1.本发明涉及一种海洋系统碳中和方法,属于碳中和领域。
背景技术:
2.二氧化碳排放导致地球碳循环处于非平衡状态,全球气候变暖趋势愈发明显。而碳中和是解决这一问题的重要手段。
3.碳中和主要途径有两条,其一是减少碳排放,其二是捕集和封存已有的二氧化碳。针对第二种方式,国际上最为流行的做法是通过管道或船舶将大气中捕获到的二氧化碳运输到海洋中指定的封存地点,然后将其注入至海洋的水体、海底或海底面以下的地质结构中。在这种封存方式中,若注入至水体,则二氧化碳与水体接触时会造成局部海洋酸化,若二氧化碳封存在海底,在特定的温度和压力条件下,会形成液态二氧化碳海底“湖”或二氧化碳水合物,改变海底边界层的氧化还原环境,若二氧化碳封存在地质结构中,需要寻找合适的地质封存体,如已有的海上油气田或稳定的其他类型储集层。
4.上述方法中不论哪一种情况,都需要人员长期在海上作业,因此人工成本高昂,且海上环境不确定因素较多,具有较大的安全隐患。
技术实现要素:
5.本发明所要解决的技术问题在于克服现有技术的不足而提供一种海洋系统碳中和方法。
6.解决上述技术问题,本发明采用如下技术方案:一种海洋系统碳中和方法,海面处设置有海藻养殖区,海洋内设置有掩埋机器人和捕获机器人,捕获机器人在海藻养殖区捕获海藻,然后将捕获的海藻投放至海床,掩埋机器人在海床处将捕获机器人投放的海藻掩埋至海床下方,以使海藻处于缺氧环境。
7.本发明的有益效果为:在海藻养殖区进行海藻养殖,海面上方光照透过海水照射海藻,以使海藻将水溶二氧化碳转换成有机物进行生长增殖,无机碳从海水中转移至海藻内以有机碳的形式存在,从而将海洋中的碳向海藻养殖区进行富集。捕获机器人在海藻养殖区内对海藻进行捕捉收集,投放至海床,由掩埋机器人对海藻进行掩埋,使海藻中的有机碳转移至海床下方,从而使海藻中的碳脱离于海洋碳循环外,实现碳中和的目的。首先利用海藻进行水溶二氧化碳的收集转化工作,并由掩埋机器人和捕获机器人配合实现碳的转移掩埋,避免了人工长期海上作业,极大降低了人工成本和作业风险。海藻的增殖过程一定程度弥补了海藻掩埋造成的海藻数量损失,海藻的增殖过程和海藻捕获掩埋过程配合对海藻的总量进行调控,以调节整个海藻养殖区内海藻集群碳富集速率,保证了海藻养殖区能够对水溶二氧化碳进行长期可持续的富集转化,并且海藻在进行碳富集过程中产生氧气,有效改善海洋生态环境。捕获机器人将海藻收集投放后,海藻可以在重力作用下落到海床上,避免了捕获机器人在海藻养殖区和海床之间转移切换,减少了捕获机器人的移动行程,相应减少了捕获
机器人的能耗,使得捕获机器人能够专注于海藻捕获,从而提升海藻的捕获速率。掩埋后的海藻由于处于缺氧环境,因此分解产物不易形成二氧化碳,在海水高压作用下更容易封存在海床下方不易泄露,以实现较为稳定的碳中和效果。相较于直接将二氧化碳封存于海床下方,本发明采用海藻掩埋至海床下方这一方式,使得对海床的地质要求更低,掩埋场所的选择范围也更广,可以进行掩埋的面积也更大。同时海面上方大气中的二氧化碳和海水之间具有一个溶解平衡状态,随着海藻生长过程,海洋中二氧化碳的减少,大气中的二氧化碳也会进一步溶解至海水中,以此减少大气中的二氧化碳含量,平衡了大气中的碳循环过程。
8.本发明所述掩埋机器人上安装有钻探挖掘装置,掩埋机器人在海床处通过钻探挖掘装置进行钻孔和/或挖槽,将海藻填充至孔洞和/或沟槽内,然后使用海底沉积物进行掩埋。
9.本发明掩埋过程中海底沉积物内混有橄榄石,以使海藻中的有机碳转换为无机碳酸盐。
10.本发明所述捕获机器人上安装有抽吸过滤装置、摄像头、机械手和藻类处理装置;抽吸过滤装置抽吸海水,以对海水中的海藻进行富集,藻类处理装置对富集的海藻施加电场进行絮凝,以使海藻团聚形成藻球;捕获机器人依据摄像头获取的视频数据移动至海藻处,然后通过机械手对海藻进行抓取,藻类处理装置对抓取的海藻进行压缩,以使海藻收缩形成藻球。
11.本发明水中设置有能源转换装置和阿基米德螺旋泵,能源转换装置驱动阿基米德螺旋泵,以将海底处海水送往海藻养殖区,阿基米德螺旋泵的下端设置有锚泊块,锚泊块压在海床上。
12.本发明所述能源转换装置包括波浪能转换装置和太阳能电池板,海藻养殖区处海面设置有浮标,太阳能电池板安装在浮标上,波浪能转换装置位于海面下方。
13.本发明所述海藻养殖区的海面处设置有海上风机,海上风机的底部安装有定位桩和第一声学通讯装置,定位桩的下端固定在海床上,掩埋机器人和捕获机器人上均安装有第二声学通讯装置,第二声学通讯装置与第一声学通讯装置进行声学信号交互,以对掩埋机器人和捕获机器人的移动过程进行导航。
14.本发明所述定位桩上设置有多个非接触式充电头,非接触式充电头电连接至海上风机,非接触式充电头上安装有无线信号发射器,掩埋机器人和捕获机器人上均安装有无线信号接收器,无线信号接收器接收对应无线信号发射器发出的无线信号,以使掩埋机器人和捕获机器人移动至对应的非接触式充电头处进行充电。
15.本发明所述海藻养殖区设置有化学指标传感器、控制板和投放装置,当海藻养殖区的化学指标异常时,化学指标传感器发送信号至控制板,控制板控制投放装置对海藻养殖区投放养料和/或药物,以使海藻养殖区的化学指标恢复至正常数值。
16.本发明当海藻养殖区氮磷含量超标时,提升掩埋机器人和捕获机器人的工作速度。
17.本发明的其他特点和优点将会在下面的具体实施方式、附图中详细地揭露。
附图说明
18.下面结合附图对本发明做进一步的说明:
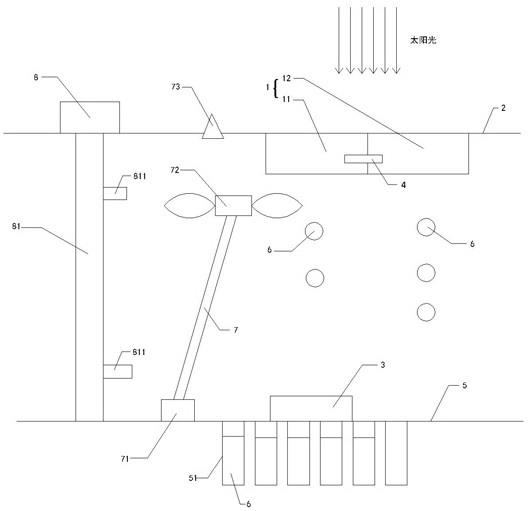
图1为本发明实施例中海洋系统平面结构图。
具体实施方式
19.下面结合本发明实施例的附图对本发明实施例的技术方案进行解释和说明,但下述实施例仅为本发明的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其他实施例,都属于本发明的保护范围。
20.在下文描述中,出现诸如术语“内”、“外”、“上”、“下”、“左”、“右”等指示方位或者位置关系仅是为了方便描述实施例和简化描述,而不是指示或暗示所指的装置或者元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
21.实施例:参见图1,本实施例提供了一种海洋系统碳中和方法,包括如下步骤:步骤s1:在海面2处设置海藻养殖区1,海藻养殖区1主要进行海藻养殖,海藻养殖区1处设置有捕获机器人4,捕获机器人4在海藻养殖区1捕获海藻,相应的捕获机器人4则主要在海藻养殖区1处进行活动;步骤s2:将捕获的海藻投放至海床5;步骤s3:海床5处设置有掩埋机器人3,掩埋机器人3主要在海床5处进行移动,掩埋机器人3将捕获机器人4投放的海藻掩埋至海床5下方。
22.由于海藻养殖区1位于近海面2位置,因此太阳光可以透过海水对海藻养殖区1中的海藻进行光照,以保证海藻的光合作用效率。海藻进行光合作用的时候,能够吸收海水中的水溶二氧化碳,并在海藻内部生成有机物,以促使海藻生长和增殖。在这一过程中,存在于水溶二氧化碳中的无机碳转移至海藻内以有机碳的形式存在,随着海水的流动,海洋中的碳逐渐向海藻养殖区1富集。随着海藻数量的增加,整个海藻养殖区1的碳富集速率也会相应增加。海藻在进行碳富集过程中产生氧气,增加了水中溶解氧含量,有效改善海洋生态环境。
23.具体的,海藻养殖区1包括微藻养殖区11和大型藻类养殖区12,微藻养殖区11进行微藻养殖,大型藻类养殖区12进行大型藻类养殖,以尽可能使微藻和大型藻类分开,具体养殖的微藻和大型藻类种类可以根据实际需求进行选择。
24.与之对应的,捕获机器人4上安装有抽吸过滤装置、摄像头、机械手和藻类处理装置。
25.当捕获机器人4位于微藻养殖区11处时,抽吸过滤装置抽吸海水,以对海水中的微藻进行过滤富集,捕获机器人4内部有足够的空间用以存放微藻,藻类处理装置对捕获机器人4内部富集的微藻施加电场进行絮凝,以使微藻团聚形成藻球6。
26.当捕获机器人4位于大型藻类养殖区12处时,摄像头对大型藻类养殖区12进行拍摄,以获取大型藻类的位置信息,捕获机器人4依据摄像头获取的视频数据移动至大型藻类处,然后通过机械手对大型藻类进行抓取,藻类处理装置对抓取的大型藻类进行压缩,以使大型藻类收缩形成藻球6。
27.由于微藻和大型藻类分区养殖,因此在大型藻类养殖区12处时抽吸过滤装置不需要进行工作,以防止捕获机器人4内部空间被大型藻类堵住,在微藻养殖区11处时机械手也不需要动作,以避免机械手影响抽吸过滤装置前方海水的流动。因此捕获机器人4在微藻养
殖区11和大型藻类养殖区12处均可以达到较高的捕获效率。
28.不论微藻还是大型藻类,在形成藻球6后其重量和密度都得到了显著提升,因此在重力作用下更容易下沉至海床5,不易被海流冲走,便于捕获机器人4的投放。
29.掩埋机器人3上安装有钻探挖掘装置,掩埋机器人3在海床5上移动,并通过钻探挖掘装置进行钻孔和挖槽,从而在海床5上形成孔洞51和沟槽。藻球6到达海床5上后由掩埋机器人3进行移动收集,掩埋机器人3将收集到的藻球6填充至孔洞51和沟槽内,并利用海底沉积物进行掩埋,此时藻球6中的有机碳脱离于海洋碳循环外,实现碳中和的目的。藻球6被掩埋后处于缺氧环境中,因此有效抑制了二氧化碳的生成,避免或者减少了藻球6中的碳以二氧化碳的形式从孔洞51和沟槽中溢出重新回到海洋碳循环过程中。此外在海水高压作用下藻球6更容易封存在海床5下方不易泄露,以实现较为稳定的碳中和效果。
30.更进一步的,掩埋过程中海底沉积物内混有橄榄石,此时孔洞51和沟槽内不仅处于缺氧环境,而且还形成碱性环境,此时藻球6中的高分子有机碳首先分解为低分子有机碳,而后在硫酸盐还原菌等微生物的矿化诱导作用下,低分子有机碳转换为无机碳酸盐,从而使碳以更为稳定的化学形式封存在孔洞51和沟槽内。
31.由于藻球6最终被掩埋在海床5下方,因此微藻絮凝过程和大型藻类压缩过程都不需要考虑藻类存活问题,故而在制作藻球6过程中可以实现较大的压缩率。在藻球6体积固定的情况下,单个藻球6中能够包含更多海藻,藻球6的密度和重量都更大,一方面更有利于藻球6向海床5的投放过程,另一方面可以使孔洞51和沟槽容纳更多海藻,从而增加孔洞51和沟槽的利用效率,提升海床5能够埋藏的碳总量,同时孔洞51和沟槽内海藻总量的增加能够进一步加剧孔洞51和沟槽内缺氧情况,从而进一步提升对二氧化碳生成的抑制效果。藻球6的掩埋对海床5地质要求低,因此进行掩埋作业的海床5范围较广。
32.由掩埋机器人3和捕获机器人4配合实现藻类(有机碳)的转移掩埋,避免了人工长期海上作业,极大降低了人工成本和作业风险。捕获机器人4将海藻收集投放后,海藻可以在重力作用下落到海床5上,避免了捕获机器人4和掩埋机器人3在海藻养殖区1和海床5之间转移切换,减少了捕获机器人4和掩埋机器人3的移动行程,相应减少了捕获机器人4和掩埋机器人3的能耗,使得捕获机器人4能够专注于海藻捕获,从而提升海藻的捕获速率,掩埋机器人3也能够专注于钻孔、挖槽和掩埋作业,提升藻球6的掩埋效率。
33.捕获机器人4和掩埋机器人3协同作业减少了海藻养殖区1中海藻总量,但是海藻的增殖过程一定程度弥补了海藻数量损失,因此通过海藻的增殖过程和海藻捕获掩埋过程配合能够对海藻的总量进行调控,从而调节整个海藻养殖区1内海藻集群碳富集速率。
34.海藻数量过多,虽然碳富集速率能够显著提升,但是容易造成水体富营养化,同时海藻死亡数量会同步增加,海藻内的有机碳重新分解为二氧化碳回到水中。海藻数量过少,则碳富集速率不足,相应的掩埋机器人3无法获得足够的藻球6在孔洞51和沟槽内及时进行填充掩埋,在非缺氧环境下藻球6重新分解产生二氧化碳进入水中。通过改变捕获机器人4和掩埋机器人3的工作速率,以配合海藻的增殖速度,从而使海藻的整体数量相对恒定,保证了海藻养殖区1能够对水溶二氧化碳进行长期可持续的富集转化。
35.水中设置有能源转换装置和阿基米德螺旋泵7。阿基米德螺旋泵7相对海面2倾斜设置,阿基米德螺旋泵7的下端设置有锚泊块71,锚泊块71压在海床5上,以对阿基米德螺旋泵7的下端进行定位。能源转换装置驱动阿基米德螺旋泵7,从而将海底富含营养物质的海
水送往海藻养殖区1,从而提升海藻的生长效果,增强海藻的碳富集能力。
36.能源转换装置包括波浪能转换装置72和太阳能电池板。海藻养殖区1处海面2设置有浮标73,太阳能电池板安装在浮标73上,太阳能电池板将太阳光转换成电能。波浪能转换装置72位于海面2下方,波浪能转换装置72将波浪能转换成电能。由波浪能转换装置72和太阳能电池板配合对阿基米德螺旋泵7进行供能,以控制阿基米德螺旋泵7正常工作。其中波浪能转换装置72和太阳能电池板均可以采用耐腐蚀的海洋线缆实现与阿基米德螺旋泵7的电连接。
37.在其他实施例中,波浪冲击波浪能转换装置72,波浪能转换装置72通过机械传动的方式带动阿基米德螺旋泵7工作。
38.能源转换装置采用太阳能和波浪能两种清洁能源驱动阿基米德螺旋泵7工作,避免了石油、天然气等化石能源的使用,避免海洋中循环碳含量进一步增加。
39.藻球6掩埋至海床5下方后,除了碳被封存之外,还有许多营养物质和元素会一并被封存,因此藻球6掩埋量增加后海洋中这部分营养物质和元素的循环能力会下降,造成海藻生长速率下降,并对海洋生态系统产生一定程度破坏。
40.为了解决这一问题,海藻养殖区1设置有化学指标传感器、控制板和投放装置。化学指标传感器对海藻养殖区1的特定化学药剂或者化学元素含量进行监测,当海藻养殖区1对应的化学指标异常时,化学指标传感器发送信号至控制板,由控制板控制投放装置对海藻养殖区1投放对应的养料和/或药物,以使海藻养殖区1的化学指标恢复至正常数值,从而保证海洋中营养物质和元素的正常循环,保证海藻的增殖速率。
41.例如当化学指标传感器监测到钾浓度偏低的时候,投放装置对海藻养殖区1投放合适的含钾药物,从而提升海藻养殖区1的钾浓度。
42.若海藻总量过大,海藻养殖区1呈现富营养化,化学指标传感器会检测到海藻养殖区1氮磷含量超标,此时控制板除了控制投放装置投放除氮磷的药物以降低氮磷含量外,还会通过无线模块发送信号至掩埋机器人3和捕获机器人4,控制掩埋机器人3和捕获机器人4提升工作速度,以降低海藻总量。
43.海藻养殖区1的海面2处设置有海上风机8,海上风机8的底部安装有定位桩81和第一声学通讯装置,定位桩81的下端固定在海床5上。海上风机8收集风能并转化成电能储存,同时海上风机8和第一声学通讯装置通过定位桩81定位在海床5上。第一声学通讯装置位于海面2下方,掩埋机器人3和捕获机器人4上均安装有第二声学通讯装置,第二声学通讯装置与第一声学通讯装置进行声学信号交互,从而确认掩埋机器人3和捕获机器人4在海中的位置,从而对掩埋机器人3和捕获机器人4的移动过程进行导航。
44.优选的,定位桩81上设置有多个非接触式充电头811,非接触式充电头811电连接至海上风机8,海上风机8产生的电能传导至非接触式充电头811,通过第二声学通讯装置与第一声学通讯装置的配合引导作用,引导掩埋机器人3和捕获机器人4前往非接触式充电头811处进行充电。采用非接触式充电头811能够极大提升水下充电过程中的安全性,同时降低掩埋机器人3和捕获机器人4充电过程中和非接触式充电头811的对准精度要求。同时采用风能对掩埋机器人3和捕获机器人4进行充电,同样规避了化石燃料的使用。
45.其中,非接触式充电头811上安装有无线信号发射器,掩埋机器人3和捕获机器人4上均安装有无线信号接收器,无线信号接收器接收对应无线信号发射器发出的无线信号,
以使掩埋机器人3和捕获机器人4移动至对应的非接触式充电头811处进行充电,从而防止掩埋机器人3和捕获机器人4同时需要充电时移动至同一个非接触式充电头811处发生碰撞损伤。
46.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,熟悉该本领域的技术人员应该明白本发明包括但不限于附图和上面具体实施方式中描述的内容。任何不偏离本发明的功能和结构原理的修改都将包括在权利要求书的范围中。