1.本发明涉及割草机领域,具体涉及园林工程割草机。
背景技术:
2.市政府在城市规划中为了使城市环境更加美好,都需要在很多地方进行园林工程,园林工程在建设过程中往往需要铺设大量的草坪,但是随着时间的流逝,一些草坪生长过快,导致高低不平,从而影响了市容,此时就需要工人对草坪进行修理,但是常规的修理是工人拿着割草机对草坪进行修理,而被割断的草就留在了草坪上,被割断的草慢慢枯萎就会覆盖草坪的颜色,同样影响市容,再次处理枯萎的草就比较麻烦,费时费力。
技术实现要素:
3.为解决现有技术存在的不足,本发明提供了一种用于市政园林工程便携式割草机。
4.本发明的技术方案为:一种用于市政园林工程便携式割草机,包括外壳,外壳上设置行走机构,外壳底面开口,外壳内部设置竖直的第一转轴,外壳顶面设置电机,第一转轴通过电机驱动,第一转轴底端侧面设置数个第一切割叶片,其特征在于:外壳内转动连接圆板,圆板与第一转轴固定连接,外壳上设置收纳装置,圆板上沿周向方向均布多个收集装置,收集装置能够将被割断的草向上运送至收纳装置中,第一转轴通过传动机构带动收集装置运转。
5.进一步,所述的收集装置包括第二转轴,第一转轴通过传动机构带动第二转轴转动,第二转轴穿过圆板,第二转轴与圆板转动连接,第二转轴上固定套装水平的支撑板,支撑板上矩阵分布四根竖直的第三转轴,第三转轴上均设置绞龙,绞龙传送方向向上传送,第二转轴下端侧面设置数个第二切割叶片,第二转轴通过齿轮传动带动第三转轴转动。
6.进一步,所述的齿轮传动包括主动齿轮,第二转轴上套装主动齿轮,第三转轴对应主动齿轮的位置处均套装从动齿轮,从动齿轮均与主动齿轮相互啮合。
7.进一步,所述的收纳装置包括环形收纳箱,环形收纳箱套装在外壳侧面,环形收纳箱底面开口,且开口处设置可拆卸盖板,外壳侧面沿周向方向对应绞龙上端位置处开设数个长条形通孔,环形收纳箱内部与长条形通孔相通。
8.进一步,所述的行走机构包括滚轮,环形收纳箱侧面沿周向方向设置四个滚轮,滚轮通过水平的第四转轴与环形收纳箱转动连接。
9.进一步,所述的环形收纳箱侧面开设均布的数个通气孔。
10.进一步,所述的外壳上方一侧设置把手,把手通过支架与外壳连接。
11.进一步,所述的传动机构包括皮带轮,第一转轴与第二转轴上均套装皮带轮,皮带轮之间通过皮带连接。
12.本发明提供了一种用于市政园林工程便携式割草机的有益效果为:本装置在对草坪进行修理后,能够通过收集装置将割下的草自动向上运输至收纳装置中收集起来集中处
理,从而防止被割下的草在草坪上枯萎而影响了市容,本装置在对草坪进行修理后只剩下整齐的草坪,从而省时省力。
附图说明
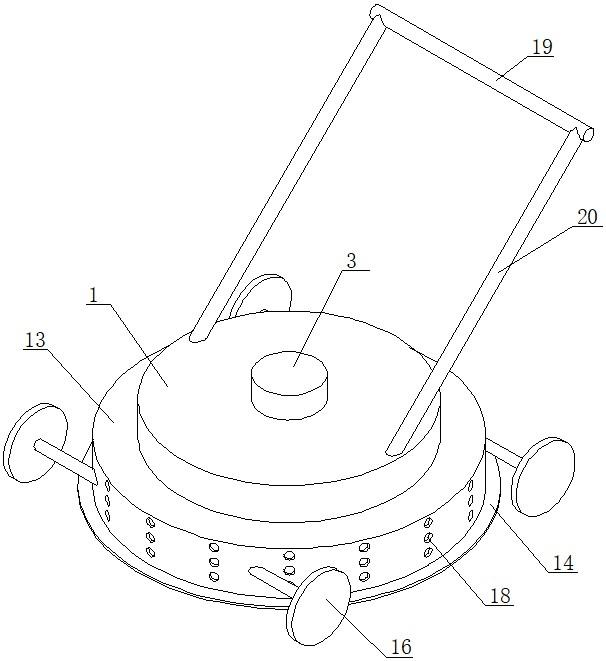
13.图1是本装置的第一立体图;图2是本装置的第二立体图;图3是外壳内部结构的立体图;图4是传动机构的结构立体图;图5是收集装置的机构立体图;图6是外壳内部连接关系结构的立体图。
具体实施方式
14.为便于本领域的技术人员理解本发明,下面结合附图说明本发明的具体实施方式。
15.在本申请的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
16.在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本申请中的具体含义。
17.本发明一种用于市政园林工程便携式割草机,包括外壳1,外壳1底面开设方便割草的开口,外壳1内部设置第一转轴2,第一转后2通过电机3驱动,第一转轴2底端设置用于割草的第一切割叶片3,外壳1内设置用于带动收集装置绕第一转轴2公转的圆板5,收集装置绕第一转轴2转动从而能够更好的将割断的草收集起来,圆板5与外壳1转动连接,圆板5与第一转轴2固定连接。
18.如图4所述,圆板5上沿周向方向设置多个第二转轴6,第二转轴6穿过圆板5,第二转轴6与第一转轴2上均套装皮带轮21,皮带轮轮21之间通过皮带22连接,第一转轴2转动的时候通过皮带轮21和皮带22即可带动第二转轴6转动,所以当第一转轴2转动的时候,通过圆板5能够带动第二转轴6绕第一转轴2公转,通过皮带22和皮带轮21能够带动第二转轴6自转,从而使收集装置在收集草的时候效率更高。
19.如图3所示,第二转轴6上套装水平的支撑板7,支撑板7上设置竖直的四根第三转轴8,第三转轴8上设置绞龙9,第三转轴9通过齿轮传动与第二转轴6连接,当第二转轴6转动的时候带动第三转轴8转动,所以第一转轴2转动的时候,此时第三转轴8在绕第一转轴2公转的同时也在绕第二转轴6公转,且自身也在自转,所以此时绞龙能够将割断的草缠住,由于绞龙在转动的时候能够将缠住的草向上运输,从而将割下的草收集起来,保证了本装置
缠绕草时效率更高,第二转轴6下端侧面设置多个第二切割叶片10,当缠绕的草向上移动到第二切割叶片10的位置时,此时第二切割叶片10将草割断,此时草无法缠绕在第三转轴8上。
20.外壳1外侧套装环形收纳箱13,环形收纳箱13下端开口,且开口处设置可拆卸的盖板14,环形收纳箱13侧面开设用于排气的通孔18,外壳1侧面沿周向方向对应绞龙9上端的位置处开设多个长条形通孔15,长条形通孔15与环形收纳箱13相通,此时无法缠绕在第三转轴8上的草在离心力的作用下通过长条形通孔15被甩入环形收纳箱13中,从而将草收集起来,通过可拆卸的盖板14,即可将割下的草收集起来统一处理。
21.环形收纳箱13上设置方便移动的滚轮16,通过支架19在外壳1上安装把手20,即可方便的推动本装置进行移动,从而方便对草坪进行修理。
22.以上所述的本发明实施方式,并不构成对本发明保护范围的限定。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包含在本发明的权利要求保护范围之内。
技术特征:
1.一种用于市政园林工程便携式割草机,包括外壳(1),外壳(1)上设置行走机构,外壳(1)底面开口,外壳(1)内部设置竖直的第一转轴(2),外壳(1)顶面设置电机(3),第一转轴(2)通过电机(3)驱动,第一转轴(2)底端侧面设置数个第一切割叶片(4),其特征在于:外壳(1)内转动连接圆板(5),圆板(5)与第一转轴(2)固定连接,外壳(1)上设置收纳装置,圆板(5)上沿周向方向均布多个收集装置,收集装置能够将被割断的草向上运送至收纳装置中,第一转轴(2)通过传动机构带动收集装置运转。2.根据权利要求1所述的一种用于市政园林工程便携式割草机,其特征在于:所述的收集装置包括第二转轴(6),第一转轴(2)通过传动机构带动第二转轴(6)转动,第二转轴(6)穿过圆板(5),第二转轴(6)与圆板(5)转动连接,第二转轴(6)上固定套装水平的支撑板(7),支撑板(7)上矩阵分布四根竖直的第三转轴(8),第三转轴(8)上均设置绞龙(9),绞龙(9)传送方向向上传送,第二转轴(6)下端侧面设置数个第二切割叶片(10),第二转轴(6)通过齿轮传动带动第三转轴(8)转动。3.根据权利要求2所述的一种用于市政园林工程便携式割草机,其特征在于:所述的齿轮传动包括主动齿轮(11),第二转轴(6)上套装主动齿轮(11),第三转轴(8)对应主动齿轮(11)的位置处均套装从动齿轮(12),从动齿轮(12)均与主动齿轮(11)相互啮合。4.根据权利要求2所述的一种用于市政园林工程便携式割草机,其特征在于:所述的收纳装置包括环形收纳箱(13),环形收纳箱(13)套装在外壳(1)侧面,环形收纳箱(13)底面开口,且开口处设置可拆卸盖板(14),外壳(1)侧面沿周向方向对应绞龙(9)上端位置处开设数个长条形通孔(15),环形收纳箱(13)内部与长条形通孔(15)相通。5.根据权利要求4所述的一种用于市政园林工程便携式割草机,其特征在于:所述的行走机构包括滚轮(16),环形收纳箱(13)侧面沿周向方向设置四个滚轮(16),滚轮(16)通过水平的第四转轴(17)与环形收纳箱(13)转动连接。6.根据权利要求4所述的一种用于市政园林工程便携式割草机,其特征在于:所述的环形收纳箱(13)侧面开设均布的数个通气孔(18)。7.根据权利要求1所述的一种用于市政园林工程便携式割草机,其特征在于:所述的外壳(1)上方一侧设置把手(19),把手(19)通过支架(20)与外壳(1)连接。8.根据权利要求2所述的一种用于市政园林工程便携式割草机,其特征在于:所述的传动机构包括皮带轮(21),第一转轴(2)与第二转轴(6)上均套装皮带轮(21),皮带轮(21)之间通过皮带(22)连接。
技术总结
一种用于市政园林工程便携式割草机,包括外壳,外壳上设置行走机构,外壳底面开口,外壳内部设置竖直的第一转轴,外壳顶面设置电机,第一转轴通过电机驱动,第一转轴底端侧面设置数个第一切割叶片,其特征在于:外壳内转动连接圆板,圆板与第一转轴固定连接,外壳上设置收纳装置,圆板上沿周向方向均布多个收集装置,收集装置能够将被割断的草向上运送至收纳装置中,第一转轴通过传动机构带动收集装置运转。转。转。
技术研发人员:夏冰 胡继光 金映雪
受保护的技术使用者:河南职业技术学院
技术研发日:2021.11.03
技术公布日:2022/2/11