1.本发明涉及光学装置,特别是适合于提供可变光焦度以便矫正屈光不正的光学装置。
2.更精确地,本发明涉及一种包括透镜和控制构件的光学装置,该控制构件被配置为使得控制构件的运动产生沿透镜光轴提供的光焦度的变化。本发明还涉及一种包括这种光学装置的验光设备。
背景技术:
3.文件wo 2015/107303描述了刚刚提到的光学装置。
4.这种光学装置进一步包括构架、马达和驱动构件,比如蜗杆:所述马达包括输出轴,所述驱动构件固定在输出轴上,马达和控制构件(例如齿轮)安装在构架中,使得驱动构件和控制构件机械地协作。
5.因此,通过对马达的适当控制,可以启动驱动构件并将控制构件移动(例如旋转齿轮)到透镜提供特定光焦度的位置。
6.然而,在这种情况下使用的马达(通常是电动马达)通常在其输出轴的位置设计有轴向游隙,以确保在宽的温度范围内正常运行。
7.然而,这种轴向游隙使得驱动构件相对于构架的定位不准确,并因此导致对控制构件从马达的运动的控制不精确。
8.这在没有关于控制构件的实际位置的信息可用时尤其成问题,例如当运动控制是基于确定输出轴的角位置的编码器时。
技术实现要素:
9.在这种情况下,本发明提供了一种光学装置,光学装置包括透镜和控制构件,控制构件被配置为使得控制构件的运动产生沿透镜的光轴提供的光焦度的变化,光学装置进一步包括构架、马达和驱动构件,所述马达包括可旋转地联接到所述驱动构件的输出轴,马达和控制构件安装在构架中,使得驱动构件和控制构件机械地协作,其特征在于驱动构件可旋转地安装在构架中,并且光学装置包括偏置器件以用于将驱动构件沿输出轴的轴线并相对于构架保持在预定的轴向位置。
10.驱动构件因此被精确地定位并且因此可以准确地对控制构件的运动进行控制,这产生对由光学装置提供的光焦度的精确控制。
11.光学装置还可以包括以下特征中的一个特征或若干特征:
[0012]-驱动构件通过至少一个滚动轴承安装在构架内;
[0013]-偏置器件被布置为将驱动构件与滚动轴承的组件轴向推靠在构架的壁上;
[0014]-驱动构件压配合到所述至少一个滚动轴承的内圈中;
[0015]-偏置器件被布置成将所述至少一个滚动轴承的外圈轴向推靠在所述壁上;
[0016]-驱动构件通过所述至少一个滚动轴承和另一个滚动轴承安装在构架中;
[0017]-偏置器件插置在该另一个滚动轴承与构架之间,使得所述至少一个滚动轴承被推靠在构架的所述壁上;
[0018]-所述至少一个滚动轴承和另一个滚动轴承分别安装在驱动构件的被驱动构件的螺纹轴向部分分开的两个轴向部分上;
[0019]-所述至少一个滚动轴承和另一个滚动轴承安装在驱动构件的第一轴向部分上;
[0020]-驱动部件也通过另一滚动轴承安装到构架上;
[0021]-所述另一滚动轴承安装在驱动构件的第二轴向部分上;
[0022]-第一轴向部分和第二轴向部分被驱动构件的螺纹轴向部分分开;
[0023]-偏置器件包括螺旋弹簧;
[0024]-偏置器件包括弹簧垫圈;
[0025]-所述偏置器件适合于沿着所述输出轴的轴线施加比驱动构件施加在控制构件上以驱动控制构件运动的力跟大的偏置力;
[0026]-光学装置进一步包括编码器,编码器与马达相关联以用于确定输出轴的角位置;
[0027]-驱动构件是蜗杆;
[0028]-控制构件是齿轮;
[0029]-蜗杆与齿轮啮合;
[0030]-透镜是可随控制构件旋转的柱面透镜;
[0031]-本发明还可以提供一种适合于提供可通过控制构件的旋转调节的可变球镜度的透镜。
[0032]
本发明还提供了一种包括光学装置的验光设备(例如验光器)。
具体实施方式
[0033]
以下参照附图详细地描述了本发明的说明性实施例,在附图中:
[0034]-图1是根据本发明的可能实施例的光学装置的功能图;
[0035]-图2是图1的光学装置的第一传动系统的局部视图;
[0036]-图3是第一传动系统的侧视图;
[0037]-图4是图1的光学装置的第二传动系统的局部视图;以及
[0038]-图5是第二传动系统的侧视图。
[0039]
图1表示根据本发明的教导构造的光学装置2的元件。
[0040]
这种光学装置2包括至少一个透镜12;52;92、至少一个马达14;54;94和至少一个传动系统16;56;96,该传动系统被配置为移动透镜12;52;92的至少一部分,由此在操作马达14;54;94时改变沿透镜12;52;92的光轴x提供的光焦度。
[0041]
在本示例中,光学装置2包括:
[0042]-第一马达14、(沿透镜12的光轴x)具有可变球镜度的透镜12、以及第一传动系统16,第一传动系统被配置为在操作第一马达14时旋转透镜12的环并(沿透镜12的光轴x)改变球镜度;
[0043]-第二马达54、第一柱面透镜52(即沿透镜52的光轴x具有柱镜度的透镜)、以及第二传动系统56,第二传动系统被配置为在操作第二马达54时旋转第一柱面透镜52以改变光焦度(这里为柱镜矫正轴位);
[0044]-第三马达94、第二柱面透镜92(即沿透镜52的光轴x具有柱镜度的透镜)、以及第三传动系统96,第三传动系统被配置为在操作第二马达54时旋转第二柱面透镜92以改变光焦度(这里为柱镜矫正轴位)。
[0045]
这些元件安装在光学装置2的构架8中,使得具有可变球镜度的透镜12、第一柱面透镜52和第二柱面透镜92具有相同的光轴x(如图1中示意性表示的)。关于这方面的进一步细节可以参考文件wo2015/107303。
[0046]
如图1所示,光学装置2还包括控制电路6,该控制电路被设计为控制马达(这里是第一马达14、第二马达54和第三马达94)的运动,使得透镜或透镜12、52、92的组合提供寻求的光焦度,如文件wo 2015/107303中所说明的。
[0047]
光学装置2因此可以用于向人的眼睛提供预定义的光学矫正(当这只眼睛沿着光轴x定位时)。光学装置2因此可以被包括在光学设备中,比如验光器(或验光仪),以在例如对患者进行主觉验光测试时使用。
[0048]
在本实施例中,每个马达14;54;94包括编码器,编码器用于确定相关马达14;54;94的输出轴18;58的角位置,以及用于将表示此角位置的信息发送到控制电路6(基于该信息,控制电路6可以精确地控制相关输出轴18;58的位置)。
[0049]
现在将参考图2至图5描述第一传动系统16和第二传动系统56。第三传动系统96以与第二传动系统56相同的方式构造并且因此将不再进一步描述。
[0050]
每个传动系统16;56包括驱动构件20;60以及控制构件22;62,该驱动构件可旋转地联接到对应马达14;54的输出轴18;58,该控制构件被设计为在移动时产生沿相关透镜12;52的光轴x提供的光焦度的变化。
[0051]
驱动构件20;60相对于对应马达14;54的输出轴18;58安装以便连接或固定到输出轴18;58,使得驱动构件20;60和输出轴18;58在围绕输出轴的轴线旋转时(即,当对应马达14;54操作时)联接。然而,驱动构件20;60实际上可以相对于输出轴18;58安装,以便相对于输出轴18;58沿输出轴18;58的轴线平移。
[0052]
在本实施例中,驱动构件20;60是蜗杆。此蜗杆20;60这里固定到输出轴18;58,蜗杆20;60的轴线沿着输出轴18;58的轴线延伸,使得输出轴18;58的旋转(当操作马达14;54时)引起蜗杆20;60(围绕蜗杆20;60的轴线)旋转。
[0053]
在本实施例中,控制构件22;62是齿轮。此齿轮22;62与蜗杆20;60啮合,使得蜗杆20;60(围绕蜗杆20;60的轴线)的旋转产生齿轮22;62围绕齿轮22;62的轴线的旋转(齿轮22;62的轴线垂直于蜗杆20;60的轴线,即垂直于马达14;54的输出轴18;58的轴线,和/或位于距蜗杆20;60的轴线一定距离处)。
[0054]
图2和图3示出了第一传动系统16的细节。
[0055]
如图2中可见,在本实施例中,构架8包括框架9和套筒24。框架9例如由塑料材料制成,比如聚醚醚酮(peek)。套筒24例如由金属制成,例如不锈钢。
[0056]
套筒24例如被接纳在形成在框架9中的互补凹部26中并且由于通过螺钉30固定到框架9的环28而固位在此互补凹部26中。
[0057]
套筒24限定通孔32,马达14的输出轴18和驱动构件20延伸穿过该通孔。通孔32包括用于部分地容纳马达14的第一圆柱形部分34和用于至少容纳滚动轴承(这里是两个滚动轴承38、40)的第二圆柱形部分36。
[0058]
套筒24在第二圆柱形部分36的轴向端部处形成环形壁42以供轴承38邻接,如下文进一步说明的。
[0059]
框架9限定与凹部26连通的空腔44。在本实施例中,空腔44包括(沿着空腔44的轴线,依次地从位于凹部26附近的部分到远离凹部26的部分):
[0060]-具有第一直径的第一圆柱形部分45;
[0061]-具有小于第一直径的第二直径的第二圆柱形部分46;以及,这里
[0062]-具有小于第二直径的第三直径的第三圆柱形部分47。
[0063]
在本示例中,第一圆柱形部分45容纳弹簧垫圈43。框架9具有环形壁49(连接第一圆柱形部分45和第二圆柱形部分46,即由第一圆柱形部分45与第二圆柱形部分46之间的直径差形成)。
[0064]
弹簧垫圈43因此被(轴向地)固持在壁49与滚动轴承40的外圈之间并且将滚动轴承组件38、40压靠在形成在构架8中(这里是在套筒24中)的壁42上。
[0065]
另一个滚动轴承48容纳在空腔中位于第三圆柱形部分47的高度处。滚动轴承48能够在弹簧垫圈43的力的作用下轴向平移并紧密安装在驱动构件20上。
[0066]
驱动构件20包括第一轴向部分23、第二轴向部分25、以及将第一轴向部分23和第二轴向部分25分开(即,这里沿驱动构件20的轴线在它们之间延伸)的螺纹部分21。
[0067]
第二圆柱形部分46的直径(如上所述的第二直径)大于驱动构件20的螺纹部分21的外径(以使空腔44容纳驱动构件20)。
[0068]
滚动轴承38、40安装在驱动构件20的第一轴向部分23上。精确地说这里,驱动构件20的第一轴向部分23压配合到滚动轴承38、40的相应内圈中。
[0069]
另一个滚动轴承48安装在驱动构件20的第二轴向部分25上。精确地说这里,驱动构件20的第二轴向部分25压配合到另一滚动轴承48的内圈中。
[0070]
驱动构件20因此可旋转地安装在构架8中(围绕驱动构件20的轴线、这里对应于输出轴的轴线旋转)。
[0071]
由于刚刚描述的构造,当滚动轴承组件38、40由于弹簧垫圈43而被推靠在构架8的壁42上并且驱动构件20被压配合到滚动轴承38、40的内圈中时,驱动构件20相对于构架8沿输出轴18的轴线(这里与驱动构件20的轴线相同)保持在预定的轴向位置。
[0072]
弹簧垫圈43可以例如被选择为沿着输出轴18的轴线施加比驱动构件20施加在控制构件22上以驱动控制构件22运动的力更大的偏置力(例如,是驱动构件20施加的所述力的三倍或更大,这里是驱动构件20施加的所述力的四倍或更大)。
[0073]
弹簧刚度被设计设置/选择为使得热膨胀不会明显影响弹簧垫圈43沿输出轴18的轴线施加的偏置力。
[0074]
例如,驱动构件20施加在控制构件22上以驱动控制构件22运动的力在0.05n到0.2n之间,这里为0.1n;由弹簧垫圈43沿输出轴18的轴线施加的偏置力在0.2n到1n之间,这里为0.4n。
[0075]
控制构件22的运动(这里为旋转)因此可以通过驱动构件20(其自身由马达14驱动)的对应运动来精确控制。因此改进了由透镜12沿透镜轴线x提供的光焦度(这里是球镜度)的控制。
[0076]
在当前情况下,控制构件22的旋转通过螺杆装置(未示出)被转换成平移运动,这
种平移运动产生透镜12的可变形膜(未示出)的变形,从而改变透镜12的球镜度。
[0077]
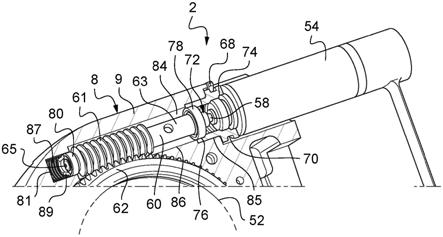
图4和图5示出了第二传动系统56的细节。
[0078]
如图4所示,构架8这里还包括衬套64(附加于已经提到的框架)。衬套64例如由金属制成,例如不锈钢。
[0079]
框架9限定了空腔84,该空腔包括(沿着空腔84的轴线,依次地从位于马达54附近的部分到远离马达54的部分):
[0080]-具有第四直径的第一圆柱形部分85;
[0081]-具有小于第三直径的第五直径的第二圆柱形部分86;以及,这里
[0082]-具有小于第二直径的第六直径的第三圆柱形部分87。
[0083]
衬套64这里被接纳在空腔84中在第一圆柱形部分85的高度处。衬套64的一部分具有圆柱形形状,其直径对应于上述第四直径。衬套64例如通过与形成在衬套64上的凹槽70协作的夹子68固定到框架9上。
[0084]
衬套64限定通孔72,马达54的输出轴58和驱动构件60的端部延伸穿过该通孔。
[0085]
衬套64限定了部分地接纳马达54的第一凹部74和容纳滚动轴承78的第二凹部76(位于与第一凹部74轴向相反的位置)。
[0086]
第二凹部76限定了环形壁82,滚动轴承78邻接抵靠在环形壁上,如下文进一步说明的。
[0087]
驱动构件60包括第一轴向部分63、第二轴向部分65、以及将第一轴向部分63和第二轴向部分65分开(即,这里沿驱动构件60的轴线在它们之间延伸)的螺纹部分61。
[0088]
第二圆柱形部分86的直径(如上所述的第五直径)大于驱动构件60的螺纹部分61的外径(以供空腔84容纳驱动构件60)。
[0089]
滚动轴承78安装在驱动构件60的第一轴向部分63上。精确地说这里,驱动构件60的第一轴向部分63的端部压配合到滚动轴承78的相应内圈中。
[0090]
另一个滚动轴承80安装在驱动构件60的第二轴向部分65上。精确地说这里,驱动构件60的第二轴向部分65压配合到另一个滚动轴承80的内圈中。
[0091]
如图4和图5中可见,此滚动轴承80容纳在空腔84中,这里是在空腔84的第三圆柱形部分87中。滚动轴承80的外径这里对应(实际上等于)第三圆柱形部分的直径(第六直径),使得滚动轴承80可以在第三圆柱形部分87内移动(通过沿着驱动构件60的轴线、即这里是输出轴58的轴线平移)。
[0092]
驱动构件60因此可旋转地安装在构架8中(围绕驱动构件60的轴线、这里对应于输出轴的轴线旋转)。
[0093]
螺旋弹簧83插置在空腔84的端壁81(即,这里为第三圆柱形部分的端壁)与滚动轴承80(这里精确地为滚动轴承80的外圈)之间。
[0094]
在本实施例中,在螺旋弹簧83与滚动轴承80之间还插置有环89。环89的圆形边缘(指向滚动轴承80的圆形边缘)仅接触滚动轴承80的外圈,这确保了被压缩的螺旋弹簧83产生的力仅施加在滚动轴承80的外圈上,而不施加在滚动轴承80的内圈上(这会阻碍控制构件60的旋转)。
[0095]
当螺旋弹簧83被压缩在端壁81与滚动轴承80之间时,螺旋弹簧83将包括驱动构件60和滚动轴承78、80的组件推向马达54直到滚动轴承76邻接抵靠壁82为止。
[0096]
因此,驱动构件60相对于构架8沿输出轴58的轴线(这里与驱动构件60的轴线相同)保持在预定的轴向位置。
[0097]
螺旋弹簧83可以例如被选择为沿着输出轴58的轴线施加比驱动构件60施加在控制构件62上以驱动控制构件62运动的力更大的偏置力。
[0098]
控制构件62的运动(这里为旋转,产生柱面透镜52的相同旋转)因此可以通过驱动构件60(其自身由马达54驱动)的对应运动来精确控制。因此改进了由柱面透镜52沿着透镜轴线x提供的光焦度(这里是柱面矫正)的控制。