1.本实用新型涉及一种刮粪机,具体涉及一种猪牛舍链条式智能刮粪机,属于刮粪机技术领域。
背景技术:
2.目前,在规模化养猪场一般会用隔栏分割成若干个圈栏,在圈栏的排粪区下面设置粪沟,在一圈栏内横跨粪沟间隔设置两个以上的横梁,在横梁上架设地板,在地板端部之间留设作为出粪口的缝隙,在缝隙的上方设置遮拦物,在每一圈栏内设置一个刮粪板,各刮粪板串联为刮粪板组,刮粪板组采用同一套动力和传动机构拖动,往复移动刮集粪便,并推送到出粪口排出;但现有的刮粪机工作时无法监测,且刮粪机结构无法灵活布局。
技术实现要素:
3.为解决上述问题,本实用新型提出了一种猪牛舍链条式智能刮粪机,布置简单,能够适用于各粪道长度不一的畜舍;整个刮粪机能够实现电机定时、定行程的自动运行模式。
4.本实用新型的猪牛舍链条式智能刮粪机,包括立柱体,所述立柱体内侧顶部嵌有动力座;所述立柱体内侧和动力座之间固定有丝杠千斤顶,丝杠千斤顶能够驱动立柱体和动力座进行收缩和上顶,从而调整链条张紧度;所述立柱体上设置有用于驱动丝杠千斤顶动作的操作口,通过操作口可调整丝杠千斤顶动作;所述动力座顶部固定有减速电机;所述减速电机其转轴上固定有传动轮;所述立柱体底部前侧固定有相互垂直的竖向转角轮总成;所述竖向转角轮总成其轴心线与地面平行;两所述竖向转角轮总成外部与其正对设置有横向转角轮总成;所述横向转角轮总成其轴心线与地面垂直;两所述横向转角轮总成之间还正对设置有用于过渡的横向转角轮总成;所述传动轮、两竖向转角轮总成和三横向转角轮总成之间穿过链条形成闭环;所述链条上串接有刮粪板;减速电机转动,驱动传动轮转动,传动轮驱动链条动作,链条分别绕传动轮、两竖向转角轮总成和三横向转角轮总成进行圆周运动;从而带动刮粪板进行直线刮粪运动;刮粪板在粪道内运行;无需建筑调整,因此畜舍建筑费用的极大节约;且通过竖向转角轮总成和横向转角轮总成配合,适用于各粪道长度不一的畜舍;整个设备都安装在刮粪道上, 立柱体支撑减速电机脱离粪道。
5.进一步地,所述减速电机其转轴上固定有编码器;所述编码器和减速电机接入plc;所述plc通信连接有控制面板;所述刮粪板远离刮粪一侧固定有接入plc的接近开关;接近开关检测到异物如猪牛,则刮粪板停止动作,与plc通信的报警灯自行闪烁,与此同时刮粪板自行后退5m ,必须人工重启,防止二次刮伤;包括清粪时间控制、清粪周期控制、刮板行程控制、手动控制、防冻控制、遇牛停止警示控制等;通过控制面板能够设定减速电机工作模式,如清粪时间控制、清粪周期控制、刮板行程控制、手动控制、防冻控制和遇牛停止警示控制等;其能够实现电机定时、定行程的自动运行模式。
6.进一步地,所述动力座外部固定有电机罩。
7.进一步地,所述竖向转角轮总成和横向转角轮总成包括转角轮护套,及通过轮轴
安装于转角轮护套内侧的转角轮;所述立柱体底部固定有框型的直角板;所述竖向转角轮总成其转角轮护套固定于直角板上;所述横向转角轮总成其转角轮护套通过撑脚与地面固定;所述转角轮护套远离进线和出线一侧固定有转角轮挡板;转角轮护套作为转角轮的支撑件和导向件,链条进入到转角轮护套,并通过转角轮对链条进行导向。
8.进一步地,所述立柱体前端两侧固定有护链方管。
9.与现有技术相比,本实用新型的猪牛舍链条式智能刮粪机,无需建筑调整,畜舍建筑费用的极大节约,整个设备都安装在刮粪道上, 适用于各粪道长度不一的畜舍,且立柱体支撑减速电机脱离粪道;整个刮粪机能够实现电机定时、定行程的自动运行模式。
附图说明
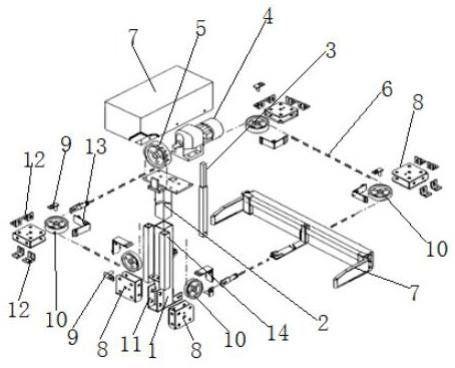
10.图1为本实用新型的实施例1整体结构示意图。
11.图2为本实用新型的动力立柱结构示意图。
12.图3为本实用新型的plc柜体结构示意图。
具体实施方式
13.实施例1:
14.如图1所示的猪牛舍链条式智能刮粪机,包括立柱体1,所述立柱体1内侧顶部嵌有动力座2;所述立柱体1内侧和动力座2之间固定有丝杠千斤顶3,丝杠千斤顶能够驱动立柱体和动力座进行收缩和上顶,从而调整链条张紧度;所述立柱体1上设置有用于驱动丝杠千斤顶动作的操作口,通过操作口可调整丝杠千斤顶动作;所述动力座2顶部固定有减速电机4;所述减速电机4其转轴上固定有传动轮5;所述立柱体1底部前侧固定有相互垂直的竖向转角轮总成;所述竖向转角轮总成其轴心线与地面平行;两所述竖向转角轮总成外部与其正对设置有横向转角轮总成;所述横向转角轮总成其轴心线与地面垂直;两所述横向转角轮总成之间还正对设置有用于过渡的横向转角轮总成;所述传动轮、两竖向转角轮总成和三横向转角轮总成之间穿过链条6形成闭环;所述链条6上串接有刮粪板7;减速电机转动,驱动传动轮转动,传动轮驱动链条动作,链条分别绕传动轮、两竖向转角轮总成和三横向转角轮总成进行圆周运动;从而带动刮粪板进行直线刮粪运动;刮粪板在粪道内运行;无需建筑调整,因此畜舍建筑费用的极大节约;且通过竖向转角轮总成和横向转角轮总成配合,适用于各粪道长度不一的畜舍;整个设备都安装在刮粪道上, 立柱体支撑减速电机脱离粪道。
15.其中,所述减速电机4其转轴上固定有编码器15;所述编码器15和减速电机4接入plc16;所述plc16通信连接有控制面板17;所述刮粪板7远离刮粪一侧固定有接入plc的接近开关;接近开关检测到异物如猪牛,则刮粪板停止动作,与plc通信的报警灯18自行闪烁,与此同时刮粪板自行后退5m ,必须人工重启,防止二次刮伤;包括清粪时间控制、清粪周期控制、刮板行程控制、手动控制、防冻控制、遇牛停止警示控制等;通过控制面板能够设定减速电机工作模式,如清粪时间控制、清粪周期控制、刮板行程控制、手动控制、防冻控制和遇牛停止警示控制等;其能够实现电机定时、定行程的自动运行模式。
16.其中,所述动力座2外部固定有电机罩7。所述竖向转角轮总成和横向转角轮总成包括转角轮护套8,及通过轮轴9安装于转角轮护套内侧的转角轮10;所述立柱体1底部固定
有框型的直角板11;所述竖向转角轮总成其转角轮护套8固定于直角板11上;所述横向转角轮总成其转角轮护套8通过撑脚12与地面固定;所述转角轮护套8远离进线和出线一侧固定有转角轮挡板13;转角轮护套作为转角轮的支撑件和导向件,链条进入到转角轮护套,并通过转角轮对链条进行导向。所述立柱体1前端两侧固定有护链方管14。
17.上述实施例,仅是本实用新型的较佳实施方式,故凡依本实用新型专利申请范围所述的构造、特征及原理所做的等效变化或修饰,均包括于本实用新型专利申请范围内。
技术特征:
1.一种猪牛舍链条式智能刮粪机,其特征在于:包括立柱体,所述立柱体内侧顶部嵌有动力座;所述立柱体内侧和动力座之间固定有丝杠千斤顶;所述立柱体上设置有用于驱动丝杠千斤顶动作的操作口;所述动力座顶部固定有减速电机;所述减速电机其转轴上固定有传动轮;所述立柱体底部前侧固定有相互垂直的竖向转角轮总成;所述竖向转角轮总成其轴心线与地面平行;两所述竖向转角轮总成外部与其正对设置有横向转角轮总成;所述横向转角轮总成其轴心线与地面垂直;两所述横向转角轮总成之间还正对设置有用于过渡的横向转角轮总成;所述传动轮、两竖向转角轮总成和三横向转角轮总成之间穿过链条形成闭环;所述链条上串接有刮粪板。2.根据权利要求1所述的猪牛舍链条式智能刮粪机,其特征在于:所述减速电机其转轴上固定有编码器;所述编码器和减速电机接入plc;所述plc通信连接有控制面板;所述刮粪板远离刮粪一侧固定有接入plc的接近开关。3.根据权利要求1所述的猪牛舍链条式智能刮粪机,其特征在于:所述动力座外部固定有电机罩。4.根据权利要求1所述的猪牛舍链条式智能刮粪机,其特征在于:所述竖向转角轮总成和横向转角轮总成包括转角轮护套,及通过轮轴安装于转角轮护套内侧的转角轮;所述立柱体底部固定有框型的直角板;所述竖向转角轮总成其转角轮护套固定于直角板上;所述横向转角轮总成其转角轮护套通过撑脚与地面固定;所述转角轮护套远离进线和出线一侧固定有转角轮挡板。5.根据权利要求1所述的猪牛舍链条式智能刮粪机,其特征在于:所述立柱体前端两侧固定有护链方管。
技术总结
本实用新型公开了一种猪牛舍链条式智能刮粪机,包括立柱体,所述立柱体内侧顶部嵌有动力座;所述立柱体内侧和动力座之间固定有丝杠千斤顶;所述立柱体上设置有用于驱动丝杠千斤顶动作的操作口;所述动力座顶部固定有减速电机;所述减速电机其转轴上固定有传动轮;所述立柱体底部前侧固定有相互垂直的竖向转角轮总成;所述竖向转角轮总成其轴心线与地面平行;本实用新型的猪牛舍链条式智能刮粪机,无需建筑调整,畜舍建筑费用的极大节约,整个设备都安装在刮粪道上,适用于各粪道长度不一的畜舍,且立柱体支撑减速电机脱离粪道;整个刮粪机能够实现电机定时、定行程的自动运行模式。式。式。
技术研发人员:马安玉
受保护的技术使用者:泰安欧凯畜牧科技有限公司
技术研发日:2021.05.11
技术公布日:2022/2/11