1.本技术涉及终端技术领域,尤其涉及到一种驱动模块、摄像模组及电子设备。
背景技术:
2.摄像机镜头是手机、平板电脑等电子设备的一个重要部件,用于拍照或者摄影,其拍摄质量的优劣直接影响客户的使用体验。随着科技的发展以及消费者对摄像机拍照和摄像功能的要求不断提高,具有光学防抖、自动对焦功能的摄像头在终端设备上得到广泛应用。
3.上述光学防抖或自动对焦的功能一般是利用驱动模块驱动光学组件发生定向平移或旋转运动,改变光学组件与光学图像传感器之间的距离或角度,从而取得最佳拍照或摄像效果。其中的驱动模块一般可以选择音圈马达、记忆合金马达、压电马达。由于压电马达技术具有结构小、推力大、设计灵活、自锁紧、步进精度高、低电磁辐射等优点,因此压电马达成为目前最为常用的驱动结构,而且,还被应用到更多领域中。
4.但是,目前的压电马达驱动模块仅能实现驱动光学组件平移运动,无法实现双自由度运动。
技术实现要素:
5.本技术提供了一种驱动模块、摄像模组及电子设备,用于驱动被驱动件(例如摄像模组中的光学元件)实现双自由度、非同时的移轴运动,以取得更好的防抖效果。
6.第一方面,本技术提供了一种驱动模块,该驱动模块可以应用于摄像模组,具体可以用于驱动摄像模组中的光学元件移动;该驱动模块包括第一支架、第二支架、固定基座以及两个压电驱动马达,此处的第二支架即用于安装被驱动件(例如摄像模组中的光学元件);第一支架可相对固定基座绕第一方向旋转,第二支架可相对第一支架绕第二方向旋转,第一方向垂直于第二方向;其中,两个压电驱动马达可以具体为第一压电驱动马达和第二压电驱动马达,第一支架由第一压电驱动马达驱动,第二支架则由第二压电驱动马达驱动,第一压电驱动马达和第二压电驱动马达具有同样的结构;具体地,第一压电驱动马达固定于固定基座、动力输出端驱动连接第一支架,对应地,第二压电驱动马达则固定于第一支架、动力输出端驱动连接第二支架;通过第一压电驱动马达和第二压电驱动马达可以分别控制第一支架和第二支架运动,从而可以驱动被驱动件实现双自由度、非同时的移轴运动。
7.将该驱动模块应用到摄像模组中,整个驱动模块可以使得摄像模组的光学元件具有双自由度运动模式,通过控制第一压电驱动马达和第二压电驱动马达协同作业,可以使得光学元件具有多种运动的可能,进而可以取得更好的防抖效果。
8.上述第一压电驱动马达和第二压电驱动马达具有同样的结构,对于任一个压电驱动马达,其包括底座、舵轴、从动轴以及两组压电驱动组件;两组压电驱动组件固定于底座,且两组压电驱动组件夹持固定舵轴以驱动舵轴摆动,从动轴与舵轴连接,且从动轴的轴心线穿过舵轴的摆动中心;对于第一压电驱动马达,其用于驱动第一支架,因此其从动轴与第
一支架连接,两组压电驱动组件配合驱动舵轴摆动,进而驱动从动轴旋转,以带动第一支架相对固定基座旋转;对于第二压电驱动马达,其用于驱动第二支架,因此其从动轴与第二支架连接,两组压电驱动组件配合驱动舵轴摆动,进而驱动从动轴旋转,以带动第二支架相对第一支架旋转。
9.其中,每组压电驱动组件包括柔性铰链结构和压电堆;在任意一组压电驱动组件中,柔性铰链结构具有抵接部以及与抵接部对应的悬臂部,悬臂部用于对接舵轴;压电堆固定于底座,且压电堆与抵接部抵接。当压电堆工作输出动力,抵接部发生结构变形,抵接部的变形带动悬臂部移动,悬臂部带动舵轴摆动。在工作中,控制两组压电驱动组件中压电堆的工作参数,即可驱动舵轴按照设定的方向摆动设定的角度。
10.一种可能实现的方式中,每组压电驱动组件还可以包括预压弹片,预压弹片可以为压电堆提供预紧力;在任意一组压电驱动组件中,预压弹片设置于压电堆与底座之间。
11.一种可能实现的方式中,两组压电驱动组件中的柔性铰链结构具有一体式结构,有利于简化工艺。
12.为了精确控制驱动模块的驱动模式,该驱动模块还设置有用于检测第一支架相对固定基座旋转角度的第一检测组件,以及用于检测第二支架相对第一支架旋转角度的第二检测组件。在工作过程中,通过第一检测组件和第二检测组件反馈的检测信息控制第一压电驱动马达和第二压电驱动马达的工作参数调整,可以取得更好更稳定的驱动模式。
13.一种可能实现的方式中,第一检测组件包括第一传感器和第一检测磁石,其中,第一传感器安装于固定基座,第一检测磁石安装于第一支架,当第一支架相对固定基座旋转,第一检测磁石随第一支架旋转,第一传感器可以感应到第一检测磁石的位置变化,从而得到第一支架相对固定基座的旋转角度变化。
14.对应地,第二检测组件包括第二传感器和第二检测磁石,其中,第二传感器安装于第一支架,第二检测磁石安装于第二支架,当第二支架相对第一支架旋转,第二检测磁石随第二支架旋转,第二传感器可以感应到第二检测磁石的位置变化,从而得到第二支架相对第一支架的旋转角度变化。
15.第二方面,本技术还提供一种摄像模组,该摄像模组可以包括光学元件以及上述任一种驱动模块,将光学元件安装于驱动模块的第二支架上,可以驱动光学元件实现双自由度、非同步的移轴运动,为光学元件的运动提供了更多的可能,可以取得更好的防抖效果,进而提高摄像效果。
16.第三方面,本技术还提供一种电子设备,该电子设备的设备本体设置有上述摄像模组,具有拍照摄像的功能,由于摄像模组具有较好的拍摄效果,可以为消费者带来更好的使用体验。
附图说明
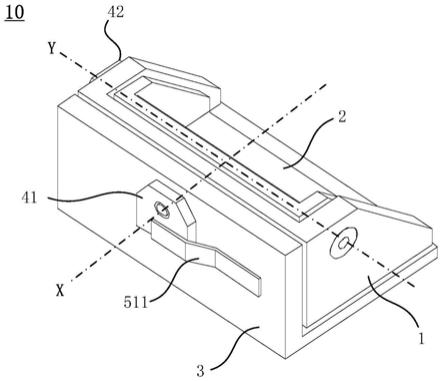
17.图1为本技术实施例提供的一种驱动模块的结构示意图;
18.图2为本技术实施例提供的一种驱动模块的爆炸图;
19.图3为本技术实施例提供的一种驱动模块应用状态示意图;
20.图4为本技术实施例提供的一种驱动模块应用时的控制原理示意图;
21.图5为本技术实施例提供的另一种驱动模块的结构示意图;
22.图6为本技术实施例提供的另一种驱动模块的爆炸图;
23.图7为本技术实施例提供的另一种驱动模块应用状态示意图;
24.图8为本技术实施例提供的一种驱动模块中第一压电驱动马达的结构示意图;
25.图9为本技术实施例提供的一种驱动模块中第一压电驱动马达的爆炸图;
26.图10为本技术实施例提供的一种驱动模块中第一压电驱动马达的工作原理示意图;
27.图11为本技术实施例提供的一种摄像模组的结构示意图。
28.附图标记:100-摄像模组;10-驱动模块;1-第一支架;11-第一基板;12-第一侧板;2-第二支架;21-第二基板;22-第二侧板;23-固定板;3-固定基座;31-底板;32-安装板;33-固定侧板;41-第一压电驱动马达;411-第一定子;412-第一动力输出轴;412
’-
第一辅助动力输出轴;42-第二压电驱动马达;421-第二定子;422-第二动力输出轴;422
’-
第二辅助动力输出轴;401-底座;402-舵轴;403-压电驱动组件;404-预压弹片;405-从动轴;4031-柔性铰链结构;4032-压电堆;51-第一检测组件;511-第一传感器;512-第一检测磁石;52-第二检测组件;521-第二传感器;522-第二检测磁石;61-第一轴承;61
’-
第一辅助轴承;62-第二轴承;62
’-
第二辅助轴承;7-被驱动件;8-控制单元;9-光学镜片。
具体实施方式
29.首先介绍一下本技术的应用场景,驱动模块是摄像模组中的重要结构,主要用于驱动摄像模组中的光学组件移动,以实现光学防抖、自动对焦等功能,从而满足拍照或摄像对画质的要求。目前摄像模组中用于驱动光学组件运动的驱动模块仅能实现驱动光学组件平移运动,无法实现驱动光学组件双自由度或多自由度的移轴运动。基于此,本技术实施例提供一种驱动模块,用于实现驱动光学组件实现双自由度、非同时的移轴运动。
30.为了使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术作进一步地详细描述。以下实施例中所使用的术语只是为了描述特定实施例的目的,而并非旨在作为对本技术的限制。如在本技术的说明书和所附权利要求书中所使用的那样,单数表达形式“一个”、“一种”、“所述”、“上述”、“该”和“这一”旨在也包括例如“一个或多个”这种表达形式,除非其上下文中明确地有相反指示。
31.在本说明书中描述的参考“一个实施例”或“一些实施例”等意味着在本技术的一个或多个实施例中包括结合该实施例描述的特定特征、结构或特点。由此,在本说明书中的不同之处出现的语句“在一个实施例中”、“在一些实施例中”、“在其他一些实施例中”、“在另外一些实施例中”等不是必然都参考相同的实施例,而是意味着“一个或多个但不是所有的实施例”,除非是以其他方式另外特别强调。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。
32.本技术实施例提供的驱动模块10的结构请参照图1所示,该驱动模块10包括第一支架1、第二支架2、固定基座3以及两个压电驱动马达(即第一压电驱动马达41和第二压电驱动马达42);在安装时,第一压电驱动马达41固定于固定基座3,且第一压电驱动马达41的动力输出端驱动连接第一支架1,此处第一压电驱动马达41的动力输出端沿图1所示第一方向(即x方向)延伸,因此第一压电驱动马达41可以驱动第一支架1相对固定基座3绕x方向旋转;第二压电驱动马达42则固定于第一支架1,且第二压电驱动马达42的动力输出端驱动连
接第二支架2,此处,第二压电驱动马达42的动力输出端沿图1所示第二方向(即y方向)延伸,因此,第二压电驱动马达42可以驱动第二支架2相对第一支架1绕y方向旋转,y方向垂直于x方向。
33.为了精确控制被驱动件的运动状态,该驱动模块10还包括用于检测第一支架1相对固定基座3旋转角度的第一检测组件51以及用于检测第二支架2相对第一支架1旋转角度的第二检测组件52,但是由于结构遮挡,图1中仅示出了第一检测组件51中的第一传感器511,为了完整体现驱动模块10中各个零件的结构,可以参照图2所示的驱动模块10的爆炸图。
34.如图2所示,固定基座3由底板31和垂直固定于底板31的安装板32组成,底板31与安装板32组成用于容纳第一支架1的空间;第一压电驱动马达41包括第一定子411以及第一动力输出轴412,第一定子411固定于固定基座3上,第一动力输出轴412即第一压电驱动马达41的动力输出端,第一动力输出轴412的轴心线与上述x方向平行;在安装时,第一定子411固定于固定基座3的安装板32上,第一动力输出轴412穿过安装板32与第一支架1传动连接;固定基座3上还设置有与第一动力输出轴412匹配的第一轴承61,可以提高第一动力输出轴412的旋转稳定性。当第一压电驱动马达41启动,第一动力输出轴412可以带动第一支架1相对固定基座3绕x方向旋转。
35.第一支架1则包括第一基板11以及对称设置于第一基板11两侧的两个第一侧板12,第一基板11平行于固定基座3的安装板32,两个第一侧板12垂直于第一基板11,两个第一侧板12与第一基板11之间形成用于安装第二支架2的空间;第二压电驱动马达42包括第二定子421和第二动力输出轴422,第二定子421用于固定于第一支架1,第二动力输出轴422即第二压电驱动马达42的动力输出端,第二动力输出轴422的轴心线与上述y方向平行;在安装时,第二定子421固定于第一支架1的其中一个第一侧板12上,第二动力输出轴422穿过该第一侧板12与第二支架2传动连接;第一支架1上还设置有与第二动力输出轴422匹配的第二轴承62,可以提高第二动力输出轴422的旋转稳定性。当第二压电驱动马达42启动,第二动力输出轴422可以带动第二支架2相对第一支架1绕y方向旋转。如图2所示,基于第一支架1中第一基板11和两个第一侧板12设置的结构,为了提高第二支架2运动的稳定性,可以在未固定第二定子421的第一侧板12上设置与第二动力输出轴422共线的第二辅助动力输出轴422’,第二辅助动力输出轴422’与第二支架2枢接,并且,在该第一侧板12上还设置有与该第二辅助动力输出轴422’匹配的第二辅助轴承62’。
36.而用于检测第一支架1相对固定基座3旋转角度的第一检测组件51,包括第一传感器511和第一检测磁石512,第一传感器511安装于固定基座3,第一检测磁石512则安装于第一支架1,第一传感器511与第一检测磁石512之间能够产生电磁感应,当第一检测磁石512随第一支架1相对固定基座3旋转,第一传感器511可以通过电磁感应变化得到第一支架1相对固定基座3旋转的角度。
37.请继续参照图2,第二支架2则包括第二基板21、固定板23以及对称设置于第二基板21两侧的两个第二侧板22,第二基板21与固定板23相互垂直,两个第二侧板22分别垂直于第二基板21、固定板23,第二基板21、固定板23以及两个第二侧板22形成用于安装被驱动件的空间;第二压电驱动马达42包括第二定子421和第二动力输出轴422,第二定子421用于固定于第一支架1,第二动力输出轴422即第二压电驱动马达42的动力输出端,第二传动轴
422的轴心线与上述y方向平行;在安装时,第二定子421固定于第一支架1的其中一个第一侧板12上,第二动力输出轴422穿过该第一侧板12与第二支架2传动连接;第一支架1上还设置有与第二动力输出轴422匹配的第二轴承62,可以提高第二动力输出轴422的旋转稳定性。当第二压电驱动马达42启动,第二传动轴422可以带动第二支架2相对第一支架1绕y方向旋转。如图2所示,基于第一支架1中第一基板11和两个第一侧板12设置的结构,为了提高第二支架2运动的稳定性,可以在未固定第二定子421的第一侧板12上设置于第二动力输出轴422共轴心线的第二辅助动力输出轴422’,第二辅助动力输出轴422’与第二支架2枢接,并且,在该第一侧板12上还设置有与该第二辅助动力输出轴422’匹配的第二辅助轴承62’。
38.而用于检测第二支架2相对第一支架1旋转角度的第二检测组件52,包括第二传感器521和第二检测磁石522,第二传感器521安装于第一支架1,第二检测磁石522则安装于第二支架2,第二传感器521与第二检测磁石522之间能够产生电磁感应,当第二检测磁石522随第二支架2相对第一支架1旋转,第二传感器521可以通过电磁感应变化得到第二支架2相对第一支架1旋转的角度。
39.根据上述实施例说明,第一支架1的旋转方向垂直于x方向,第二支架2的旋转方向垂直于y方向;如图3所示,可以该驱动模块10应用于驱动其他被驱动件7,第二支架2安装于第一支架1,当第一压电驱动马达41(此处未示出)工作,第一支架1随第一压电驱动马达41的第一动力输出轴412旋转,带动第二支架2、被驱动件7一起绕第一动力输出轴412轴心线的方向(即平行于x的方向)的方向旋转;被驱动件7安装于第二支架2,当第二压电驱动马达42工作,第二支架2随第二压电驱动马达42的第二动力输出轴422旋转,带动被驱动件7一起绕第二动力输出轴422轴心线的方向(即平行于y的方向)的方向旋转。整个驱动模块10可以使得被驱动件7具有双自由度运动模式。
40.在驱动模块10的实际应用中,例如将该驱动模块10应用到摄像模组中,如图4所示,摄像模组具有控制单元8,该控制单元8可以控制两个压电驱动马达,第一传感器511可以将检测得到的第一支架1相对固定基座3旋转的角度反馈到控制单元8,第二传感器521可以将检测得到的第二支架2相对第一支架1旋转的角度反馈到控制单元8,控制单元8根据被驱动件7的运动需要控制第一压电驱动马达41驱动第一支架1相对固定基座3沿垂直于x方向旋转、控制第二压电驱动马达42驱动第二支架2相对第一支架1沿垂直于y方向旋转,在第一支架1相对固定基座3旋转时,第一传感器511可以配合第一检测磁石512检测第一支架1相对固定基座3的旋转度数,在第二支架2相对第一支架1旋转时,第二传感器521可以配合第二检测磁石522检测第二支架2相对第一支架1的旋转度数。因此,第一检测组件51和第二检测组件52配合可以精确监控第一支架1和第二支架2的运动状态,方便控制单元8对第一压电驱动马达41和第二压电驱动马达42进行精确控制,摄像模组可以取得更好更稳定的拍摄效果。
41.可以理解的是,图1至图3中示出的固定基座3和第一支架1之间具有间隙,该间隙能够允许第一支架1绕第一动力输出轴412相对固定基座3的旋转;相应地,第一支架1和第二支架2之间也具有间隙,该间隙能够允许第二支架2绕第二动力输出轴422相对固定基座3的旋转。
42.与图1至图3所示的驱动模块10结构类似,本技术实施例还提供一种如图5和图6所示的驱动模块10,该驱动模块10包括第一支架1、第二支架2、固定基座3以及两个压电驱动
马达(即第一压电驱动马达41和第二压电驱动马达42),此处未示出第一检测组件51和第二检测组件52;图5示出了该驱动模块10的爆炸结构图,第一支架1的结构与图2中第一支架1的结构类似,第二支架2的结构与图2中第二支架2的结构类似,不同点在于,此处的固定基座3包括底板31以及两个垂直于底板31的固定侧板33,第一压电驱动马达41的第一定子411固定于其中一个固定侧板33,第一动力输出轴412穿过该固定侧板33与第一支架1连接,第一动力输出轴412的轴心线与y方向平行;该固定侧板33上还设置有与第一动力输出轴412匹配的第一轴承61,可以提高第一动力输出轴412的旋转稳定性。基于固定基座3中底板31与两个固定侧板33设置的结构,为了提高第一支架1运动的稳定性,可以在未固定第一定子411的固定侧板33上设置与第一动力输出轴412共线的第一辅助动力输出轴412’,第一辅助动力输出轴412’与第一支架1枢接,并且,在该固定侧板33上还设置有与该第一辅助动力输出轴412’匹配的第一辅助轴承61’;第一支架1的第一基板11平行于第一动力输出轴412的轴心线方向,两个第一侧板12分别对应于固定基座3的两个固定侧板33,其中一个第一侧板12与第一动力输出轴412连接,另一个第一侧板12与第一辅助动力输出轴412’枢接,使得第一支架1可以随第一动力输出轴412相对固定基座3沿垂直于y方向旋转;第二压电驱动马达42的第二定子421固定于第一支架1的第一基板11,第二动力输出轴422穿过第一基板11与第二支架2连接,在第一基板11上设置有用于匹配第二动力输出轴422的第二轴承62;第二支架2的第二基板21与第二动力输出轴422连接,使得第二支架2可以随第二动力输出轴422沿垂直于x方向旋转。
43.当然,这种驱动模块10也可以用于驱动被驱动件7,如图7所示,第二支架2安装于第一支架1,当第一压电驱动马达41(此处未示出)工作,第一支架1随第一压电驱动马达41的第一动力输出轴412沿垂直于y方向旋转,带动第二支架2、被驱动件7一起绕第一动力输出轴412轴心线的方向(即平行于y的方向)的旋转;被驱动件7安装于第二支架2,当第二压电驱动马达42工作,第二支架2随第二压电驱动马达42的第二动力输出轴422旋转,带动被驱动件7一起绕第二动力输出轴422轴心线的方向(即平行于x的方向)的旋转,整个驱动模块10可以使得被驱动件7具有双自由度、非同时的移轴运动模式。
44.一种可能实现的方式中,第一压电驱动马达41和第二压电驱动马达42具有相同的结构,且均以压电驱动为动力。以第一压电驱动马达41为例,如图8所示的第一压电驱动马达41的结构以及图9所示的第一压电驱动马达41的爆炸图,该第一压电驱动马达41包括底座401、舵轴402、从动轴405以及两组压电驱动组件403,此处的底座401相当于第一压电驱动马达41中的第一定子411,即底座401固定于固定基座3;而从动轴405相当于第一压电驱动马达41中的第一动力输出轴412,在使用时驱动连接第一支架1;两组所述压电驱动组件403分设于舵轴402的两侧,每组压电驱动组件403的一端固定于底座401,另一端抵接舵轴402使得两组压电驱动组件403可以如图7所示夹持固定舵轴402,控制两组压电驱动组件403可以驱动舵轴402摆动,舵轴402摆动,带动从动轴405旋转,从而带动第一支架1相对固定基座3旋转。
45.请继续参照图8和图9,每组压电驱动组件403包括柔性铰链结构4031和压电堆4032,两组压电驱动组件403中的两个柔性铰链结构4031可以具有一体式结构。以图8所示右侧的压电驱动组件403为例,压电堆4032的一端固定于底座401,且压电堆4032与底座401之间设置有预压弹片404,预压弹片404可以为压电堆4032提供预紧力;柔性铰链结构4031
具有抵接部a以及与抵接部a对应的悬臂部b,图8中的抵接部a具有镂空结构,在受力时会发生变形,其变形可以改变悬臂部b的位置;对应到图8中的两组压电驱动组件403,两个柔性铰链结构4031的两个悬臂部b夹持固定上述舵轴402(具体可以将舵轴402胶粘固定于两个悬臂部b之间),根据需要启动两组压电驱动组件403中的压电堆4032,可以驱动舵轴402按照设定的方向摆动设定的角度。应当理解的是,图8中的柔性铰链结构4031的结构仅做示例,其结构还可以有其他的实现方式,只要能够取得在压电堆4032的驱动下产生变形以带动舵轴402摆动的效果即可,此处不再以图示说明。
46.在具体使用时,图8所示的第一压电驱动马达41中的舵轴402与从动轴405连接,从动轴405则与第一支架1驱动连接。结合图8,可以看出,在从动轴405上设置有用于匹配舵轴402的插孔c,在配合安装时,舵轴402插入该插孔c内,当舵轴402被驱动摆动,可以驱动第一动力输出轴412旋转;需要说明的是,此处舵轴402的摆动中心需要位于从动轴405的轴心线上,从而舵轴402的摆动可以驱动从动轴405绕从动轴405的轴心线旋转。
47.举例说明,请参照图10,以右边的压电驱动组件403为例,设定压电堆4032启动对柔性铰链结构4031施加如a所示方向力,柔性铰链结构4031的抵接部a产生向下压缩的形变,悬臂部b在抵接部a的形变过程中产生如b所示方向的摆动,从而带动舵轴402产生如c所示方向的摆动,舵轴402的摆动带动从动轴405如图10所示方向旋转;控制压电堆4032的工作参数,可以控制舵轴402的摆动角度。在此过程中,左边的压电驱动组件403未启动。可以理解的是,当驱动左边的压电驱动组件403,而右边的压电驱动组件403未启动,可以驱动舵轴402产生与图10中所示c方向相反的摆动,此处不再以图例示出。可以看出,在工作过程中,只要精确控制两个压电堆4032的工作参数,即可控制舵轴402产生要求方向与角度的摆动,进而带动从动轴405沿要求方向旋转设定的角度。
48.可以理解的是,图8至图10以第一压电驱动马达41为例对本技术实施例所提供的驱动模块10中的压电驱动马达进行介绍,第二压电驱动马达42的结构与第一压电驱动马达41的结构相同,只不过在使用时,舵轴402与第二压电驱动马达42的第二动力输出轴422连接,以驱动第二动力输出轴422按照需求的方向与角度旋转,此处不再展开描述。
49.基于上述实施例提供的驱动模块10,本技术实施例还提供一种摄像模组100,如图11所示,包括光学元件以及上述任一种驱动模块10,此处的光学元件可以为光学镜片9,以图1所示的驱动模块10为例,该光学镜片9安装于驱动模块10中的第二支架2;第一压电驱动马达41和第二压电驱动马达42协作可以驱动第二支架2做双自由度旋转,进而可以带动光学镜片9实现双自由度、非同时的移轴运动,为光学镜片9的运动提供更多的可能;在此过程中,第一检测组件51和第二检测组件52(由于视角所限,图11中仅示出了第一检测组件51中的第一传感器511)可以分别对第一支架1和第二支架2的运动进行检测,对第一压电驱动马达41和第二压电驱动马达42进行精确控制,可以控制防抖,以取得稳定图像的效果。
50.此外,本技术实施例还提供一种电子设备,该电子设备具有上述摄像模组100,可以进行拍照摄影(该电子设备可以是手机、平板电脑、智能手表等,此处不再以图例示出);该电子设备在进行拍照摄影时,光学器件可以实现双自由度、非同时的移轴运动,且防抖效果更好,拍摄得到的图像更稳定更清晰,可以为消费者带来更好的使用体验。
51.以上,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在
本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。