1.本实用新型属于鱼钩制造技术领域,特别涉及a01k91/04领域,具体涉及一种鱼钩自动绕线装置。
背景技术:
2.为了降低钓鱼爱好者将钓鱼线和鱼钩进行绑定时的难度,目前市场上出现了将一段钓鱼线和鱼钩提前进行预固定的钓具产品。
3.公开号为cn105900949a的中国专利公开了一种自动鱼钩绑线器,极大化将人力从绑钩过程中解放出来,仅仅在最初卡鱼钩,中途将鱼线的b端固定到鱼线夹头,剪线拆鱼钩等短暂迅速的过程需手完成,绕线等长距离操作完全机械完成,更加安全便捷。步进电机的设计能电动控制可转圆盘的开,关,同时能让可转圆盘转动特定角度,使线圈夹具运动到最为合适的位置。
4.目前的技术实践中,在绑线工序中需要带动鱼钩转动,鱼钩的结构细小且锋利,高速转动的过程中一旦发生脱落飞离可能会对操作人员造成严重伤害。
技术实现要素:
5.针对上述问题,本实用新型提供了一种鱼钩自动绕线装置,包括夹持组件、第一平动平台、第二平动平台,所述夹持组件固定设置在所述第一平动平台上,所述第一平动平台固定设置在所述第二平动平台上,所述第一平动平台的平动方向与所述第二平动平台的平动方向互相垂直。
6.作为一种优选的技术方案,所述夹持组件包括第一夹持臂和第二夹持臂,所述第一夹持臂和第二夹持臂并列设置,所述第一夹持臂和第二夹持臂之间的连线和所述第一平动平台的平动方向平行。
7.作为一种优选的技术方案,所述第一夹持臂和第二夹持臂的夹持开合方向与所述第二平动平台的平动方向平行。
8.作为一种优选的技术方案,所述第一夹持臂的端部设置为沿所述第一夹持臂的延伸方向设置的通孔结构。
9.作为一种优选的技术方案,所述第二夹持臂的端部设置为沿所述第二夹持臂的延伸方向设置的锯齿啮合结构。
10.作为一种优选的技术方案,还包括定线组件,所述定线组件包括夹头,夹头固定设置在一个伸缩机构上,该伸缩机构带动所述夹头在竖直方向上下运动。
11.作为一种优选的技术方案,所述夹头在朝向所述夹持组件的侧面设置有抬线块,所述抬线块的高度低于所述夹头的端部高度,所述抬线块的高度高于所述夹头根部的高度。
12.作为一种优选的技术方案,还包括第三平动平台,所述第三平动平台的平动方向同时垂直于所述第一平动平台和第二平动平台。
13.作为一种优选的技术方案,所述第二平动平台固定设置在所述第三平动平台上。
14.作为一种优选的技术方案,所述第一平动平台、第二平动平台、第三平动平台采用链轮机构实现平动。
15.有益效果:本实用新型提供了一种鱼钩自动绕线装置,用于鱼钩的全自动绑线工序,通过第一平动平台和第二平动平台的平动,将两个相互垂直的平动合成夹持组件的绕鱼钩的转动,通过第二夹持臂固定钓鱼线,通过第一夹持臂将钓鱼线缠绕并固定在在鱼钩上,这样将鱼钩固定不动,通过钓鱼线的运动来对鱼钩进行缠绕,一方面不用担心鱼钩飞射伤人,另一方面鱼钩位置在绕线工序时可以保持位置和姿态不变,从而方便下一个工序的衔接进行。
16.通过在第一夹持臂端部设置通孔结构,为钓鱼线提供限位功能,为环绕鱼钩的自动绕线提供稳定的限位作用,保证钓鱼线在通孔结构中可以持续进给,并且实现环绕动作。
17.夹头侧面设置有抬线块,用于将钓鱼线的线头抬起,在夹头的夹持效果下保持钓鱼线的一端稳定,再通过夹持组件的驱动将钓鱼线固定在鱼钩上。
附图说明
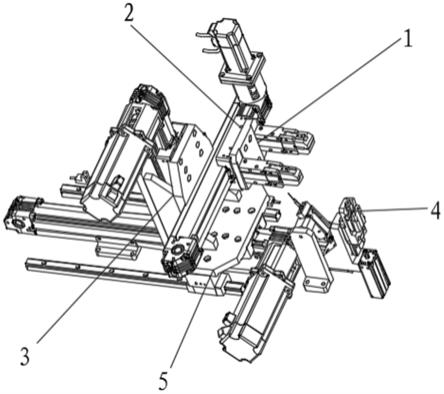
18.图1是本实用新型提供的一种鱼钩自动绕线装置的结构示意图;
19.图2是夹持组件的结构示意图;
20.其中,1-夹持组件、11-第一夹持臂、12-第二夹持臂、2-第一平动平台、3-第二平动平台、4-定线组件、5-第三平动平台。
具体实施方式
21.一种鱼钩自动绕线装置,包括夹持组件1、第一平动平台2、第二平动平台3,所述夹持组件1固定设置在所述第一平动平台2上,所述第一平动平台2固定设置在所述第二平动平台3上,所述第一平动平台2的平动方向与所述第二平动平台3的平动方向互相垂直。
22.在一些优选的实施方式中,所述夹持组件1包括第一夹持臂11和第二夹持臂12,所述第一夹持臂11和第二夹持臂12并列设置,所述第一夹持臂11和第二夹持臂12之间的连线和所述第一平动平台2的平动方向平行。
23.在一些优选的实施方式中,所述第一夹持臂11和第二夹持臂12的夹持开合方向与所述第二平动平台3的平动方向平行。
24.在一些优选的实施方式中,所述第一夹持臂11的端部设置为沿所述第一夹持臂11的延伸方向设置的通孔结构。
25.在一些优选的实施方式中,所述第二夹持臂12的端部设置为沿所述第二夹持臂12的延伸方向设置的锯齿啮合结构。
26.在一些优选的实施方式中,还包括定线组件4,所述定线组件4包括夹头,夹头固定设置在一个伸缩机构上,该伸缩机构带动所述夹头在竖直方向上下运动。
27.在一些优选的实施方式中,所述夹头在朝向所述夹持组件1的侧面设置有抬线块,所述抬线块的高度低于所述夹头的端部高度,所述抬线块的高度高于所述夹头根部的高度。夹头侧面设置有抬线块,用于将钓鱼线的线头抬起,在夹头的夹持效果下保持钓鱼线的一端稳定,再通过夹持组件的驱动将钓鱼线固定在鱼钩上。
28.在一些优选的实施方式中,还包括第三平动平台5,所述第三平动平台5的平动方向同时垂直于所述第一平动平台2和第二平动平台3。
29.在一些优选的实施方式中,所述第二平动平台3固定设置在所述第三平动平台5上。
30.在一些优选的实施方式中,所述第一平动平台2、第二平动平台3、第三平动平台5采用链轮机构实现平动。
31.通过链轮机构对各个平动平台进行驱动,同时保证传动效率和位置准确性。
32.工作原理:本实用新型提供了一种鱼钩自动绕线装置,用于鱼钩的全自动绑线工序,通过第一平动平台和第二平动平台的平动,将两个相互垂直的平动合成夹持组件的绕鱼钩的转动,通过第二夹持臂固定钓鱼线,通过第一夹持臂将钓鱼线缠绕并固定在在鱼钩上,这样将鱼钩固定不动,通过钓鱼线的运动来对鱼钩进行缠绕,一方面不用担心鱼钩飞射伤人,另一方面鱼钩位置在绕线工序时可以保持位置和姿态不变,从而方便下一个工序的衔接进行。
33.通过在第一夹持臂端部设置通孔结构,为钓鱼线提供限位功能,为环绕鱼钩的自动绕线提供稳定的限位作用,保证钓鱼线在通孔结构中可以持续进给,并且实现环绕动作。
技术特征:
1.一种鱼钩自动绕线装置,其特征在于,包括夹持组件(1)、第一平动平台(2)、第二平动平台(3),所述夹持组件(1)固定设置在所述第一平动平台(2)上,所述第一平动平台(2)固定设置在所述第二平动平台(3)上,所述第一平动平台(2)的平动方向与所述第二平动平台(3)的平动方向互相垂直。2.根据权利要求1所述的鱼钩自动绕线装置,其特征在于,所述夹持组件(1)包括第一夹持臂(11)和第二夹持臂(12),所述第一夹持臂(11)和第二夹持臂(12)并列设置,所述第一夹持臂(11)和第二夹持臂(12)之间的连线和所述第一平动平台(2)的平动方向平行。3.根据权利要求2所述的鱼钩自动绕线装置,其特征在于,所述第一夹持臂(11)和第二夹持臂(12)的夹持开合方向与所述第二平动平台(3)的平动方向平行。4.根据权利要求3所述的鱼钩自动绕线装置,其特征在于,所述第一夹持臂(11)的端部设置为沿所述第一夹持臂(11)的延伸方向设置的通孔结构。5.根据权利要求4所述的鱼钩自动绕线装置,其特征在于,所述第二夹持臂(12)的端部设置为沿所述第二夹持臂(12)的延伸方向设置的锯齿啮合结构。6.根据权利要求5所述的鱼钩自动绕线装置,其特征在于,还包括定线组件(4),所述定线组件(4)包括夹头,夹头固定设置在一个伸缩机构上,该伸缩机构带动所述夹头在竖直方向上下运动。7.根据权利要求6所述的鱼钩自动绕线装置,其特征在于,所述夹头在朝向所述夹持组件(1)的侧面设置有抬线块,所述抬线块的高度低于所述夹头的端部高度,所述抬线块的高度高于所述夹头根部的高度。8.根据权利要求7所述的鱼钩自动绕线装置,其特征在于,还包括第三平动平台(5),所述第三平动平台(5)的平动方向同时垂直于所述第一平动平台(2)和第二平动平台(3)。9.根据权利要求8所述的鱼钩自动绕线装置,其特征在于,所述第二平动平台(3)固定设置在所述第三平动平台(5)上。10.根据权利要求9所述的鱼钩自动绕线装置,其特征在于,所述第一平动平台(2)、第二平动平台(3)、第三平动平台(5)采用链轮机构实现平动。
技术总结
本实用新型属于鱼钩制造技术领域,特别涉及A01K91/04领域,具体涉及一种鱼钩自动绕线装置。本实用新型提供了一种鱼钩自动绕线装置,包括夹持组件、第一平动平台、第二平动平台,所述夹持组件固定设置在所述第一平动平台上,所述第一平动平台固定设置在所述第二平动平台上,所述第一平动平台的平动方向与所述第二平动平台的平动方向互相垂直。通过第一平动平台和第二平动平台的平动,将两个相互垂直的平动合成夹持组件的绕鱼钩的转动,通过第二夹持臂固定钓鱼线,通过第一夹持臂将钓鱼线缠绕并固定在在鱼钩上,这样将鱼钩固定不动,通过钓鱼线的运动来对鱼钩进行缠绕,不用担心鱼钩飞射伤人。飞射伤人。飞射伤人。
技术研发人员:占志波
受保护的技术使用者:鄱阳县黑金刚钓具有限责任公司
技术研发日:2021.09.16
技术公布日:2022/2/19