1.本发明涉及医学影像教学技术领域,特别涉及基于深度学习的医学影像自动化阅片辅助分析设备及方法。
背景技术:
2.医学影像是指为了医疗或医学研究,对人体或人体某部分,以非侵入方式取得内部组织影像的技术与处理过程。它包含以下两个相对独立的研究方向:医学成像系统和医学图像处理。前者是指图像行成的过程,包括对成像机理、成像设备、成像系统分析等问题的研究;后者是指对已经获得的图像作进一步的处理,其目的是或者是使原来不够清晰的图像复原,或者是为了突出图像中的某些特征信息,或者是对图像做模式分类等等。
3.在实习生或进行医学影像学习时,现有的都是逐个的将单个的影像放置在观片灯上进行观看,然后再讲电脑上的电子影像与现有的数据库进行比对,再通过指导老师的经验和现有的少数案例来给学生进行教学,这种方式对应大量的医学影像片进行经验积累性学习时,花费的时间过长,人力操作麻烦,在进行数据比对时对比量少,不便于拿出最佳的比对数据,使得教学效果变差。
4.为解决上述问题。为此,提出基于深度学习的医学影像自动化阅片辅助分析设备及方法。
技术实现要素:
5.本发明的目的在于提供基于深度学习的医学影像自动化阅片辅助分析设备及方法,将多个影像片竖直叠放在影像片输送部件内,且使得上片部件的一端与未测的影像片贴合,启动单片输送部件使得前段第一个影像片向下缓慢移动,并在移动到底后,启动影像片扫描部件将影像片的扫描影像传输到控制器上,控制器从比对影像片数据库进行相似度比对,比对完成后,再从治疗手段记录数据库将对比影像的成功案例数据提取,并将全面内容传输到显示器上,供学员进行深度学习,待比对学习一定时间后,再次启动单片输送部件,此时单片输送部件的末端带动上片部件启动,此时上片部件推动影像片向前移动,完成自动上料,接着重复上述操作,完成学员的快速自动化阅片,可以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:包括支撑壳以及设置在支撑壳上端的影像片输送部件,影像片输送部件的上端内侧设置有影像片,影像片输送部件的一端设置有单片输送部件,单片输送部件的输出端与上片部件啮合连接,上片部件的一端位于影像片输送部件的内侧,便于推动全部的影像片,影像片输送部件的输出端下端设置有影像片扫描部件,影像片扫描部件包括延伸支架以及设置在延伸支架下端的影像扫描器,支撑壳面向影像片扫描部件的一侧设置有观片灯,位于观片灯一侧的支撑壳上端设置有显示器,支撑壳远离观片灯的一端上侧设置有控制器,影像片输送部件、影像扫描器、观片灯和显示器均与控制器电性连接。
7.进一步的,影像片输送部件包括支撑盒以及设置在支撑盒内侧一端的缓冲弹簧,缓冲弹簧的另一端设置有挡片,挡片与最末端的影像片相贴合,位于挡片的下端设置有影像片支撑夹持组件,位于影像片支撑夹持组件下端的支撑盒下端设置有夹持片,影像片支撑夹持组件位于单片输送部件的两侧各设置有一个,夹持片的内侧设置有多个导轮。
8.进一步的,影像片支撑夹持组件包括支撑架以及设置在支撑架两端的扭簧,扭簧的另一端与支撑盒固定连接,支撑架一侧设置有延伸架。
9.进一步的,导轮与观片灯的间距率小于影像片的厚度,延伸架远离支撑架的一端内侧设置有滚动管,滚动管与支撑盒的间隙小于影像片的厚度,便于对影像片进行夹持。
10.进一步的,单片输送部件包括传动组件以及设置在传动组件上端一侧的伺服电机,伺服电机的驱动端与传动组件匹配连接。
11.进一步的,传动组件包括连接壳以及设置在连接壳内侧上端的连接轴齿轮,连接轴齿轮的外侧套接有齿轮带,连接轴齿轮与齿轮带啮合连接,齿轮带的另一端套接有从动轴齿轮,从动轴齿轮的两端与连接壳活动连接,从动轴齿轮与齿轮带啮合连接,齿轮带的外侧设置有下推片。
12.进一步的,伺服电机的驱动末端设置有传动柱,传动柱的一端设置有传动盘,且靠近传动盘的传动柱一端贯穿支撑轴承,支撑轴承安装在支撑盒上,传动盘上端设置有单个的齿条。
13.进一步的,上片部件包括传动齿杆以及设置在传动齿杆末端的衔接杆,衔接杆贯穿支撑盒,且支撑盒上开设有供衔接杆滑动的滑道,衔接杆远离传动齿杆的一端设置有推动片。
14.进一步的,齿条与传动齿杆啮合连接,推动片的下端设置有滚轮。
15.本发明提出的另一种技术方案:提供一种基于深度学习的医学影像自动化阅片辅助分析设备的实施方法,包括以下步骤:
16.s1:伺服电机启动带动连接轴齿轮转动,进而带动齿轮带在连接轴齿轮和从动轴齿轮的外侧转动,进而带动下推片沿着齿轮带的周长轨迹移动,当下推片移动到影像片的上时,向下的推动力推动影像片向下移动,当下推片移动到齿轮带的右下角时,与影像片逐渐脱离,此时影像片的上端位于最上面的导轮上端;
17.s2:当影像片被单片输送部件向下推动时,影像片向下的推力大于扭簧的扭力,此时影像片可以向下移动,且在扭簧的复位扭转力下,可将影像片的上端夹紧,而影像片的下端则被导轮夹紧在观片灯的一侧;
18.s3:影像片在移动到底后,启动影像片扫描部件将影像片的扫描影像传输到控制器上,控制器从比对影像片数据库进行相似度比对,比对完成后,再从治疗手段记录数据库将对比影像的成功案例数据提取,并将全面内容传输到显示器上,供学员进行深度学习;
19.s4:再次启动伺服电机进而带动传动柱转动,传动柱带动传动盘转动,进而带动齿条转动,此时齿条与传动齿杆啮合驱动,进而带动衔接杆向前滑动,进而带动推动片向前推动一个影像片厚度的距离,进而将最前面的影像片推动与挡片相贴合,完成自动上料;
20.s5:重复上述操作,且每次的影像片可将上次的影像片推出,自动下料,最终完成自动化阅片。
21.与现有技术相比,本发明的有益效果是:
22.1.本发明提出的基于深度学习的医学影像自动化阅片辅助分析设备及方法,将多个影像片竖直叠放在影像片输送部件内,且使得上片部件的一端与未测的影像片贴合,启动单片输送部件使得前段第一个影像片向下缓慢移动,并在移动到底后,启动影像片扫描部件将影像片的扫描影像传输到控制器上,控制器从比对影像片数据库进行相似度比对,比对完成后,再从治疗手段记录数据库将对比影像的成功案例数据提取,并将全面内容传输到显示器上,供学员进行深度学习,待比对学习一定时间后,再次启动单片输送部件,此时单片输送部件的末端带动上片部件启动,此时上片部件推动影像片向前移动,完成自动上料,接着重复上述操作,完成学员的快速自动化阅片,且利用大数据库可提取出最佳的对比影像,达到快速的学员深度学习,且短时间内可进行批量的学习,提高学习效率。
23.2.本发明提出的基于深度学习的医学影像自动化阅片辅助分析设备及方法,当影像片被单片输送部件向下推动前,影像片被影像片支撑夹持组件支撑,保证影像片不会向下自然滑动,当影像片被单片输送部件向下推动时,影像片向下的推力大于扭簧的扭力,此时影像片可以向下移动,且在扭簧的复位扭转力下,可将影像片的上端夹紧,而影像片的下端则被导轮夹紧在观片灯的一侧,保证观片灯向下输送时为平面状态,不会弯曲或变形,保证扫描效果。
附图说明
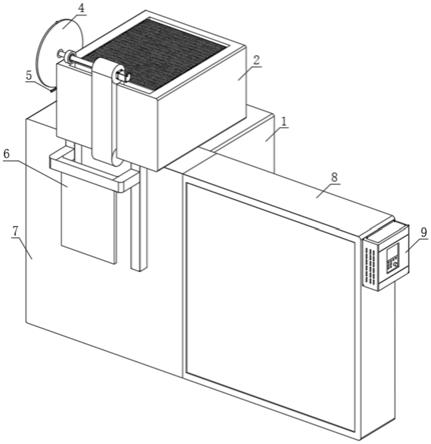
24.图1为本发明基于深度学习的医学影像自动化阅片辅助分析设备的整体立体结构示意图;
25.图2为本发明基于深度学习的医学影像自动化阅片辅助分析设备的控制模块示意图;
26.图3为本发明基于深度学习的医学影像自动化阅片辅助分析设备的大数据对比流程模块结构示意图;
27.图4为本发明基于深度学习的医学影像自动化阅片辅助分析设备的影像输送对应结构示意图;
28.图5为本发明基于深度学习的医学影像自动化阅片辅助分析设备的影像片输送部件侧视平面结构示意图;
29.图6为本发明基于深度学习的医学影像自动化阅片辅助分析设备的图5的a处放大结构示意图;
30.图7为本发明基于深度学习的医学影像自动化阅片辅助分析设备的影像片支撑夹持组件立体结构示意图;
31.图8为本发明基于深度学习的医学影像自动化阅片辅助分析设备的单片输送部件立体结构示意图;
32.图9为本发明基于深度学习的医学影像自动化阅片辅助分析设备的传动组件内部平面结构示意图;
33.图10为本发明基于深度学习的医学影像自动化阅片辅助分析设备的上片部件立体结构示意图。
34.图中:1、支撑壳;2、影像片输送部件;21、支撑盒;22、挡片;23、缓冲弹簧;24、影像片支撑夹持组件;241、支撑架;242、扭簧;243、延伸架;244、滚动管;25、夹持片;26、导轮;3、
影像片;4、单片输送部件;41、传动组件;411、连接壳;412、连接轴齿轮;413、齿轮带;414、从动轴齿轮;415、下推片;42、伺服电机;43、传动柱;45、传动盘;44、支撑轴承;46、齿条;5、上片部件;51、传动齿杆;52、衔接杆;53、推动片;54、滚轮;6、影像片扫描部件;61、延伸支架;62、影像扫描器;7、观片灯;8、显示器;9、控制器。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.本发明为了解决对应大量的医学影像片进行经验积累性学习时,花费的时间过长,人力操作麻烦,在进行数据比对时对比量少,不便于拿出最佳的比对数据,使得教学效果变差的问题,请参阅图1-4,
37.一种基于深度学习的医学影像自动化阅片辅助分析设备,包括支撑壳1以及设置在支撑壳1上端的影像片输送部件2,影像片输送部件2的上端内侧设置有影像片3,影像片输送部件2的一端设置有单片输送部件4,单片输送部件4的输出端与上片部件5啮合连接,上片部件5的一端位于影像片输送部件2的内侧,参阅图5,便于推动全部的影像片3,影像片输送部件2的输出端下端设置有影像片扫描部件6,影像片扫描部件6包括延伸支架61以及设置在延伸支架61下端的影像扫描器62,支撑壳1面向影像片扫描部件6的一侧设置有观片灯7,位于观片灯7一侧的支撑壳1上端设置有显示器8,支撑壳1远离观片灯7的一端上侧设置有控制器9,影像片输送部件2、影像扫描器62、观片灯7和显示器8均与控制器9电性连接。
38.具体的,将多个影像片3竖直叠放在影像片输送部件2内,且使得上片部件5的一端与未测的影像片3贴合,启动单片输送部件4使得前段第一个影像片3向下缓慢移动,并在移动到底后,启动影像片扫描部件6将影像片3的扫描影像传输到控制器9上,控制器9从比对影像片数据库进行相似度比对,比对完成后,再从治疗手段记录数据库将对比影像的成功案例数据提取,并将全面内容传输到显示器8上,供学员进行深度学习,待比对学习一定时间后,再次启动单片输送部件4,此时单片输送部件4的末端带动上片部件5启动,此时上片部件5推动影像片3向前移动,完成自动上料,接着重复上述操作,完成学员的快速自动化阅片,且利用大数据库可提取出最佳的对比影像,达到快速的学员深度学习,且短时间内可进行批量的学习,提高学习效率。
39.本发明为了解决影像片自动输送扫描的问题,请参阅图4-9,
40.影像片输送部件2包括支撑盒21以及设置在支撑盒21内侧一端的缓冲弹簧23,缓冲弹簧23的另一端设置有挡片22,挡片22与最末端的影像片3相贴合,位于挡片22的下端设置有影像片支撑夹持组件24,位于影像片支撑夹持组件24下端的支撑盒21下端设置有夹持片25,影像片支撑夹持组件24位于单片输送部件4的两侧各设置有一个,夹持片25的内侧设置有多个导轮26,导轮26与观片灯7的间距率小于影像片3的厚度,便于对影像片3进行夹持。
41.影像片支撑夹持组件24包括支撑架241以及设置在支撑架241两端的扭簧242,扭簧242的另一端与支撑盒21固定连接,支撑架241一侧设置有延伸架243,延伸架243远离支
撑架241的一端内侧设置有滚动管244,滚动管244与支撑盒21的间隙小于影像片3的厚度。
42.当影像片3被单片输送部件4向下推动前,影像片3被影像片支撑夹持组件24支撑,保证影像片3不会向下自然滑动,当影像片3被单片输送部件4向下推动时,影像片3向下的推力大于扭簧242的扭力,此时影像片3可以向下移动,且在扭簧242的复位扭转力下,可将影像片3的上端夹紧,而影像片3的下端则被导轮26夹紧在观片灯7的一侧,保证观片灯7向下输送时为平面状态,不会弯曲或变形,保证扫描效果。
43.单片输送部件4包括传动组件41以及设置在传动组件41上端一侧的伺服电机42,伺服电机42的驱动端与传动组件41匹配连接。
44.传动组件41包括连接壳411以及设置在连接壳411内侧上端的连接轴齿轮412,连接轴齿轮412的外侧套接有齿轮带413,连接轴齿轮412与齿轮带413啮合连接,齿轮带413的另一端套接有从动轴齿轮414,从动轴齿轮414的两端与连接壳411活动连接,从动轴齿轮414与齿轮带413啮合连接,齿轮带413的外侧设置有下推片415。
45.伺服电机42启动带动连接轴齿轮412转动,进而带动齿轮带413在连接轴齿轮412和从动轴齿轮414的外侧转动,进而带动下推片415沿着齿轮带413的周长轨迹移动,当下推片415移动到影像片3的上时,向下的推动力推动影像片3向下移动,当下推片415移动到齿轮带413的右下角时,与影像片3逐渐脱离,此时影像片3的上端位于最上面的导轮26上端,参阅图5,进而完成影像片3的自动推动。
46.伺服电机42的驱动末端设置有传动柱43,传动柱43的一端设置有传动盘45,且靠近传动盘45的传动柱43一端贯穿支撑轴承44,支撑轴承44安装在支撑盒21上,传动盘45上端设置有单个的齿条46。
47.本发明为了解决自动推送影像片的问题,请参阅图8-10,
48.上片部件5包括传动齿杆51以及设置在传动齿杆51末端的衔接杆52,齿条46与传动齿杆51啮合连接,衔接杆52贯穿支撑盒21,且支撑盒21上开设有供衔接杆52滑动的滑道,衔接杆52远离传动齿杆51的一端设置有推动片53,推动片53的下端设置有滚轮54。
49.当前一片影像片3被向下推动扫描后,再次启动伺服电机42进而带动传动柱43转动,传动柱43带动传动盘45转动,进而带动齿条46转动,此时齿条46与传动齿杆51啮合驱动,进而带动衔接杆52向前滑动,进而带动推动片53向前推动一个影像片3厚度的距离,进而将最前面的影像片3推动与挡片22相贴合,完成自动上料,且此时下推片415位于影像片3的上端,实现影像片3的自动上片,自动化程度高,提高阅片速度。
50.本发明提出的另一种技术方案:提供基于深度学习的医学影像自动化阅片辅助分析设备的实施方法,包括以下步骤:
51.步骤一:伺服电机42启动带动连接轴齿轮412转动,进而带动齿轮带413在连接轴齿轮412和从动轴齿轮414的外侧转动,进而带动下推片415沿着齿轮带413的周长轨迹移动,当下推片415移动到影像片3的上时,向下的推动力推动影像片3向下移动,当下推片415移动到齿轮带413的右下角时,与影像片3逐渐脱离,此时影像片3的上端位于最上面的导轮26上端;
52.步骤二:当影像片3被单片输送部件4向下推动时,影像片3向下的推力大于扭簧242的扭力,此时影像片3可以向下移动,且在扭簧242的复位扭转力下,可将影像片3的上端夹紧,而影像片3的下端则被导轮26夹紧在观片灯7的一侧;
53.步骤三:影像片3在移动到底后,启动影像片扫描部件6将影像片3的扫描影像传输到控制器9上,控制器9从比对影像片数据库进行相似度比对,比对完成后,再从治疗手段记录数据库将对比影像的成功案例数据提取,并将全面内容传输到显示器8上,供学员进行深度学习;
54.步骤四:再次启动伺服电机42进而带动传动柱43转动,传动柱43带动传动盘45转动,进而带动齿条46转动,此时齿条46与传动齿杆51啮合驱动,进而带动衔接杆52向前滑动,进而带动推动片53向前推动一个影像片3厚度的距离,进而将最前面的影像片3推动与挡片22相贴合,完成自动上料;
55.步骤五:重复上述操作,且每次的影像片3可将上次的影像片3推出,自动下料,最终完成自动化阅片。
56.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
57.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。