1.本技术涉及数据处理技术领域,尤其涉及一种基于风电场的多信源综合处理护鸟装置和方法。
背景技术:
2.风电机组是风电场的重要组成部分,风电机组的安全运行,直接影响着供电企业的经济效益。风电场大多运行在人稀的野外,会受到自然灾害、人为的损坏和动物危害等许多难以预见的破坏,其中由于鸟类引起的机组故障占有相当大的比例。
3.随着人类对自然生态环境保护意识的加强,在鸟类经过风电场区时,为了避免鸟类不被风电机组叶片打伤,目前多采用护鸟装置对鸟类进行驱赶。
4.目前常见的护鸟装置,在探鸟设备识别到鸟类活动信息后,便通知驱鸟设备驱鸟,这种护鸟装置驱鸟效果差。
技术实现要素:
5.本技术提出一种基于风电场的多信源综合处理护鸟装置和方法。
6.本技术一方面实施例提出了一种基于风电场的多信源综合处理护鸟装置,包括:多信源探测单元、数据预处理单元、数据综合处理单元、控制单元、驱鸟单元;其中,
7.所述多信源探测单元,用于对鸟类目标进行数据采集;其中,所述多信源探测单元包括多个探测传感器;
8.所述数据预处理单元,与所述多信源探测单元连接,用于对所述多个探测传感器采集的数据进行预处理,获取第一数据;
9.所述数据综合处理单元,与所述数据预处理单元连接,用于对所述第一数据进行综合处理,获取第二数据;
10.所述控制单元,分别与所述数据综合处理单元、所述驱鸟单元连接,用于根据所述第二数据,向所述驱鸟单元发送驱鸟指令;
11.所述驱鸟单元,用于根据所述驱鸟指令对所述鸟类目标进行驱赶。
12.在本技术一方面实施例一种可能的实现方式中,该装置还可包括:自组织神经网络单元;其中,
13.所述自组织神经网络单元,与所述数据综合处理单元连接,用于确定相关区域中所述第二数据对应的相关度最高的数据综合处理单元,并将所述第二数据发送至所述相关度最高的数据综合处理单元,以及接收相关区域中其他护鸟装置的数据综合处理单元发送的第三数据;
14.所述数据综合处理单元还用于对所述第二数据和所述第三数据进行综合处理,得到第四数据;
15.所述控制单元,还用于根据所述第四数据,向所述驱鸟单元发送驱鸟指令。
16.在本技术一方面实施例一种可能的实现方式中,该装置还可包括:护鸟单元,其
中,所述护鸟单元,与所述控制单元连接;
17.所述控制单元,还用于在所述驱鸟单元驱鸟失败的情况下,向所述护鸟单元发送停机指令;
18.所述护鸟单元,用于接收所述停机指令,并根据所述驱鸟指令向目标风电设备下发停机指令。
19.在本技术一方面实施例一种可能的实现方式中,所述对所述第一数据进行综合处理,包括:
20.对所述第一数据进行标定、关联、融合与识别处理,获取所述第二数据。
21.在本技术一方面实施例一种可能的实现方式中,所述多个探测传感器为雷达、激光、闭路电视cctv、红外热成像仪中的多种。
22.本技术另一方面实施例提出了一种基于风电场的多信源综合处理护鸟方法,该方法应用于基于风电场的多信源综合处理护鸟装置,所述装置包括:多信源探测单元、数据预处理单元、数据综合处理单元、控制单元、驱鸟单元;所述方法包括:
23.所述多信源探测单元对鸟类目标进行数据采集;
24.所述数据预处理单元对所述多个探测传感器采集的数据进行预处理,获取第一数据;
25.所述数据综合处理单元对所述第一数据进行综合处理,获取第二数据;
26.所述控制单元根据所述第二数据,向所述驱鸟单元发送驱鸟指令;
27.所述驱鸟单元根据所述驱鸟指令对所述鸟类目标进行驱赶。
28.在本技术另一方面实施例一种可能的实现方式中,所述装置还包括自组织神经网络单元,所述方法还包括:
29.自组织神经网络单元确定相关区域中所述第二数据对应的相关度最高的数据综合处理单元,并将所述第二数据发送至所述相关度最高的数据综合处理单元,以及接收相关区域中其他护鸟装置的数据综合处理单元发送的第三数据;
30.所述数据综合处理单元对所述第二数据和所述第三数据进行综合处理,得到第四数据;
31.所述控制单元根据所述第四数据,向所述驱鸟单元发送驱鸟指令。
32.在本技术另一方面实施例一种可能的实现方式中,所述装置还包括:护鸟单元;所述方法还包括:
33.所述控制单元在所述驱鸟单元驱鸟失败的情况下,向所述护鸟单元发送停机指令;
34.所述护鸟单元接收所述停机指令,并根据所述驱鸟指令向目标风电设备下发停机指令。
35.在本技术另一方面实施例一种可能的实现方式中,所述对所述第一数据进行综合处理,包括:
36.对所述第一数据进行标定、关联、融合与识别处理,获取所述第二数据。
37.在本技术另一方面实施例一种可能的实现方式中,所述多个探测传感器为雷达、激光、闭路电视cctv、红外热成像仪中的多种。
38.本技术实施例的基于风电场的多信源综合处理护鸟装置和方法,通过对多信源数
据进行预处理,降低了信号干扰和数据处理的工作量,对预处理后的数据进行综合处理,实现了对风电场的鸟类进行精准识别与跟踪,提高了驱鸟效果,提高了驱鸟效果。
39.本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
40.本技术上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
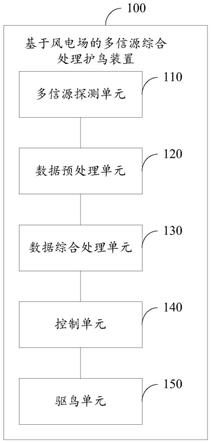
41.图1为本技术实施例所提供的一种基于风电场的多信源综合处理护鸟装置的结构示意图;
42.图2为自组织神经网络的结构示意图;
43.图3为本技术提供的一种具体的基于风电场的多信源综合处理护鸟装置的结构示意图;
44.图4为本技术实施例提供的数据处理单元组成框图;
45.图5为本实施例提供的一种风电场自组织神经网络示意图;
46.图6为本技术实施例提供的一种基于风电场的多信源综合处理护鸟装置的示意图;
47.图7为本技术实施例提供的一种基于风电场的多信源综合处理护鸟方法的流程示意图。
具体实施方式
48.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。
49.下面参考附图描述本技术实施例的基于风电场的多信源综合处理护鸟装置和方法。
50.图1为本技术实施例所提供的一种基于风电场的多信源综合处理护鸟装置的结构示意图。
51.如图1所示,该装置100包括:多信源探测单元110、数据预处理单元120、数据综合处理单元130、控制单元140、驱鸟单元150。
52.其中,多信源探测单元110包括多个探测传感器,用于对鸟类目标进行数据采集。具体地,可采集鸟类目标的坐标信息、飞行速度、飞行高度等数据。
53.多信源探测单元110与数据预处理单元120连接,数据预处理单元120可对每个探测传感器采集的数据进行预处理,获取第一数据。具体地,可对采集的数据进行模数转换、滤波等处理。
54.数据预处理单元120,将每个探测传感器采集的数据中的杂波和不需要的信息剔除,得到测量的动态鸟类目标信息,从而减少数据存储量。数据预处理单元120还可建立机动目标运动一致度模型,以判定测量数据的一致程度,剔除野点。本实施例中,经过数据预处理,可以确保参与目标状态估计的都是优质的测量数据,不仅提高目标跟踪精度,且减少
了参与数据融合的测量数据量以及通信开销。
55.其中,杂波主要来自探测传感器采集过程中存在的随机的虚警、虚假目标产生的杂波、干扰目标等。数据预处理是在对采集的数据进行综合处理之前,先进行筛选,将不在门限之内的数据剔除,并将经过所有判决门限的数据保留。数据预处理的好处在于使得后续数据处理过程中数据的规模明显减小,计算量大幅下降,在一定程度上能够减轻计算机的负担,提高数据处理的速度和目标跟踪的精度,同时使虚假航迹形成的可能性降低。
56.数据综合处理单元130与数据预处理单元120连接,数据预处理单元120可将预处理得到的第一数据发送给数据综合处理单元130。数据综合处理单元130可对第一数据进行综合处理,获取第二数据。
57.本实施例中,对第一数据进行综合处理包括对第一数据进行标定、关联、融合与识别等处理,具体过程如下:
58.1)数据标定:
59.多传感器融合属于特征级目标状态数据融合,对多传感器分别对应的第一数据进行校准与相关处理。数据校准的作用是统一各个传感器的时间和空间参考点,这是数据融合的前提条件。数据相关的作用是判别不同时间空间的数据是否来自同一鸟类目标,并对属于同一鸟类目标的数据进行归并。
60.由于各个传感器是独立不同步工作,并且安装位置也不同,因此会导致所获得的传感器数据在时间和空间上存在差异,所以数据融合前需要进行传感器数据标定,将所需的数据统一到同一个时间和空间上。
61.统一的时间参考基准一般采用协调世界时(universal time coordinated,简称utc),时间对准的方法主要有线性时间对准插值法、抛物时间对准插值法、拉格朗日时间对准插值法、牛顿时间对准插值法等。
62.统一的大地坐标系可采用wgs-84(world geodetic system一1984 coordinate system),wgs-84是一种国际上采用的地心坐标系,并采用外推法、插值法等将目标位置等动态数据对准。
63.2)数据关联:
64.数据关联过程是确定传感器采集到的量测信息和目标源之间的对应关系的过程。数据关联处理利用数据的相似特征,来判断这些特征不完全相同的数据是否来源于同一目标。对时空统一的数据根据传感器类型进行加权处理,将通过加权处理后得到的量测信息作为有效目标信息,进行目标状态的更新,从而完成目标点迹与航迹的正确关联。并对目标状态估计进行修正,从而提高数据关联的精度。
65.多组关联数据可采用模糊关联的方法实现数据相关判断。经过数据校准后的鸟类目标数据作为等待进行关联判别的一组输入向量,通过关联方程计算两组向量中对应向的关联等级。输入为两个目标跟踪向量的数据,通过对应各项数据的关联度计算与设定相关门限比较,当各项数据的关联度均满足相关门限的要求时,就可以判别出这两个跟踪数据相关,进而就可以得出两个跟踪信息对应于同一鸟类目标。
66.比如,一个跟踪数据包括飞行速度和飞行高度,另一个跟踪数据也包括飞行速度和飞行高度,分别比较两个跟踪数据中飞行速度之间的关联度和飞行高度之间的关联度,并判断飞行速度之间的关联度是否满足飞行速度门限,以及飞行高度之间的关联度是否满
足飞行高度门限。
67.3)数据融合与识别:
68.数据融合是利用多传感器信息进行多级别、多方面、多层次信息检测、相关、估计和综合以获得目标的状态和特征估计以及态势和威胁评估的一种多级别自动信息处理过程,它将不同来源、不同模式、不同时间、不同地点、不同表现形式的信息进行融合,最后得出被感知对象的更精确的描述。其中,按照不同的融合级别、层次,数据融合可以分为航迹级融合、点迹级融合、信号级融合。
69.利用卡尔曼滤波方法对关联的数据进行融合处理,对融合后的数据进行识别,得到鸟类目标的种类、速度、高度、方位以及行为、动向估计等信息,本实施例中,称为第二数据。
70.控制单元140,分别与数据综合处理单元130、驱鸟单元150连接,控制单元140用于根据综合处理得到的第二数据,向驱鸟单元150发送驱鸟指令。
71.具体地,控制单元140根据数据综合处理结果,将多个探测器位置信息与预设的驱鸟单元150之间的位置信息相关联,向相关的驱鸟单元150下发驱鸟指令。驱鸟单元150根据驱鸟指令对鸟类目标进行驱赶。
72.本实施例中,驱鸟单元可实现多种方式的驱鸟,包括但不限于超声波驱鸟器、声控驱鸟器、光控驱鸟器等驱鸟设备。
73.在具体实现时,可利用定向声波驱鸟器进行驱鸟。其中,定向声波是一种定向性远程声波发射设备,其关键在于依靠先进的技术将声波控制聚集在30度波束范围内,向远距离目标发出警告,威慑,驱赶的声音,是一种高声压远距离驱赶过境的候鸟和留鸟的有效手段,特别适用于驱赶跑道两旁及上方的各类鸟群。360度旋转台有效增强了定向声波驱鸟器的作用范围,旋转台可以固定安装在风电机组顶端,覆盖广阔的范围,全天候全方位驱赶地面和空中的鸟群,保证风电机组的安全。
74.或者,也可利用全向声波驱鸟器进行驱鸟。其中,全向声波是对定向声波产品的有力补充,与定向声波产品不同,其发射声音不是定向的,而是全方位360度发射。全向声波驱鸟器,覆盖范围广阔,全天候驱赶空中和地面的鸟群,确保风电机组运行安全。
75.或者,也可利用激光驱鸟器进行驱鸟。对于鸟类而言,视觉是最为敏感的,尤其是对于波长为532nm的绿色激光。激光驱鸟器以仿生学为设计灵感,鸟将射向它的激光光束视为一种危险信号,使其产生恐吓或不适应效应,出于求生的本能,鸟儿会躲避射向它们的光束而快速飞走,以此将鸟类驱离,而不伤害鸟类。
76.可以理解的是,也可以同时使用上述任意两种,或同时使用上述三种驱鸟器驱鸟,或者也可以使用其他的驱鸟设备进行驱鸟,本实施例,对此不作限定。
77.本技术实施例中,对多信源数据采用预处理的方法,降低信号干扰和数据处理的工作量,并且采用多信源数据关联处理方法,对风电场的鸟类进行精准识别与跟踪,提高了驱鸟效果。
78.为了进一步提高驱鸟效果,在本技术的一个实施例中,该装置还可包括自组织神经网络单元。其中,自组织神经网络单元,与数据综合处理单元130连接。
79.自组织神经网络是一类无监督学习的神经网络模型,这类模型可采用竞争学习机制。自组织神经网络无需提供分类信号,它可以对外界未知环境(或样本空间)进行学习或
模拟,并对自身的网络结构进行适当的调整。
80.图2为自组织神经网络的结构示意图。如图2所示,自组织神经网络包括两层,一层是输入层,一层是竞争层,竞争层又称为输出层或者核心层。其中,输入层接收输入数据,竞争层对输入数据进行分类。
81.本技术中,在自组织神经网络的一次输入中,输入层神经元到竞争层神经元之间的连接权值,可随机给定,在竞争层每个神经元获取数据综合处理单元的第二数据的概率相同,竞争层会确定与第二数据相关度最高的数据综合处理单元。在连接权值调整中,相关程度最高的神经元连接权值增强,而其他神经元对应的连接权值保持不变。自组织神经网络通过这种竞争学习的方式,可确定相关区域中数据综合处理单元的第二数据对应的相关度最高的数据综合处理单元,并将第二数据发送给相关度最高的数据综合处理单元。、这里的相关区域可以理解为多信源综合处理护鸟装置所在的风电场。
82.可以理解的是,若某风电场部署了多个综合处理护鸟装置,那么对应有多个数据综合处理单元,自组织神经网络可确定每个数据综合处理单元相关区域中,与其第二数据对应的相关度最高的数据综合处理单元,并将第二数据发送给相关度最高的数据综合处理单元。
83.自组织神经网络单元,还可以接收相关区域中其他护鸟装置的数据综合处理单元发送的第三数据。
84.由于自组织神经网络单元,可接收相关区域中其他护鸟装置的数据综合处理单元发送的综合处理后的第三数据,数据综合处理单元130还可对第二数据和第三数据进行综合处理,比如进行关联与融合,得到第四数据。那么,控制单元140还可根据第四数据,向驱鸟单元发送驱鸟指令。从而,控制单元140根据本身的多个探测器采集的数据,以及相关区域中其他护鸟装置的多个探测器采集的数据,下发驱鸟指令。
85.本技术实施例中,可采用自组织神经网络单元,将鸟情信息传送至相关区域的护鸟装置,并接收相关区域其他护鸟装置的鸟情信息,实现鸟情信息共享,由此可对鸟类的航迹进行持续跟踪,从而提高识别的精准度,在保护鸟类的同时,最大限度保证风电机组运转。
86.在实际应用中,可能会存在驱鸟单元驱鸟失败的情况,比如驱鸟单元发生故障、或者驱鸟单元的驱鸟方法对鸟类不起作用。进一步地,为了保护鸟类,在本技术的一个实施例中,该装置还可包括护鸟单元,利用护鸟单元保护鸟类安全通过风电场。
87.其中,护鸟单元与控制单元140连接。具体地,若驱鸟单元150启动后未能驱鸟成功,则控制单元140,可根据多个探测器位置信息与护鸟单元比如风电设备的位置信息相关联,向相关的风电设备下发停机指令,风电设备根据停机指令停机,直至鸟类飞离风电场区域后中央控制器向相关的风电设备下发重启指令。
88.本技术实施例中,在驱鸟单元驱鸟失败的情况下,通过利用护鸟单元保证鸟类安全通过风电场区域,保护了鸟类。
89.在本技术的一个实施例中,上述多个探测传感器为雷达、激光、闭路电视(closed circuit television,简称cctv)、红外热成像仪中的多种。
90.其中,雷达可进行远程探测鸟类。具体地,雷达可实时获得鸟类目标的数目、距离、方位、速度、高度、运动轨迹等信息,可自动对鸟类大小进行判断分类;并可实时采集与存储
数据,掌握鸟类活动的迁徙、觅食、过冬、夜栖等的季节性、气象因素、活动区域等规律。
91.其中,激光可对鸟类进行中程探测。具体地,激光采用脉冲激光测距原理,通过多波束发射体制直接获得鸟类目标的三维坐标信息。
92.红外热成像仪可对鸟类进行近程探测。红外热成像仪可作为雷达探测鸟类的补充手段,红外热成像仪可自动输出报警系统开关量,一旦异常时及时提醒;同时,可追踪画面中设定的目标,实现特定目标的监测。当红外热传感器产生报警时,红外热像仪会自动指向该报警坐标。
93.cctv可对鸟类进行近程探测,cctv可作为雷达探测鸟类的补充手段。cctv具有较高放大倍率,当出现警报后,可通过cctv视频直接勘测现场。同时,通过高精度云台的测角能力,结合地理信息系统(geographic information system或geo-information system,gis),实现对现场的初步定位,从而便于进一步处置。
94.本技术实施例中,可利用雷达、激光、cctv、红外热成像系统等多个探测传感器对鸟类进行探测,从而得到多个信源的数据,获取鸟情信息的途径多样化,那么对多个信源的进行数据综合处理,以对经过风电场的鸟类进行保护,提高了驱鸟效果。
95.在本技术的一个实施例中,该装置还可包括数据存储单元。其中,数据存储单元,用于存储经数据综合处理单元综合处理过的活动轨迹信息,即用于存储第二数据。
96.下面结合图3、图4、图5、图6,以具体实施例进行说明。图3为本技术提供的一种具体的基于风电场的多信源综合处理护鸟装置的结构示意图。图4为本技术实施例提供的数据处理单元组成框图。图5为本实施例提供的一种风电场自组织神经网络示意图。图6为本技术实施例提供的一种基于风电场的多信源综合处理护鸟装置的示意图。
97.图3所示的基于风电场的多信源综合处理护鸟装置中包括雷达111、cctv112、激光113和红外热成像仪114四个探测传感器、数据预处理单元120、数据综合处理单元130、控制单元140、驱鸟单元150、数据存储单元160、自组织神经网络单元170和护鸟单元180。其中,四个探测传感器均与数据预处理单元120连接,数据综合处理单元130与数据预处理单元120连接,数据综合处理单元130还与控制单元140、数据存储单元160连接,控制单元140还分别与驱鸟单元150和护鸟单元180单元连接。
98.本实施例中,雷达111、cctv 112、激光113和红外热成像仪114四个探测传感器对鸟类的数据进行采集,数据预处理单元20是对雷达111、cctv112、激光113和红外热成像仪114四个探测传感器采集的数据进行预处理,数据综合处理单元130对预处理后的数据进行综合处理,并将综合处理后的数据发送给控制单元140。
99.另外,自组织神经网络单元170还可将相关区域鸟类轨迹信息发送给数据综合处理单元130,以使数据综合处理单元130对本区域鸟类轨迹信息和相关区域鸟类轨迹信息进行综合处理,比如关联与融合处理等。从而,控制单元140,可根据本区域鸟类轨迹信息和相关区域鸟类轨迹信息,向护鸟单元150下发驱鸟指令,提高了驱鸟的准确性和效果。
100.控制单元140根据综合处理后的数据,对驱鸟单元150下发驱鸟指令,以使驱鸟单元150对鸟类进行驱赶。数据存储单元160还可对综合处理后的数据进行存储,具体地,如图4所示,可利用大容量存储器进行存储。
101.当驱鸟单元150驱鸟失败时,控制单元140还可向护鸟单元180发送停机指令,以使护鸟单元180比如风机设备停止运行,当鸟类安全通过后,再启动运行。
102.图4中,可将数据预数据处理单元、数据综合处理单元、控制单元等作为数据处理单元的组成部分。数据处理的过程如下:
103.将多源信息数据输入至数据预处理单元,数据预处理单元中i/o接口电路接收多源信息数据,然后经过a/d转换得到数字信号,之后对数字信号进行数字下变频,之后再进行滤波处理,并将滤波后的数据发送给数据综合处理单元进行综合处理。其中,数据预处理单元可通过现场可编程逻辑门阵列(field programmable gate array,简称fpga)实现。
104.具体地,数据综合处理单元对滤波后的数据进行航迹数据校准,然后对校准后的数据进行航迹关联与融合,对融合得到的数据进行航迹滤波与跟踪。其中,数据综合处理单元可通过数字信号处理(digital signal process,简称dsp)实现。另外,还利用数据存储单元,比如大容量存储器,存储数字综合处理单元处理后的数据。
105.数据综合处理单元将处理后的数据发送给控制单元,由控制单元的cpu进行控制,具体地,可根据融合处理的数据向驱鸟单元发送驱鸟指令。其中,控制单元也可由dsp实现。
106.另外,图4中还包括供电单元,通过电源为各个单元供电。
107.图5中,某风电场包括区域1至区域n共n个区域,其中,每个区域中包括自组织神经网络设备,各个区域之间可共享鸟情信息。如图6所示,自组织神经网络可将cctv、雷达、红外热成像仪、激光雷达等采集的鸟类的信息发送给其他护鸟装置的数据综合处理器。
108.另外,可使用全向超声波驱鸟器和全向超声波驱鸟器对鸟类进行驱赶,数据综合处理器可对共享到的其他护鸟装置采集的数据和本身所在护鸟装置采集的数据进行处理,并利用控制器对驱鸟器进行控制。
109.为了实现上述实施例,本技术实施例还提出一种基于风电场的多信源综合处理护鸟方法。图7为本技术实施例提供的一种基于风电场的多信源综合处理护鸟方法的流程示意图。
110.本实施例中,基于风电场的多信源综合处理护鸟方法可应用基于风电场的多信源综合处理护鸟装置。该装置包括:多信源探测单元、数据预处理单元、数据综合处理单元、控制单元、驱鸟单元。其中,多信源探测单元与数据预处理单元连接,数据综合处理单元分别与数据预处理单元连接和控制单元连接,控制单元与驱鸟单元连接,具体的可如图1所示。
111.如图7所示,该基于风电场的多信源综合处理护鸟方法包括:
112.步骤201,多信源探测单元对鸟类目标进行数据采集。
113.本实施例中,多信源探测单元可包括多个探测传感器,通过多个探测传感器对鸟类目标进行数据采集。具体地,可采集鸟类目标的坐标信息、飞行速度、飞行高度等数据。
114.步骤202,数据预处理单元对多个探测传感器采集的数据进行预处理,获取第一数据。
115.本实施例中,多信源探测单元与数据预处理单元连接,数据预处理单元可对每个探测传感器采集的数据进行预处理,获取第一数据。具体地,可对采集的数据进行模数转换、滤波等处理。
116.数据预处理单元可将每个探测传感器采集的数据中的杂波和不需要的信息剔除,得到测量的动态鸟类目标信息,从而减少数据存储量。数据预处处理单元还可建立机动目标运动一致度模型,以判定测量数据的一致程度,剔除野点。本实施例中,经过数据预处理,可以确保参与目标状态估计的都是优质的测量数据,不仅提高目标跟踪精度,且减少了参
与数据融合的测量数据量以及通信开销。
117.其中,杂波主要来自探测传感器采集过程中存在的随机的虚警、虚假目标产生的杂波、干扰目标等。数据预处理是在对采集的数据进行综合处理之前,先进行筛选,将不在门限之内的数据剔除,并将经过所有判决门限的数据保留。数据预处理的好处在于使得后续数据处理过程中数据的规模明显减小,计算量大幅下降,在一定程度上能够减轻计算机的负担,提高数据处理的速度和目标跟踪的精度,同时使虚假航迹形成的可能性降低。
118.步骤203,数据综合处理单元对第一数据进行综合处理,获取第二数据。
119.数据综合处理单元与数据预处理单元0连接,数据预处理单元可将预处理得到的第一数据发送给数据综合处理单元。数据综合处理单元可对第一数据进行综合处理,获取第二数据。
120.本实施例中,对第一数据进行综合处理包括对第一数据进行标定、关联、融合与识别等处理,具体过程如上述图1实施例中所示,故在此不再赘述。
121.步骤204,控制单元根据第二数据,向驱鸟单元发送驱鸟指令。
122.本实施例中,控制单元140可根据综合处理得到的第二数据,向驱鸟单元发送驱鸟指令。
123.具体地,控制单元可根据数据综合处理结果,将多个探测器位置信息与预设的驱鸟单元之间的位置信息相关联,向相关的驱鸟单元下发驱鸟指令。
124.步骤205,驱鸟单元根据驱鸟指令对鸟类目标进行驱赶。
125.本实施例中,驱鸟单元可接收控制单元发送的驱鸟指令,并根据驱鸟指令对鸟类目标进行驱赶。
126.本实施例中,驱鸟单元可实现多种方式的驱鸟,包括但不限于超声波驱鸟器、声控驱鸟器、光控驱鸟器等驱鸟设备。比如,可利用定向声波驱鸟器进行驱鸟、全向声波驱鸟器等进行驱鸟,具体的可见上述实施例所述,在此不再赘述。
127.本技术实施例中,对多信源数据采用预处理的方法,降低信号干扰和数据处理的工作量,并且采用多信源数据关联处理方法,对风电场的鸟类进行精准识别与跟踪,提高了驱鸟效果。
128.为了进一步提高驱鸟效果,在本技术的一个实施例中,该装置还可包括自组织神经网络单元。其中,自组织神经网络单元与数据综合处理单元连接。
129.该方法还包括:自组织神经网络单元,可以确定相关区域中第二数据对应的相关度最高的数据综合处理单元,并将第二数据发送至相关度最高的数据综合处理单元,以及接收相关区域中其他护鸟装置的数据综合处理单元发送的第三数据。
130.由于自组织神经网络单元,可接收相关区域中其他护鸟装置的数据综合处理单元发送的综合处理后的第三数据,数据综合处理单元还可对第二数据和第三数据进行综合处理,比如进行关联与融合,得到第四数据。那么,控制单元还可根据第四数据,向驱鸟单元发送驱鸟指令。从而,控制单元根据本身的多个探测器采集的数据,以及相关区域中其他护鸟装置的多个探测器采集的数据,下发驱鸟指令。
131.本技术实施例中,可采用自组织神经网络单元,将鸟情信息传送至相关区域的护鸟装置,并接收相关区域其他护鸟装置的鸟情信息,实现鸟情信息共享,由此可对鸟类的航迹进行持续跟踪,从而提高识别的精准度,在保护鸟类的同时,最大限度保证风电机组运
转。
132.在实际应用中,可能会存在驱鸟单元驱鸟失败的情况,比如驱鸟单元发生故障、或者驱鸟单元的驱鸟方法对鸟类不起作用。进一步地,为了保护鸟类,在本技术的一个实施例中,该装置还可包括护鸟单元,利用护鸟单元保护鸟类安全通过风电场。
133.其中,护鸟单元与控制单元连接。具体地,若驱鸟单元启动后未能驱鸟成功,则控制单元,可根据多个探测器位置信息与护鸟单元比如风电设备的位置信息相关联,向相关的风电设备下发停机指令,风电设备根据停机指令停机,直至鸟类飞离风电场区域后中央控制器向相关的风电设备下发重启指令。
134.本技术实施例中,在驱鸟单元驱鸟失败的情况下,通过利用护鸟单元保证鸟类安全通过风电场区域,保护了鸟类。
135.在本技术的一个实施例中,上述多个探测传感器为雷达、激光、闭路电视cctv、红外热成像仪中的多种。
136.其中,雷达可进行远程探测鸟类。具体地,雷达可实时获得鸟类目标的数目、距离、方位、速度、高度、运动轨迹等信息,可自动对鸟类大小进行判断分类;并可实时采集与存储数据,掌握鸟类活动的迁徙、觅食、过冬、夜栖等的季节性、气象因素、活动区域等规律。
137.其中,激光可对鸟类进行中程探测。具体地,激光采用脉冲激光测距原理,通过多波束发射体制直接获得鸟类目标的三维坐标信息。
138.红外热成像仪可对鸟类进行近程探测。红外热成像仪可作为雷达探测鸟类的补充手段,红外热成像仪可自动输出报警系统开关量,一旦异常时及时提醒;同时,可追踪画面中设定的目标,实现特定目标的监测。当红外热传感器产生报警时,红外热像仪会自动指向该报警坐标。
139.cctv可对鸟类进行近程探测,cctv可作为雷达探测鸟类的补充手段。cctv具有较高放大倍率,当出现警报后,可通过cctv视频直接勘测现场。同时,通过高精度云台的测角能力,结合地理信息系统(geographic information system或geo-information system,gis),实现对现场的初步定位,从而便于进一步处置。
140.本技术实施例中,可利用雷达、激光、cctv、红外热成像系统等多个探测传感器对鸟类进行探测,从而得到多个信源的数据,获取鸟情信息的途径多样化,那么对多个信源的进行数据综合处理,以对经过风电场的鸟类进行保护,提高了驱鸟效果。
141.在本技术的一个实施例中,该装置还可包括数据存储单元。其中,数据存储单元,用于存储经数据综合处理单元综合处理过的活动轨迹信息,即用于存储第二数据。
142.在本说明书的描述中,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
143.尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型。