1.本发明涉及光学显微成像技术应用领域,尤其涉及的是一种基于自适应光学的多焦点结构光超分辨成像方法及系统。
背景技术:
2.光学显微成像技术已经成为研究生物微观结构的重要工具。2010年muller&enderlein首次实现了图像扫描显微技术[muller,et al.,“image scanning microscopy”,phy.rew.let.,198101-198014(2010)],可实现约2倍横向分辨率的提升,也称为结构光超分辨成像技术。2012年,多焦点结构光超分辨成像技术被提出,该技术采用多点并行扫描的方式,极大地提高了结构光超分辨显微镜的成像速度,为研究活体样本内部的生物结构、信息转导以及疾病诊疗提供了一个有利工具。
[0003]
在对生物样品进行显微成像时,像差对成像结果的影响非常明显。对于实际的成像系统,其像差主要来源于三个方面:其一是系统固有的像差;其二是物镜浸润介质与样品折射率不匹配导致的像差;其三是样品内部折射率不均匀导致的像差。像差会导致聚焦光斑变得弥散。具体表现为:激发光斑变得弥散导致样品激发效率降低。样品发射的荧光光斑变得弥散导致样品成像变得模糊。在对样品进行大深度成像时,像差对成像深度和成像分辨率的影响尤其明显。
[0004]
因此,现有技术还有待改进。
技术实现要素:
[0005]
本发明要解决的技术问题在于,针对现有技术缺陷,本发明提供一种基于自适应光学的多焦点结构光超分辨成像方法及系统,以解决现有的多焦点结构光超分辨成像技术像差大的技术问题。
[0006]
本发明解决技术问题所采用的技术方案如下:
[0007]
第一方面,本发明提供一种基于自适应光学的多焦点结构光超分辨成像方法,包括以下步骤:
[0008]
通过激光器产生激光,并将所述激光经过扩束准直后照射在空间光调制器上;
[0009]
通过所述空间光调制器对所述激光进行调制,并将调制后的激光传输至样品表面,以在所述样品表面形成单个激发点;
[0010]
将所述单个激发点产生的单光子或多光子荧光波前信息传输至哈特曼传感器;
[0011]
根据所述哈特曼传感器探测的波前像差,控制所述空间光调制器预加载对应的校正相位图,并控制变形镜加载对应的校正电压矩阵;
[0012]
控制所述空间光调制器连续加载生成的多焦点激发点阵相位图,并通过探测器依次接收自适应光学校正后的样品荧光信息,直至多焦点激发光阵列扫描完成。
[0013]
在一种实现方式中,所述通过激光器产生激光,并将所述激光经过扩束准直后照射在空间光调制器上,包括:
[0014]
通过所述激光器产生预设波长的激光;
[0015]
通过第一透镜组对所述激光进行扩束准直,得到预设半径的激光束;
[0016]
通过第一反射镜将所述激光束照射在所述空间光调制器上。
[0017]
在一种实现方式中,所述通过空间光调制器对所述激光进行调制,并将调制后的激光传输至样品表面,包括:
[0018]
根据相位调制参数对照射在所述空间光调制器上的激光进行相位调制,以在所述空间光调制器之后的第一个透镜的傅里叶面处形成调制后的激发光斑;
[0019]
通过光阑过滤所述激发光斑中的多余衍射级,得到目标激发光斑;
[0020]
通过第二透镜组和物镜将所述目标激发光斑投射到所述样品表面。
[0021]
在一种实现方式中,所述将单个激发点产生的单光子或多光子荧光波前信息传输至哈特曼传感器,包括:
[0022]
将变形镜设置为平面状态;
[0023]
通过所述空间光调制器加载所述单个激发点的相位图;
[0024]
将所述单个激发点产生的单光子或多光子荧光波前信息传输至所述哈特曼传感器,并通过所述哈特曼传感器采集所述荧光波前信息。
[0025]
在一种实现方式中,所述根据哈特曼传感器探测的波前像差,控制所述空间光调制器预加载对应的校正相位图,并控制变形镜加载对应的校正电压矩阵,包括:
[0026]
根据采集到的荧光波前信息计算所述波前像差;
[0027]
根据所述波前像差计算激光光路的像差校正相位图;
[0028]
将所述哈特曼传感器与变形镜组成闭环校正,并通过迭代计算,得到所述变形镜的校正面型的电压分布矩阵;
[0029]
根据所述电压分布矩阵对荧光光路进行自适应光学校正,得到校正后的波前像差。
[0030]
在一种实现方式中,所述根据波前像差计算激光光路的像差校正相位图,包括:
[0031]
计算所述波前像差中的pv面型,并对所述pv面型进行插值处理,得到pv坐标值;
[0032]
根据所述pv坐标值和预设公式计算所述像差校正相位图。
[0033]
在一种实现方式中,所述预设公式为:
[0034]
mod(k*pv(x1,y1)/λ,2π);
[0035]
λ表示探测波前的波长;
[0036]
k表示响应因子。
[0037]
在一种实现方式中,所述将哈特曼传感器与变形镜组成闭环校正,并通过迭代计算,得到所述变形镜的校正面型的电压分布矩阵,包括:
[0038]
根据预设电压依次调节所述变形镜的制动器的电压值,并判断检测的波前像差是否趋于预设值;
[0039]
若检测的波前像差趋于预设值,则将所述变形镜的制动器的当前电压值设置为所述变形镜的校正面型的电压分布矩阵。
[0040]
在一种实现方式中,所述控制空间光调制器连续加载生成的多焦点激发点阵相位图,并通过探测器依次接收自适应光学校正后的样品荧光信息,包括:
[0041]
控制所述变形镜加载所述校正面型;
[0042]
控制所述空间光调制器加载所述像差校正相位图;
[0043]
依次加载生成的多焦点激发点阵相位图,以对样品进行扫描;
[0044]
通过相机依次采集对应的多焦点点阵激发样品生成的荧光图像,得到多焦点结构光超分辨成像。
[0045]
第二方面,本发明提供一种基于自适应光学的多焦点结构光超分辨成像系统,包括:照明装置、自适应光学校正装置、荧光探测成像装置以及终端;所述照明装置、所述自适应光学校正装置以及所述荧光探测成像装置分别与所述终端连接;
[0046]
所述照明装置包括:激光器以及空间光调制器;所述空间光调制器用于对所述激光器发射的入射激光进行调制,生成单点激发光、多焦点点阵激发光以及经过所述自适应光学校正装置校正后的多焦点点阵激发光;
[0047]
所述自适应光学校正装置包括:哈特曼传感器以及变形镜;所述哈特曼传感器用于探测波前信息,所述变形镜用于校正成像时系统像差以及样品像差对成像造成的图像差值;
[0048]
所述荧光探测成像装置包括:相机;所述相机用于探测样本发出的荧光信号;
[0049]
所述终端用于控制所述激光器产生激光,并控制所述空间光调制器对所述激光进行调制;
[0050]
以及用于根据所述哈特曼传感器探测的波前像差,控制所述空间光调制器预加载对应的校正相位图,并控制变形镜加载对应的校正电压矩阵;
[0051]
以及用于控制所述空间光调制器连续加载生成的多焦点激发点阵相位图,并通过所述探测器依次接收自适应光学校正后的样品荧光信息,直至多焦点激发光阵列扫描完成,实现多焦点结构光超分辨成像。
[0052]
本发明采用上述技术方案具有以下效果:
[0053]
本发明利用空间光调制器的调制精度高和变形镜的能量利用率高的特点,在激光激发光路中使用空间光调制器实现激光光路的自适应光学校正,进一步提升了成像深度;并且,在荧光光路中使用变形镜实现荧光光路的自适应光学校正,在提升成像分辨率的同时减少了荧光能量损失。相比于现有的成像方式,本发明在不采用振镜扫描的情况下,通过结构简单且操作简便的装置,仅需空间光调制器就可以实现点阵生成、扫描以及校正,从而提升了多焦点结构光超分辨成像的深度和分辨率,并自适应光学校正消除了系统像差和大深度成像时样本像差对成像深度和成像分辨率的影响。
附图说明
[0054]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
[0055]
图1是本发明的一种实现方式中基于自适应光学的多焦点结构光超分辨成像方法的流程图。
[0056]
图2是本发明的一种实现方式中测量波前信息时空间光调制器加载的相位图。
[0057]
图3是本发明的一种实现方式中空间光调制器加载相位图时生成的单点激发光斑
示意图。
[0058]
图4是本发明的一种实现方式中变形镜为平面状态时的电压分布矩阵示意图。
[0059]
图5是本发明的一种实现方式中测量波前信息时哈特曼传感器探测到的波前像差示意图。
[0060]
图6是本发明的一种实现方式中自适应光学校正时空间光调制器加载的像差校正相位图和生成的多焦点点阵的相位图。
[0061]
图7是本发明的一种实现方式中经过光学校正后的多焦点点阵示意图。
[0062]
图8是本发明的一种实现方式中变形镜加载像差校正面型的电压分布矩阵示意图。
[0063]
图9是本发明的一种实现方式中经过自适应光学校正后的样本成像示意图。
[0064]
图10是本发明的一种实现方式中基于自适应光学的多焦点结构光超分辨成像装置的结构示意图。
[0065]
图中:1、激光器;2、半波片;3、第一透镜;4、第二透镜;5、第一反射镜;6、空间光调制器;7、第三透镜;8、第二反射镜;9、光阑;10、二相色镜;11、第四透镜;12、第三反射镜;13、物镜;14、样品;15、第五透镜;16、变形镜;17、第六透镜;18、第七透镜;19、哈特曼传感器;20、可翻转反射镜;21、探测器;22、电脑。
[0066]
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0067]
为使本发明的目的、技术方案及优点更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0068]
示例性方法
[0069]
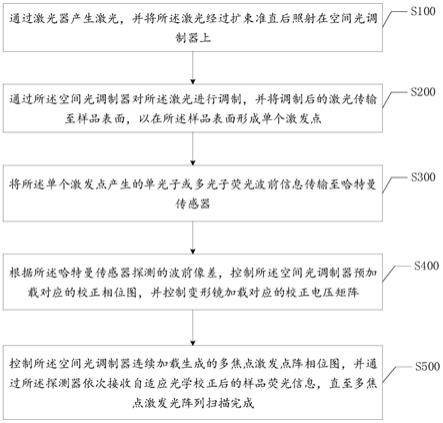
如图1所示,本发明实施例提供一种基于自适应光学的多焦点结构光超分辨成像方法,包括以下步骤:
[0070]
步骤s100,通过激光器产生激光,并将所述激光经过扩束准直后照射在空间光调制器上。
[0071]
在本实施例中,所述基于自适应光学的多焦点结构光超分辨成像方法通过基于自适应光学的多焦点结构光超分辨成像系统实现;该系统充分利用了空间光调制器调制精度高和变形镜能量利用率高的特点。在激光激发光路中使用空间光调制器实现激光激发光路的自适应光学校正,进一步提升成像深度;在荧光光路中使用变形镜实现荧光光路的自适应光学校正,在提升成像分辨率的同时减少荧光能量损失。
[0072]
如图10所示,所述基于自适应光学的多焦点结构光超分辨成像系统包括:激光器、半波片、第一透镜、第二透镜、第一反射镜、空间光调制器、第三透镜、第二反射镜、光阑、二相色镜、第四透镜、第三反射镜、物镜、样品、第五透镜、变形镜、第六透镜、第七透镜、哈特曼传感器、可翻转反射镜、探测器以及电脑等。
[0073]
在所述系统中,所述激光器、所述空间光调制器、所述变形镜、所述哈特曼传感器以及所述探测器分别与所述电脑连接,以向所述电脑传输对应的探测数据,或在所述电脑的控制下实现激光激发光路的自适应光学校正和实现荧光光路的自适应光学校正。
[0074]
在实施所述基于自适应光学的多焦点结构光超分辨成像方法时,通过所述电脑控制所述激光器发射预设波长的激光;其中,所述预设波长的激光可以是波长为920nm的飞秒激光,用于多光子成像,可以是波长为640nm的激光用于单光子成像,也可以是其他波长的激光;由于,所述激光器发射的激光尺寸为指定半径,因此,需要对所述激光器发射的激光进行扩束准直处理,以得到预设半径的激光束;例如,预设半径为2mm。
[0075]
具体地,如图10所示,在对所述激光器的激光进行扩束准直时,可通过所述第一透镜和所述第二透镜进行扩束准直,得到需要的激光尺寸;进而,通过固定的第一反射镜将扩束准直后的激光束照射在所述空间光调制器上,以通过所述空间光调制器对扩束准直后的激光进行相位调制。
[0076]
即在本实施例的一种实现方式中,步骤s100具体包括以下步骤:
[0077]
步骤s110,通过所述激光器产生预设波长的激光;
[0078]
步骤s120,通过第一透镜组对所述激光进行扩束准直,得到预设半径的激光束;
[0079]
步骤s130,通过第一反射镜将所述激光束照射在所述空间光调制器上。
[0080]
本实施例通过将激光器发射的激光照射在空间光调制器上,可利用空间光调制器对激光进行调制,从而在不采用振镜扫描的情况下,实现激光器及激光光路的调制过程。
[0081]
如图1所示,在本发明实施例的一种实现方式中,基于自适应光学的多焦点结构光超分辨成像方法还包括以下步骤:
[0082]
步骤s200,通过所述空间光调制器对所述激光进行调制,并将调制后的激光传输至样品表面,以在所述样品表面形成单个激发点。
[0083]
在本实施例中,入射激光照射在所述空间光调制器上后,所述电脑根据相位调制参数对照射在所述空间光调制器上的激光进行相位调制,以在所述空间光调制器之后的第一个透镜(即图10中的第三透镜)的傅里叶面处形成调制后的激发光斑。
[0084]
进一步地,调制后的激发光斑经过第二反射镜的反射,进入光阑处;通过所述光阑可以过滤所述激发光斑中的多余衍射级,从而得到目标激发光斑;进而,经过所述目标激发光斑经过第二透镜组和物镜投射到样品表面,即经过图10中的二相色镜、第四透镜、第三反射镜以及物镜,投射到所述样品表面。
[0085]
即在本实施例的一种实现方式中,步骤s200具体包括以下步骤:
[0086]
步骤s210,根据相位调制参数对照射在所述空间光调制器上的激光进行相位调制,以在所述空间光调制器之后的第一个透镜的傅里叶面处形成调制后的激发光斑;
[0087]
步骤s220,通过光阑过滤所述激发光斑中的多余衍射级,得到目标激发光斑;
[0088]
步骤s230,通过第二透镜组和物镜将所述目标激发光斑投射到所述样品表面。
[0089]
本实施例通过空间光调制器对入射激光进行调制,可以得到目标激发光斑,从而在样品表面形成单点激发效应,以便于后续通过哈特曼传感器探测到该单点激发样品而生成的荧光信息的波前信息。
[0090]
如图1所示,在本发明实施例的一种实现方式中,基于自适应光学的多焦点结构光超分辨成像方法还包括以下步骤:
[0091]
步骤s300,将所述单个激发点产生的荧光波前信息传输至哈特曼传感器。
[0092]
在本实施例中,所述目标激发光斑投射到所述样品表面后,样品被照射所发出的荧光经过变形镜反射后被哈特曼传感器或相机探测到,进而将探测到的荧光波前信息传输
至电脑。
[0093]
具体地,如图10所示,样品的荧光依次经过图中的物镜、第三反射镜、第四透镜、二相色镜、第五透镜、变形镜、第六透镜、可翻转反射镜以及第七透镜,传输至哈特曼传感器,从而被所述哈特曼传感器探测到。
[0094]
进一步地,为了获得样品的荧光波前信息,需要根据初始电压分布矩阵(或默认电压分布矩阵)将变形镜设置为平面状态,其中,初始电压分布矩阵如图4所示;然后,通过所述空间光调制器加载所述单个激发点的相位图,其中,所述相位图如图2所示;对应地,通过单个激发点产生的单点光斑如图3所示;最后,通过将单个激发点产生的单光子或多光子荧光波前信息传输至所述哈特曼传感器,即可采集到所述样品的荧光波前信息。
[0095]
即在本实施例的一种实现方式中,步骤s300具体包括以下步骤:
[0096]
步骤s310,将变形镜设置为平面状态;
[0097]
步骤s320,通过所述空间光调制器加载所述单个激发点的相位图;
[0098]
步骤s330,将所述单个激发点产生的单光子或多光子荧光波前信息传输至所述哈特曼传感器,并通过所述哈特曼传感器采集所述荧光波前信息。
[0099]
本实施例通过控制变形镜的状态,利用空间光调制器加载的单个激发点的相位图,可在哈特曼传感器中探测到样品的荧光波前信息,从而根据探测到的信息进行相应的光学校正。
[0100]
如图1所示,在本发明实施例的一种实现方式中,基于自适应光学的多焦点结构光超分辨成像方法还包括以下步骤:
[0101]
步骤s400,根据所述哈特曼传感器探测的波前像差,控制所述空间光调制器预加载对应的校正相位图,并控制变形镜加载对应的校正电压矩阵。
[0102]
在本实施例中,根据哈特曼传感器探测的荧光波前信息计算所述波前像差,其中,所述荧光波前信息以及所述波前像差如图5所示;具体计算方式为:根据所述哈特曼传感器中微透镜阵列的每个子孔径对应的像点与参考点(需要先确定参考点的坐标位置)的偏移量,获取每个子孔径的波前斜率;在此基础上,可以选择夏克-哈特曼波前传感器的波前重建算法(例如:区域法波前重建算法、模式波前重建算法等),即可重建得到所述波前像差;其中,所述波前重建算法为现有技术,故不赘述。
[0103]
进一步地,根据探测到的波前像差,计算激光光路的像差校正相位图,以将所述像差校正相位图作为后续所述激光光路的自适应光学校正图,其中,所述像差校正相位图如图6所示;之后,通过将所述哈特曼传感器与变形镜组成闭环校正,并通过约3秒钟的迭代计算,得到所述变形镜的校正面型的电压分布矩阵,从而实现荧光光路的自适应校正过程,得到校正后的波前像差。
[0104]
即在本实施例的一种实现方式中,步骤s400具体包括以下步骤:
[0105]
步骤s410,根据采集到的荧光波前信息计算所述波前像差;
[0106]
步骤s420,根据所述波前像差计算激光光路的像差校正相位图;
[0107]
步骤s430,将所述哈特曼传感器与变形镜组成闭环校正,并通过迭代计算,得到所述变形镜的校正面型的电压分布矩阵;
[0108]
步骤s440,根据所述电压分布矩阵对荧光光路进行自适应光学校正,得到校正后的波前像差。
[0109]
在本实施例中,在上述计算所述像差校正相位图的过程中,其计算方式具体如下:
[0110]
首先,根据上述计算得到的波前像差确定其pv(x,y)面型;然后,对该pv面型进行插值处理,得到pv坐标值(x1,y2),从而使得其面型大小与所述空间光调制器的镜面大小相匹配;最后,根据所述pv坐标值和预设公式计算所述像差校正相位图;其中,所述预设公式为:
[0111]
mod(k*pv(x1,y1)/λ,2π);
[0112]
λ表示探测波前的波长;
[0113]
k表示响应因子。
[0114]
在上述公式中,所述响应因子可通过以下方式测试得到:
[0115]
首先,在样品台放置均匀溶液;
[0116]
然后,在所述空间光调制器上加载生成单点探测的相位图和零相差相位的叠加相位图,将此时哈特曼传感器探测到的波前像差设为参考值;
[0117]
最后,将所述空间光调制器上的零相差相位替换为某一已知相差相位图p(x1,y1),在所述哈特曼传感器上探测到像差值pv(x,y)。其中,相差相位图p(x1,y1)与所述哈特曼传感器上探测到的pv(x,y)的比值即为响应因子k。
[0118]
即在本实施例的一种实现方式中,步骤s420具体包括以下步骤:
[0119]
步骤s421,计算所述波前像差中的pv面型,并对所述pv面型进行插值处理,得到pv坐标值;
[0120]
步骤s422,根据所述pv坐标值和预设公式计算所述像差校正相位图。
[0121]
在本实施例中,在上述计算所述变形镜的校正面型的电压分布矩阵的过程中,需要根据预设电压(例如,从0v开始,按照0.5v的增值改变电压值)依次改变变形镜的制动器的电压,使测量到的波前像差趋于0变化(即趋于预设值);当测量到的波前像差逐渐减小并趋于稳定时,变形镜的制动器的电压值即为变形镜校正面型的电压分布矩阵;其中,所述校正面型的电压分布矩阵如图8所示;在计算的过程中,需要依次调节所述变形镜的制动器的电压值,并实时确定波前像差趋于0变化。
[0122]
即在本实施例的一种实现方式中,步骤s430具体包括以下步骤:
[0123]
步骤s431,根据预设电压依次调节所述变形镜的制动器的电压值,并判断检测的波前像差是否趋于预设值;
[0124]
步骤s432,若检测的波前像差趋于预设值,则将所述变形镜的制动器的当前电压值设置为所述变形镜的校正面型的电压分布矩阵。
[0125]
本实施例通过波前像差计算得到计算激光激发光路的像差校正相位图,从而可以对激光激发光路进行校正,以及通过波前像差计算得到校正面型的电压分布矩阵,从而可以对荧光光路进行校正。
[0126]
如图1所示,在本发明实施例的一种实现方式中,基于自适应光学的多焦点结构光超分辨成像方法还包括以下步骤:
[0127]
步骤s500,控制所述空间光调制器连续加载生成的多焦点激发点阵相位图,并通过探测器依次接收自适应光学校正后的样品荧光信息,直至多焦点激发光阵列扫描完成。
[0128]
在本实施例中,在得到激光光路和荧光光路的校正参数后,可控制所述变形镜加载上述校正面型,即通过上述校正面型的电压分布矩阵控制所述变形镜的制动器,使得所
述变形镜由平面状态达到对应的形变,实现对荧光光路的自适应校正。
[0129]
与此同时,可所述空间光调制器加载所述像差校正相位图,之后依次加载在所述空间光调制器调制下生成的多焦点点阵的相位图,以对样品进行扫描;其中,所述多焦点点阵的相位图如图7所示。
[0130]
最后,使用相机依次采集对应的多焦点点阵激发样品生成的荧光图像,将上述获得的样品荧光图像序列进行对应像素灰度值的叠加计算,可以得到具有宽场成像分辨率的宽场荧光图像;以及,将样品荧光图像序列进行像素重定位处理和去卷积处理后,可得到约2倍分辨率提升的超分辨图像。
[0131]
即在本实施例的一种实现方式中,步骤s500具体包括以下步骤:
[0132]
步骤s510,控制所述变形镜加载所述校正面型;
[0133]
步骤s520,控制所述空间光调制器加载所述像差校正相位图;
[0134]
步骤s530,依次加载生成的多焦点激发点阵相位图,以对样品进行扫描;
[0135]
步骤s540,通过相机依次采集对应的多焦点点阵激发样品生成的荧光图像,得到多焦点结构光超分辨成像。
[0136]
值得一提的是,通过所述空间光调制器连续加载一系列的多焦点激发点阵的相位图时,可以通过所述探测器依次接收自适应光学校正后的样品荧光信息,直至多焦点激发,光阵列扫描完整个视场。经过自适应光学校正后的多焦点激发点阵如图7所示;而经过自适应光学校正后的多焦点结构光对样品(小鼠脑部血管)的成像结果如图9所示。
[0137]
本实施例利用空间光调制器的调制精度高和变形镜的能量利用率高的特点,在激光激发光路中使用空间光调制器实现激光激发光路的自适应光学校正,进一步提升了成像深度;并且,在荧光光路中使用变形镜实现荧光光路的自适应光学校正,在提升成像分辨率的同时减少了荧光能量损失。相比于现有的成像方式,本发明在不采用振镜扫描的情况下,通过结构简单且操作简便的装置,仅需空间光调制器就可以实现点阵生成、扫描以及校正,从而提升了多焦点结构光超分辨成像的深度和分辨率,并自适应光学校正消除了系统像差和大深度成像时样本像差对成像深度和成像分辨率的影响。
[0138]
示例性设备
[0139]
基于上述实施例,本发明还提供一种基于自适应光学的多焦点结构光超分辨成像装置,包括:照明装置、自适应光学校正装置、荧光探测成像装置以及终端;所述照明装置、所述自适应光学校正装置以及所述荧光探测成像装置分别与所述终端连接;
[0140]
如图10所示,所述照明装置包括:激光器1以及空间光调制器6;所述空间光调制器6用于对所述激光器1发射的入射激光进行调制,生成单点激发光、多焦点点阵激发光以及经过所述自适应光学校正装置校正后的多焦点点阵激发光;
[0141]
所述自适应光学校正装置包括:哈特曼传感器19以及变形镜16;所述哈特曼传感器19用于探测波前信息,所述变形镜16用于校正成像时系统像差以及样品像差对成像造成的图像差值;
[0142]
所述荧光探测成像装置包括:相机(即图中探测器21);所述相机用于探测样本发出的荧光信号;
[0143]
所述终端(即图中电脑22)用于控制所述激光器1产生激光,并控制所述空间光调制器6对所述激光进行调制;以及用于根据所述哈特曼传感器19探测的波前像差,控制所述
空间光调制器6预加载对应的校正相位图,并控制变形镜16加载对应的校正电压矩阵;以及用于控制所述空间光调制器6连续加载生成的多焦点激发点阵相位图,并通过所述探测器21依次接收自适应光学校正后的样品荧光信息,直至多焦点激发光阵列扫描完成,实现多焦点结构光超分辨成像。
[0144]
如图10所示,所述系统还包括:与所述激光器1连接的半波片2、第一透镜3、第二透镜4以及第一反射镜5;与所述空间光调制器6连接的第三透镜7、第二反射镜8以及光阑9;与所述变形镜16连接的二相色镜10、第四透镜11、第三反射镜12、物镜13以及第五透镜15;与所述哈特曼传感器19连接的第六透镜17和第七透镜18;以及与所述探测器21连接的可翻转反射镜20。
[0145]
在实际应用时,所述系统的激光光路及其校正方式具体如上所述,所述荧光光路及其校正方式具体也如上所述。
[0146]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,计算机程序可存储于一非易失性计算机可读存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本发明所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。
[0147]
综上,本发明提供了一种基于自适应光学的多焦点结构光超分辨成像方法及系统,其中,方法包括:将激光扩束准直后照射在空间光调制器上;通过空间光调制器对激光进行调制并传输至样品表面;将单个激发点产生的单光子或多光子荧光波前信息传输至哈特曼传感器;控制空间光调制器预加载对应的校正相位图,并控制变形镜加载对应的校正电压矩阵;控制空间光调制器连续加载多焦点激发点阵相位图,并通过探测器依次接收自适应光学校正后的样品荧光信息。本发明利用空间光调制器调制精度高和变形镜能量利用率高的特点,使用空间光调制器实现激光激发光路的自适应光学校正,提升了成像深度;并使用变形镜实现荧光光路的自适应光学校正,提升了成像分辨率,减少了荧光能量损失。
[0148]
应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。