行于方向a。
21.进一步的,所述驱动机构设置在连接构件中的两组连接杆组之间,驱动机构包括连接轴、呈水平布置的驱动座、设置在驱动座与连接构件之间的驱动杆组,驱动杆组对应连接构件设置有两组;
22.所述连接轴的轴向平行于方向a,连接轴活动设置在两组连接构件中的连接杆组之间,连接轴对应每组连接构件中的连接杆组设置有两个;
23.所述驱动杆组包括驱动杆,驱动杆设置有两个并分别位于驱动座沿方向a的两侧,两个驱动杆之间的距离沿竖直方向由下至上递增,两个驱动杆分别为驱动杆a与驱动杆b;
24.所述驱动杆a的一端与驱动座铰接、另一端与连接构件中的一个连接杆a铰接,驱动杆b的一端与驱动座铰接、另一端与连接构件中的另一个连接杆a铰接,驱动杆a与驱动座铰接点处形成的铰接轴、驱动杆a与连接杆a铰接点处形成的铰接轴、驱动杆b与驱动座铰接点处形成的铰接轴、驱动杆b与连接杆a铰接点处形成的铰接轴均平行于方向a。
25.进一步的,所述抓手机构包括安装在连接构件上的抓手构件,抓手构件对应连接构件设置有两组;
26.所述抓手构件包括安装在连接杆组上的抓手组件与安装在安装架内的连接座,抓手组件对应每组连接构件中的连接杆组设置有两组,两组抓手组件之间呈对称布置且两组抓手组件之间的区域为抓取区;
27.所述连接座与安装架之间构成竖直方向上的滑动导向配合。
28.进一步的,所述抓手组件包括弹性金属片、抓手、切换件;
29.所述弹性金属片竖直安装在底杆的底端,弹性金属片的末端呈朝向抓取区弯曲的弧形结构;
30.所述抓手由多个安装在弹性金属片上的抓块组成,安装在弹性金属片末端的抓块为底块且底块与弹性金属片之间固定连接,位于底块与底杆底端之间的抓块为中间块且中间块与弹性金属片之间滑动连接,中间块设置有多个;
31.两组抓手组件中的抓块相向的面为抓取面、相背的面为背面,抓取面与背面均为朝向抓取区弯曲的弧面结构,抓块沿弹性金属片延伸方向的侧面开设有穿设孔;
32.初始状态下,相邻两个抓块的背面相互接触、抓取面之间存在有间隙;
33.所述抓手构件设置成在抓取状态与松开状态之间进行切换,抓手构件的初始状态为松开状态,抓手构件处于抓取状态时,抓手呈弯钩形状,抓手构件处于松开状态时,抓手处于松弛状态;
34.所述切换件包括钢索与滑轮组;
35.所述连接杆组中的底杆以及连接杆a中设置有安装槽区,滑轮组包括轴向平行于方向a且安装在安装槽区内的多个滑轮,钢索的一端与连接座连接,钢索的另一端依次绕过多个滑轮、依次穿过多个穿设孔后与底块连接。
36.进一步的,所述动力装置包括安装在安装架上的动力机构a与动力机构b,动力机构a用于驱使连接座竖直上移或下移,动力机构b用于驱使驱动座竖直上移或下移。
37.进一步的,上述步骤s1中,连接构件切换为张开状态:
38.s11:动力机构b运行驱使驱动座沿竖直方向上移,驱动座上移通过驱动杆组驱使每组连接构件中的两个连接杆a做相互远离的偏转,进而使每组连接构件中的两个底杆保持当前竖直状态做相互远离的移动,连接构件切换为张开状态;
39.上述步骤s3中,连接构件切换为合拢状态:
40.s31:动力机构b运行驱使驱动座沿竖直方向下移,驱动座下移通过驱动杆组驱使每组连接构件中的两个连接杆a做相互靠近的偏转,进而使每组连接构件中的两个底杆保持当前竖直状态做相互靠近的移动,连接构件切换为合拢状态。
41.进一步的,上述步骤s4中,抓取构件切换为抓取状态:
42.s41:动力机构a运行驱使连接座上移,连接座上移向上拉动钢索,钢索移动带动底块同步移动,底块移动使弹性金属片朝抓取区方向弯曲变形,并同时使底块与相邻中间块之间紧密贴合、使相邻两个中间块之间紧密贴合,进而使抓手呈弯钩形状,抓手构件切换至抓取状态;
43.上述步骤s6中,抓取构件切换为松开状态:
44.s61:动力机构a运行驱使连接座下移,连接座下移松开钢索,弹性金属片释放弹力,使抓手重新变回初始时的柔软松弛状态,抓手构件切换为松开状态。
45.本发明与现有技术相比,有益效果在于:
46.1、本方案通过抓手装置中的抓手柔性抓取水泥管,并在将水泥管放置在预设地点后,抓手装置中的抓手变回初始状态时的柔软松弛,该过程中,水泥管在重力作用下竖直下落至预设地点处,接着,由于抓手柔软,故而可平稳顺利的脱离水泥管并被抽出,且水泥管不会发生偏移,仍在预设地点处,后续无需再对水泥管进行位置定位校准移动;
47.2、用于驱使抓手装置的抓取区开口张开或合拢的动力机构b,用于驱使抓手绷紧呈弯钩形状或松开呈柔软松弛状态的动力机构a,两者均设置有备用的手柄,在电机出现问题故障时,作为应急手段。
附图说明
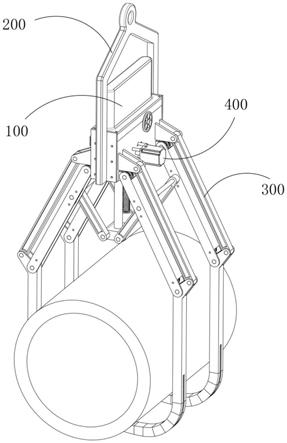
48.图1为本发明在抓手呈弯钩形状时的结构示意图;
49.图2为本发明在抓手松弛时的结构示意图;
50.图3为本发明的抓手装置的结构示意图;
51.图4为本发明的驱动机构的结构示意图;
52.图5为本发明的连接构件的结构示意图;
53.图6为本发明的连接杆组的剖视图;
54.图7为本发明的切换件的结构示意图;
55.图8为本发明的抓手在松弛时的结构示意图;
56.图9为本发明的抓手在呈弯钩形状时的结构示意图;
57.图10为本发明的动力装置的结构示意图;
58.图11为本发明的动力装置的结构示意图;
59.图12为本发明的动力机构a的结构示意图;
60.图13为本发明的动力机构b的结构示意图。
61.附图中的标号为:
62.100、安装架;200、连接架;
63.300、抓手装置;
64.310、连接机构;311、底杆;312、连接杆a;313、连接杆b;
65.320、驱动机构;321、驱动座;322、连接轴;323、驱动杆a;324、驱动杆b;
66.330、抓手机构;331、钢索;332、滑轮组;333、弹性金属片;334、底块;335、中间块;
67.340、连接座;
68.400、动力装置;
69.410、动力机构a;411、电机a;412、动力传递件a;413、传递轴a;414、动力传递件b;415、传递轴b;416、蜗轮蜗杆组a;417、螺纹杆a;418、手柄a;
70.420、动力机构b;421、电机b;422、蜗轮蜗杆组b;423、螺纹杆b;424、导杆;425、手柄b。
具体实施方式
71.为更进一步阐述本发明为实现预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明的具体实施方式、结构、特征及其功效,详细说明如后。
72.一种水泥管的柔性装卸方法,其步骤在于:
73.s1:动力装置400中的动力机构b420运行,驱使抓手装置300中的连接构件切换为张开状态,处于张开状态中的连接构件牵引处于松开状态的抓手构件中的两个抓手相互远离,当两个抓手之间的距离大于水泥管的外径时,动力机构b420停止运行;
74.s2:吊装设备运行牵引本抓手设备移动,使水泥管道位于抓手构件的抓取区内;
75.s3:动力装置400中的动力机构b420运行,驱使抓手装置300中的连接构件切换为合拢状态,当水泥管的外圆面与处于松开状态的抓手构件中的两个抓手接触时,动力机构b420停止运行;
76.s4:动力装置400中的动力机构a410运行驱使抓取构件切换为抓取状态,使抓手呈弯钩形状并对水泥管进行抓取;
77.s5:吊装设备运行牵引本抓手设备与水泥管移动,使水泥管移动至预设地点的正上方且抓手靠近地面;
78.s6:动力装置400中的动力机构a410运行驱使抓手构件切换为松开状态,使抓手恢复至初始时的柔软松弛状态,该过程中,水泥管在重力作用下竖直下落,同时,连接构件不动对水泥管进行限制,使水泥管只沿竖直方向下落至预设地点处;
79.s7:吊装设备运行牵引本抓手设备竖直上移;
80.s8:重复上述步骤s1-s7,进行下一轮的水泥管装卸。
81.如图1-2所示,一种水泥管装卸用柔性抓手设备,包括安装架100以及安装在安装架100上的抓手装置300与动力装置400,其中,安装架100通过连接架200与起吊机、挖掘机等吊装设备的机械臂连接,抓手装置300用于柔性抓取水泥管或将水泥管定位放置在预设地点处,动力装置400用于为抓手装置300的抓取动作提供动力,通过抓手装置300柔性抓取水泥管,水泥管的表面不会受到磨损,通过抓手装置300将水泥管放置在预设地点后,抓手装置300松开水泥管并移走,移走过程中,水泥管稳定放置在预设地点处,不会发生偏移,后续无需再进行位置定位校准移动。
82.如图3所示,抓手装置300包括连接机构310、驱动机构320、抓手机构330,抓手机构330与安装架100之间通过连接机构310进行连接,驱动机构320通过驱使连接机构310偏转,进而驱使抓手机构330张开或合拢,抓手机构330抓取水泥管或松开水泥管。
83.如图3、5所示,连接机构310包括连接构件,连接构件沿水平方向设置有两组且该水平方向为方向a。
84.连接构件包括两组连接杆组,两组连接杆组分别位于安装架100沿方向a的两侧,两组连接杆组之间呈对称布置。
85.连接杆组包括底杆311与连接杆,底杆311由两段组成:呈竖直布置的竖直段,倾斜安装在竖直段顶端的倾斜段,两组连接杆组中的底杆311的倾斜段之间的距离沿竖直方向由下至上递增,倾斜段与竖直段之间的连接处为底杆311的连接点。
86.连接杆倾斜设置在底杆311与安装架100之间,两组连接杆组中的连接杆之间的距离沿竖直方向由下至上递减,连接杆设置有两个:相互平行的连接杆a312与连接杆b313。
87.连接杆a312的一端与安装架100铰接、另一端与底杆311的连接点铰接,连接杆b313的一端与安装架100铰接、另一端与底杆311的倾斜段顶端铰接,这四个铰接点处形成的铰接轴均平行于方向a。
88.连接构件设置成在张开状态与合拢状态之间进行切换,初始状态为合拢状态。
89.当外力驱使连接杆a312偏转时,在两个连接杆的配合下,每组连接构件中的两组连接杆组中的底杆311保持当前竖直状态做相互远离或相互靠近的移动,移动轨迹呈圆弧线,前者移动使连接构件切换为张开状态,进而使抓手机构330的抓取区张开,后者移动使连接构件切换为合拢状态,进而使抓手机构330的抓取区做合拢动作。
90.如图3-4所示,驱动机构320设置在连接构件中的两组连接杆组之间,驱动机构320包括连接轴322、呈水平布置的驱动座321、设置在驱动座321与连接构件之间的驱动杆组,驱动杆组对应连接构件设置有两组。
91.连接轴322的轴向平行于方向a,连接轴322活动设置在两组连接构件中的连接杆组之间,连接轴322对应每组连接构件中的连接杆组设置有两个。
92.驱动杆组包括驱动杆,驱动杆设置有两个并分别位于驱动座321沿方向a的两侧:驱动杆a323与驱动杆b324,两个驱动杆之间的距离沿竖直方向由下至上递增。
93.驱动杆a323的一端与驱动座321铰接、另一端与连接构件中的一个连接杆a312铰接,驱动杆b324的一端与驱动座321铰接、另一端与连接构件中的另一个连接杆a312铰接,这四个铰接点处形成的铰接轴均平行于方向a。
94.动力装置400驱使驱动座321沿竖直方向上移或下移,驱动座321上移通过驱动杆组驱使每组连接构件中的两个连接杆a312做相互远离的偏转,进而使每组连接构件中的两个底杆311保持当前竖直状态做相互远离的移动,反之,驱动座321下移使每组连接构件中的两个底杆311保持当前竖直状态做相互靠近的移动,进而使连接构件发生状态改变。
95.如图3、5-9所示,抓手机构330包括安装在连接构件上的抓手构件,抓手构件对应连接构件设置有两组。
96.抓手构件包括安装在连接杆组上的抓手组件与安装在安装架100内的连接座340,抓手组件对应每组连接构件中的连接杆组设置有两组,两组抓手组件之间呈对称布置且两组抓手组件之间的区域为抓取区。
97.连接座340与安装架100之间构成竖直方向上的滑动导向配合。
98.抓手组件包括弹性金属片333、抓手、切换件。
99.如图6、8-9所示,弹性金属片333竖直安装在底杆311的底端,弹性金属片333的末端呈朝向抓取区弯曲的弧形结构。
100.抓手由多个安装在弹性金属片333上的抓块组成,其中,安装在弹性金属片333末端的抓块为底块334且底块334与弹性金属片333之间固定连接,位于底块334与底杆311底端之间的抓块为中间块335且中间块335与弹性金属片333之间滑动连接,中间块335设置有多个。
101.两组抓手组件中的抓块相向的面为抓取面、相背的面为背面,抓取面与背面均为朝向抓取区弯曲的弧面结构,抓块沿弹性金属片333延伸方向的侧面还开设有穿设孔。
102.初始状态下,相邻两个抓块的背面相互接触、抓取面之间存在有间隙。
103.如图6-7所示,切换件包括钢索331与滑轮组332。
104.连接杆组中的底杆311以及连接杆a312中设置有安装槽区,滑轮组332包括轴向平行于方向a且安装在安装槽区内的滑轮,钢索331的一端与连接座340连接,钢索331的另一端绕过多个滑轮、穿过多个穿设孔后与底块334连接。
105.抓手构件设置成在抓取状态与松开状态之间进行切换,初始状态为松开状态。
106.动力装置400驱使连接座340上移,连接座340上移向上拉动钢索331,钢索331移动带动底块334同步移动,底块334移动使弹性金属片333朝抓取区方向弯曲变形,并同时还使底块334与相邻中间块335之间紧密贴合、使相邻两个中间块335之间紧密贴合,使抓手呈弯钩形状,此时,抓手构件切换至抓取状态;
107.动力装置400驱使连接座340下移,连接座340下移松开钢索331,弹性金属片333释放弹力,使抓手重新变回初始状态时的柔软松弛,此时,抓手构件切换为松开状态。
108.如图10-11所示,动力装置400包括安装在安装架100上的两组动力机构:动力机构a410与动力机构b420,其中,动力机构a410运行驱使连接座340竖直上移或下移,进而使抓手构件的状态进行切换,动力机构b420运行驱使驱动座321竖直上移或下移,进而使连接构件的状态进行切换。
109.如图12所示,动力机构a410包括安装在安装架100上的电机a411与传递轴以及螺纹杆a417,传递轴绕自身轴向转动,传递轴设置有两个:轴向水平并垂直于方向a的传递轴a413、轴向平行于方向a的传递轴b415。
110.电机a411的输出端与传递轴a413之间设置有用于实现两者之间动力连接的动力传递件a412,传递轴a413与传递轴b415之间设置有用于实现两者之间动力连接的动力传递件b414,优选的,动力传递件a412为现有带传动结构可实现,动力传递件b414为现有斜齿轮结构可实现。
111.螺纹杆a417呈竖直布置,螺纹杆a417的底端与连接座340连接,螺纹杆a417与安装架100之间通过导向件构成竖直方向上的滑动导向配合,具体的,导向件包括设置在螺纹杆a417上的导向槽与设置在安装架100上的导向凸起,导向槽的引导方向竖直且导向凸起滑动位于导向槽内;通过导向件使螺纹杆a417只能沿竖直方向发生移动而不能绕自身轴向转动。
112.螺纹杆a417对应抓手构件中的连接座340设置有两个。
113.传递轴b414与螺纹杆a417之间通过蜗轮蜗杆组a416进行连接,具体的,蜗轮蜗杆组a416包括安装在传递轴a414上的主动件a与螺纹安装在螺纹杆a417上的从动件a。
114.蜗轮蜗杆组a416对应螺纹杆a417设置有两个。
115.电机a411运行依次通过动力传递件a412、传递轴a413、动力传递件b414、传递轴b415、蜗轮蜗杆组a416的主动件a驱使蜗轮蜗杆组a416的从动件a旋转,由于螺纹杆a417只能沿竖直方向发生移动而不能绕自身轴向转动,并且蜗轮蜗杆组a416的从动件a与螺纹杆a417螺纹连接,故而当蜗轮蜗杆组a416的从动件a旋转时,会驱使螺纹杆a417沿竖直方向上移或下移,进而带动连接座340同步上移或下移,使抓手构件的状态发生改变,除此之外,蜗轮蜗杆组a416自带自锁性质,当传递轴b415不转时,螺纹杆a417随即停止移动。
116.优选的,当电机a411出现故障无法运行时,则抓手构件的状态就不能发生改变,为此,传递轴a413的末端伸出安装架100并安装有手柄a418,在电机a411出现故障问题时,可以通过手柄a418手动旋转传递轴a413,作为应急手段。
117.如图11、13所示,动力机构b420包括安装在安装架100上的电机b421与螺纹杆b423、与电机b421输出端动力连接的传递轴c,传递轴c的轴向水平并垂直于方向a,传递轴c绕自身轴向转动。
118.螺纹杆b423呈竖直布置,螺纹杆b423的底端伸出安装架100并与驱动座321连接,螺纹杆b423与安装架100之间通过滑动件构成竖直方向上的滑动导向配合,具体的,滑动件包括设置在安装架100上的滑槽与设置在螺纹杆b423上的滑动凸起,滑槽的引导方向竖直且滑动凸起滑动位于滑槽内;通过滑动件使螺纹杆b423只能沿竖直方向发生移动而不能绕自身轴向转动。
119.传递轴c与螺纹杆b423之间通过蜗轮蜗杆组b422进行连接,具体的,蜗轮蜗杆组b422包括安装在传递轴c上的主动件b与螺纹安装在螺纹杆b423上的从动件b。
120.电机b421运行依次通过传递轴c、蜗轮蜗杆组b422的主动件驱使蜗轮蜗杆组b422的从动件转动,由于螺纹杆b423只能沿竖直方向发生移动而不能绕自身轴向转动,并且蜗轮蜗杆组b422的从动件与螺纹杆b423螺纹连接,故而当蜗轮蜗杆组b422的从动件转动时,会驱使螺纹杆b423沿竖直方向上移或下移,进而带动驱动座321同步上移或下移,进而使连接构件发生状态改变,除此之外,蜗轮蜗杆组b422自带自锁性质,当传递轴c不转时,螺纹杆b423随即停止移动。
121.优选的,为了使驱动座321的竖直移动过程更加平稳顺利,驱动座321上竖直设置有导杆424,导杆424与安装架100之间构成竖直方向上的滑动导向配合。
122.优选的,当电机b421出现故障无法运行时,则连接构件的状态就不能发生改变,为此,传递轴c的末端伸出安装架100并安装有手柄b425,在电机b421出现故障问题时,可以通过手柄b425手动旋转传递轴c,作为应急手段。
123.本发明的工作原理为:
124.首先,动力机构b420运行驱使连接构件切换为张开状态,处于张开状态中的连接构件牵引处于松开状态的抓手构件中的两个抓手相互远离,当两个抓手之间的距离略大于水泥管的外径时,动力机构b420停止运行;
125.接着,吊装设备运行牵引本抓手设备移动,使水泥管道位于抓手构件的抓取区内;
126.接着,动力装置400中的动力机构b420运行,驱使抓手装置300中的连接构件切换为合拢状态,当水泥管的外圆面与处于松开状态的抓手构件中的两个抓手接触时,动力机构b420停止运行;
127.接着,动力机构a410运行驱使抓取构件切换为抓取状态,对水泥管进行抓取;
128.接着,吊装设备运行牵引本抓手设备与水泥管整体移动,使水泥管移动至预设地点的正上方且抓手靠近地面;
129.接着,动力机构a410运行驱使抓手构件切换为松开状态,抓手变回初始状态中的柔软松弛,该过程中,水泥管在重力作用下竖直下落至预设地点处,由于此时连接构件不动,即水泥管被底杆311限制左右移动,故而水泥管准确下落在预设地点处;
130.接着,吊装设备运行牵引本抓手设备竖直上移,由于抓手柔软,故而可平稳顺利的脱离水泥管并被抽出,且水泥管不会发生偏移,仍在预设地点处。
131.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明,任何本领域技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简介修改、等同变化与修饰,均仍属于本发明技术方案的范围内。