1.本实用新型属于光学技术领域,涉及对光路中各光学功能组件的定位系统,特别涉及一种利用点定位的定位块及光学定位系统。
背景技术:
2.目前在实验室,光学系统搭建时,都需要用多维调节架对系统进行光路调节,在一些复杂的光学系统中,需要耗费大量的工作在光路搭建上。而且,由于光路自由度太高,系统几乎不具有重复性,每次光路结构发生变化时,都需要对系统进行再次调整,浪费大量时间精力。为此,申请人的在先申请cn110618512a提出“定位块、基于定位块的光学定位系统和方法及功能模组”。在该申请中“其定位系统包括:一个上表面水平底板,至少一个包含平直定位侧边的靠体,若干用于搭载光学组件和定位的定位块,底板上还可以有可移动载板。利用定位块底部紧贴底板或载板实现垂直方向的定位,利用定位块侧面与靠体定位侧边贴合,实现水平方向的位置定位。根据不同的光路设计,在需要位置的定位块上搭载光学组件;通过连接结构,将所有光学组件的中心点,位于同一高度,光发射组件通过机械调整,使得出射光跟定位块定位侧面和底面平行,其他光学组件的中心点跟出射光的高度一致。实现光学系统基本准确的定位。”实现了高重复性的可重构的光学系统,在该定位系统中,作为基本定位单元的定位块,其平面x和y方向的定位,是依靠其平整的侧面与靠体贴合或彼此连续贴合,来实现定位和位置的传递。这一方案中,当两个平面凹凸不平的时候,定位块多次重复贴合后,会出现不同的定位配合,定位的准确定重复性不高。这样,定位块就需要有精确的外周尺寸及定位侧边具有精确的平整度,对材料和加工精度都有很高的要求。为了克服这一缺陷,本实用新型提出一种点定位的定位块及光学定位系统。
技术实现要素:
3.本实用新型的目的是,提供一种对定位面精度要求不高,却更容易实现精准定位和重复的一致性的一种点定位的定位块及光学定位系统。
4.以下具体说明本实用新型的技术方案。因定位块与定位系统高度关联,故对两者一起说明。
5.本方案的原理是几何学上的两点决定一线,(不在同直线上的)三点决定一面。在作为背景技术中的cn110618512a中,定位是靠定位面之间的完全贴合实现的,只要定位面的平整度有误差,就会影响定位精度。但实现某一个方向的一维定位,并不需要两个定位面完全贴合,而只需要确定两个定位点;实现两个方向的二维定位也不需要两个方向的定位面完全贴合,而只需要少至三个定位点。
6.本实用新型的一种点定位的定位块,用于光学定位系统,包括主体部和突出部,主体部包括可用于搭载光学器件的上表面及定位侧面,至少在一个定位侧面上有用于定位的突出部。突出部的端部贴合靠体定位面或另一个定位块的定位面,以实现定位。
7.在本实用新型中将突出部的端部定义为定位端。定位时相接触的定位端之间的接
触点或定位端与定位面的接触点均称为定位点。端部可以是球面、柱面、锥面、楔形面和平面等。故由于端部设置不同,其定位时的接触在几何上可能是点接触,也可能是短线接触,还可能是一个小的接触面,但与所在的整个侧面相比仍可视为一个点,符合本实用新型两点决定一线的原理,因此本实用新型中忽略严格的几何定义,均称为定位点。相应地这种定位方式称为点定位。
8.不同的光路对定位有不同的要求,使得对定位块的要求也不同。一种定位要求只需要在一维方向上让光学器件对准,这时只需要不同的定位块靠紧同一x方向的基准线即可;另一种则需要在平面坐标的二维即x和y方向均对准,这时就需要从基准位置起,用确定长宽的定位块在x和y方向靠紧排列以传递位置。以下分别讨论这两种情况的定位块和定位系统。
9.一、一维定位块及光学定位系统
10.在仅需一维方向定位时,定位块仅需要一个定位侧边,在该定位侧面设置两个突出部。
11.其定位系统包括底板和置于底板上的一维定维块和一维靠体,以一维靠体定位侧面为基准方向,承载不同光学器件的各定位块定位侧面的突出部,贴合该靠体即取得同一个方向。在搭载光学器件时,使其通光方向与靠体定位侧面平行且距离相同,即可使光路在同一直线上。因为提供方向基准的仅为两个定位点的水平连线,所以对定位块主体部的形状没有限制。
12.二、二维定位块及光学定位系统
13.在需要二维方向定位时,正如本实用新型所引用的背景技术,定位块的水平截面为矩形,定位块的水平截面大小相同或为模数化设计的大小不同的矩形。不同定位块间贴合排列向x和y方向延伸,实现x和y方向的定位。与背景技术不同的是,本专利的定位块以点定位代替背景技术中的面接触定位。本实用新型提供两种方案。
14.(一)三定位端方案:
15.一种基准定位块,其一个x向侧面有两个突出部,形成两个x向定位端;一个相邻的y向侧面有一个突出部,形成一个y向定位端。两x向定位端到相对侧面的垂直方向(y方向)的对应点分别为与其距离均为s的定位点,y向定位端到相对侧面的平行方向(x方向)的对应点为与其距离为s的定位点。故共有六个定位点,将六个定位点依定位方向(x和y方向)连线,构成边长为s的正方形。
16.之所以只设一个y向定位端,是因为这样就无需考虑两个方向的定位端是否垂直,由这三点决定一面,只要上述六个定位点准确,y方向可自适应与x方向垂直。
17.其光学定位系统包括底板和置于底板上的二维定维块和二维靠体,二维靠体有呈90度角的x和y方向的两个定位侧面,以靠体的两个定位侧面为起始位置,将基准定位块沿x和y方向贴合排布,即可构成以l为单位的矩形网格定位系统。
18.为适应不同大小光学器件的要求,以及定位的快速传递,还可以有非标准的定位块,长宽为如前述标准定位块距离s的整倍数。
19.在本方案中,由于定位是定位点确定的,不依赖于侧面的平整,所以对定位块主体部的形状和精度没有严格的要求。当然主体部可以是截面为正方形,这样突出部和定位点的位置可以在整个侧面灵活设定。
20.本方案中的定位块的主体部可以是框型,突出部在框的外侧,框的内部可用于定位光学器件。
21.定位块的主体部和突出部可以是分体固定,也可以一体成型。
22.为使定位块之间可靠接触定位,可使主体部为铁磁性材料,突出部为强磁体。
23.(二)单位圆片方案:
24.将直径为d的一定厚度的圆片或圆环作为单位圆,两个单位圆并列贴靠,上面固定长度小于2d宽度小于d的定位块主体,使两个基准圆片的外周突出于定位块主体的侧边,形成六个突出端(每个长边2个,每个短边1个)。该结构的定位块为基准定位块。
25.其定位系统为,在底板上以二维靠体的x和y定位侧面为起始位置,将基准定位块沿x和y方向贴合排布,即可构成以d为单位的矩形网格定位系统。其中基准定位块之间的定位点均是单位圆相切的点。
26.在本方案中,为适应不同大小光学器件的要求,以及定位的快速传递,还可以设置非基准定位块,即长宽边均有不少于两个单位圆,并呈矩形排列。这样,其平面大小为基准定位块的整倍数。
27.在本方案的定位系统中,对于不需要承载光学器件的位置,可以用单位圆片填充传递定位。
28.在本实用新型,以符号表示的长度,其具体数值可根据需要设定。
29.本实用新型的定位块和光学定位系统,利用点定位既降低了对定块的材料要求和加工精度要求,又提升了定位的精度和光路重构的一致性。
附图说明
30.图1是本实用新型中一维定位块的示意图;
31.图2是本实用新型中一维光学定位系统的示意图;
32.图3是本实用新型中基准三定位端二维定位块的示意图;
33.图4和图5是本实用新型中非基准三定位端二维定位块的示意图;
34.图6和图7是本体和突出部一体成形的定位块示意图;
35.图8至图11是几种突出部形状的示意图;
36.图12是一种主体部为框形的三定位端二维定位块的示意图;
37.图13和图14是本实用新型利用三定位端二维定位块光学定位系统的示意图;
38.图15是本实用新型中基准单位圆二维定位块的示意图;
39.图16是本实用新型中非基准单位圆二维定位块的示意图;
40.图17是本实用新型利用单位圆二维定位块光学定位系统的示意图。
41.图中:110.一维定位块,111.主体部,112.突出部,210.一维靠体,300.底板,220.二维靠体,120.三定位端二维定位块,122.x向突出部,123.y向突出部,130.单位圆二维定位块,132.单位圆。
具体实施方式
42.以下结合附图,具体说明本实用新型的实施方式。因定位块的结构与光学定位系统的结构密切相关,故一并予以说明。
43.实施例一、一维定位块及光学定位系统
44.图1所示为一维定位块110的结构,包括主体部111和其一侧面的两个突出部112。
45.图2是一维光学定位系统,在底板300上,有一维定位块110,以一维靠体210定位侧面为基准方向,承载不同光学器件的一维定位块110的定位侧面的突出部112,贴合该靠体即取得同一个方向。本例的光路为两个准直器和中间的一个滤波片构成的一维光路,两个准直器和一个滤波片各搭载在一个一维定位块110上,使各光学器件的通光方向与一维靠体120的定位侧面平行且距离相同,则光路在同一直线上。图中虚线为光路,d为光路与定位侧面的距离。因为提供方向基准的仅为两个定位点的水平连线,亦即一维靠体120的定位侧面,所以对一维定位块110主体部111的形状没有限制。在附图2中搭载准直器1的定位块主体为矩形,搭载滤波片的定位块主体为不规则形状,搭载准直器2的定位块主体为方向偏转了的矩形,但均不影响其定位效果。
46.实施例二、二维定位块及光学定位系统
47.(一)三定位端方案:
48.如图3所示,为一种基准三定位端二维定位块120,包括主体部111,其一个x方向侧面有两个x向突出部122,形成两个x向定位端;与其相邻的一个y向侧面有一个y向突出部123,形成一个y向定位端。两x向定位端到相对侧面的垂直方向(y方向)的对应点分别为与其距离均为s的定位点,y向定位端到相对侧面的平行方向(x方向)的对应点为与其距离为s的定位点。故共有六个定位点,将六个定位点依定位方向(x和y方向)连线,构成边长为s的正方形,见图中双箭头标线和虚线框。
49.如图4和图5,为适应不同大小光学器件的要求,以及定位的快速传递,还可以有非基准尺寸的定位块,长宽为上段所说距离s的整倍数。
50.定位块的主体部与突出部可以是分体固定连接结构,也可是如图6和图7一体成型。
51.如图8至图11所示,突出部可是各种形状。图8所示的是端部为半球的柱形,图9所示的是顶部为球冠的柱形,图10所示的突出部整体为半球或球冠,图11所示为部分柱面形。还可以是未图示出的锥形、锲形、圆台形等。其定位接触部位,不一定是几何学上的定,也可能是一条短线(如图11为纵向的切线),或一个小的面。但只要与其所在的侧面相比足够小,在本实用新型中都视为是点接触、点定位。
52.如图12所示,本方案中的定位块的主体部可以是框型,突出部在框的外侧,框的内部可用于定位光学器件。
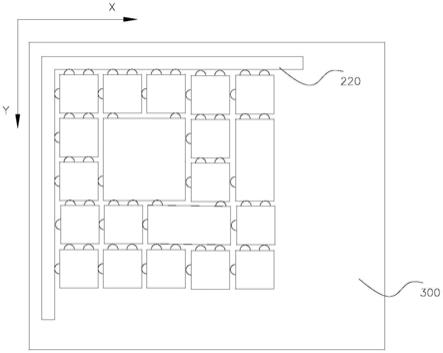
53.图13和图14是其光学定位系统:在底板300上有和二维靠体220和三定位端二维定位块,二维靠体220有呈90度角的x和y方向的两个定位侧面,以该两个定位侧面为起始位置,将三定位端二维定位块(120)沿x和y方向贴合排布,即构成光学定位系统。图13中,定位块全部为基准三定位端二维定位块,可构成以s为单位的矩形网格定位系统;图14中的定位块,既有基准三定位端二维定位块也有非基准三定位端二维定位块,较大面积的非基准三定位端二维定位块可搭载较大的光学器件,也可使位置传递更快,使用更少的定位块简化定位系统。
54.在本方案中,由于定位是定位点确定的,不依赖于侧面的平整,所以对定位块主体部的形状和精度没有严格的要求。当然主体部可以是截面为正方形,这样突出部和定位点
的位置可以在整个侧面灵活设定。
55.为使定位块之间可靠接触定位,可使主体部为铁磁性材料,突出部为强磁体。
56.(二)单位圆片方案:
57.如图15。直径为d的一定厚度的圆片或圆环作为单位圆132,两个单位圆并列贴靠,上面固定长度小于2d宽度小于d的定位块主体111,使两个基准圆132的外周突出于定位块主体111的侧边,形成六个突出部(每个长边2个,每个短边1个)。该结构的定位块为基准单位圆二维定位块。
58.如图16。为适应不同大小光学器件的要求,以及定位的快速传递,还可以设置非基准的单位圆二维定位块,即长宽边均有不少于两个单位圆,并呈矩形排列。这样,其平面大小为基准定位块的整倍数。
59.如图17所示。本实施例定位系统为,在底板300上以二维靠体220的x和y方向定位侧面为起始位置,单位圆二维定位块沿x和y方向贴合排布,即可构成以d或d的整倍数为单位的网格定位系统。其中定位块之间的定位点均是单位圆132相切的点。在图17的实施例中,对于不需要承载光学器件的位置,可以用单位圆片填充传递定位。