1.本发明涉及一种摄像头模组及其闭环控制方法。
背景技术:
2.现有摄像头模组通常通过马达带动镜头组件实现自动对焦,所述马达内部设置有霍尔磁石,用于驱动所述马达运动的芯片上设置有霍尔传感器,该霍尔传感器用于感应霍尔磁石的磁通量变化,从而得到霍尔磁石的位置信息,即相当于镜头组件的位置信息,实现马达运动的闭环控制,其闭环控制行程与对应的霍尔磁石的高度有关,例如1500微米的行程至少需要2500微米高度的霍尔磁石才能实现全行程的闭环控制。
3.随着便携式电子设备小型化的发展,摄像头模组的厚度逐渐减小,马达高度受到限制。因此,在马达设计高度一定的情况下,超大行程(例如,1000微米以上)的马达难以使用较小的霍尔磁石进行全行程的闭环控制,造成摄像头模组的整体性能和实际应用体验下降。
技术实现要素:
4.本发明的目的在于提供一种摄像头模组及其闭环控制方法,在较小的马达高度下实现全行程的闭环控制,降低模组厚度,保证模组性能,满足小型化便携式电子设备的需求。
5.基于以上考虑,本发明的一方面提供一种摄像头模组,包括:马达,所述马达内设置有霍尔磁石;用于驱动所述马达运动的芯片,所述芯片上设置有至少两个霍尔传感器,每个霍尔传感器分别与所述霍尔磁石感应以反馈马达全行程中的一部分子行程。
6.优选的,所述至少两个霍尔传感器在所述芯片上沿马达运动方向呈一字排列,相邻两个霍尔传感器负责反馈的子行程之间有5%-50%的重叠部分。
7.优选的,所述马达全行程大于等于1000微米。
8.优选的,所述霍尔传感器与所述霍尔磁石相对设置。
9.本发明的另一方面提供一种摄像头模组的闭环控制方法,包括如下步骤:提供马达,所述马达内设置有霍尔磁石;提供用于驱动所述马达运动的芯片,所述芯片上设置有至少两个霍尔传感器,每个霍尔传感器分别与所述霍尔磁石感应以反馈马达全行程中的一部分子行程;对所有霍尔传感器的反馈值进行处理,实现对马达全行程的闭环控制。
10.优选的,所述对所有霍尔传感器的反馈值进行处理的步骤包括:s1:控制马达进行全行程运动,收集马达内的霍尔磁石的绝对位置信息;s2:记录每个霍尔传感器在全行程对应的反馈值;s3:根据霍尔磁石的绝对位置信息,选择对应霍尔传感器的子行程的线性区域,确定每个霍尔传感器对应的子行程范围;s4:分别对每个子行程的霍尔传感器反馈值和子行程对应关系进行线性校准;s5:对线性校准后的子行程对应关系进行整合拼接,从而建立马达全行程与霍尔磁石绝对位置信息的对应关系,实现闭环控制功能。
11.优选的,所述至少两个霍尔传感器在芯片上沿马达运动方向呈一字排列,相邻两
个霍尔传感器负责反馈的子行程之间有5%-50%的重叠部分。
12.优选的,所述马达全行程大于等于1000微米。
13.优选的,所述霍尔传感器与所述霍尔磁石相对设置。
14.本发明的摄像头模组及其闭环控制方法,通过在用于驱动马达运动的芯片上设置有至少两个霍尔传感器,每个霍尔传感器分别与马达内的霍尔磁石感应以反馈马达全行程中的一部分子行程,对所有霍尔传感器的反馈值进行处理,以实现对马达全行程的闭环控制,从而可以在较小的马达高度下实较大的全行程的闭环控制,降低模组厚度,保证模组性能,满足小型化便携式电子设备的需求。
附图说明
15.通过参照附图阅读以下所作的对非限制性实施例的详细描述,本发明的其它特征、目的和优点将会变得更明显。
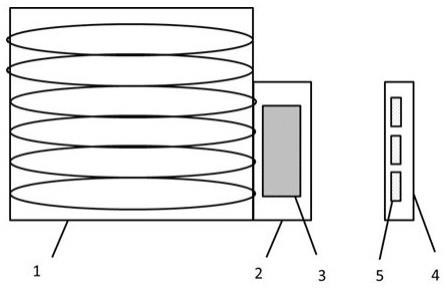
16.图1为本发明的摄像头模组的结构示意图;图2为本发明中对所有霍尔传感器的反馈值进行处理的步骤流程图;图3-图5为本发明中对所有霍尔传感器的反馈值进行处理的过程示意图。
17.在图中,贯穿不同的示图,相同或类似的附图标记表示相同或相似的装置(模块)或步骤。
具体实施方式
18.为解决上述现有技术中的问题,本发明提供一种摄像头模组及其闭环控制方法,通过在用于驱动马达运动的芯片上设置有至少两个霍尔传感器,每个霍尔传感器分别与马达内的霍尔磁石感应以反馈马达全行程中的一部分子行程,对所有霍尔传感器的反馈值进行处理,以实现对马达全行程的闭环控制,从而可以在较小的马达高度下实较大的全行程的闭环控制,降低模组厚度,保证模组性能,满足小型化便携式电子设备的需求。
19.在以下优选的实施例的具体描述中,将参考构成本发明一部分的所附的附图。所附的附图通过示例的方式示出了能够实现本发明的特定的实施例。示例的实施例并不旨在穷尽根据本发明的所有实施例。可以理解,在不偏离本发明的范围的前提下,可以利用其他实施例,也可以进行结构性或者逻辑性的修改。因此,以下的具体描述并非限制性的,且本发明的范围由所附的权利要求所限定。
20.下面结合具体实施例对本发明进行详细阐述。
21.图1示出本发明的摄像头模组的结构,该摄像头模组包括:镜头组件1;用于带动所述镜头组件1实现伸缩运动的马达2,所述马达2内设置有霍尔磁石3;用于驱动所述马达2运动的芯片4,所述芯片4上设置有至少两个霍尔传感器5,在此示出为三个霍尔传感器5,优选的,本实施例中的三个霍尔传感器5与霍尔磁石3相对设置,并且在芯片4上沿马达2的运动方向(即镜头组件1的光轴方向)呈一字排列,其中,每个霍尔传感器5分别与霍尔磁石3感应以反馈马达2全行程中的一部分子行程。
22.相应的,本发明提出一种摄像头模组的闭环控制方法,包括如下步骤:提供马达2,所述马达2内设置有霍尔磁石3;提供用于驱动所述马达2运动的芯片4,所述芯片4上设置有至少两个霍尔传感器5,每个霍尔传感器5分别与所述霍尔磁石3感应以反馈马达2全行程中
的一部分子行程;对所有霍尔传感器5的反馈值进行处理,实现对马达2全行程的闭环控制。
23.具体的,如图2所示,所述对所有霍尔传感器5的反馈值进行处理的步骤包括:s1:控制马达2进行全行程运动,收集马达2内的霍尔磁石3的绝对位置信息;s2:记录每个霍尔传感器5在全行程对应的反馈值,例如磁场强度,分别得到三条马达行程与磁场强度的关系曲线51、52、53(如图3所示);s3:根据霍尔磁石3的绝对位置信息,选择对应霍尔传感器5的子行程的线性区域,确定每个霍尔传感器5对应的子行程范围(如图4所示);s4:分别对每个子行程的霍尔传感器反馈值和子行程对应关系进行线性校准;s5:优选的,相邻两个霍尔传感器5负责反馈的子行程之间可以有5%-50%的重叠部分,以便通过后续算法对线性校准后的子行程对应关系进行整合拼接,从而建立马达全行程与霍尔磁石绝对位置信息的对应关系(如图5所示),实现对于马达2全行程的闭环控制功能。
24.根据本发明的摄像头模组及闭环控制方法,采用1400微米高度的霍尔磁石,在三个霍尔传感器分别负责反馈700微米子行程的情况下,去除相邻两个霍尔传感器之间300微米的重叠部分,即可实现1500微米全行程的闭环控制。
25.因此,本发明的摄像头模组及闭环控制方法可以在较小的马达高度下实较大的全行程的闭环控制,降低模组厚度,保证模组性能,满足小型化便携式电子设备的需求,尤其适用于具有1000微米以上超大行程马达的摄像头模组。
26.本领域技术人员可以理解,霍尔传感器的数量及其对应的子行程范围可以根据马达行程、模组厚度、马达高度等实际需要进行设置,只需满足芯片上设置至少两个霍尔传感器分别与马达内的霍尔磁石感应以反馈马达全行程中的一部分子行程,即可用于实现本发明的摄像头模组及其闭环控制方法。
27.综上所述,本发明的摄像头模组及其闭环控制方法,通过在用于驱动马达运动的芯片上设置有至少两个霍尔传感器,每个霍尔传感器分别与马达内的霍尔磁石感应以反馈马达全行程中的一部分子行程,对所有霍尔传感器的反馈值进行处理,以实现对马达全行程的闭环控制,从而可以在较小的马达高度下实较大的全行程的闭环控制,降低模组厚度,保证模组性能,满足小型化便携式电子设备的需求。
28.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论如何来看,均应将实施例看作是示范性的,而且是非限制性的。此外,明显的,“包括”一词不排除其他元素和步骤,并且措辞“一个”不排除复数。装置权利要求中陈述的多个元件也可以由一个元件来实现。第一,第二等词语用来表示名称,而并不表示任何特定的顺序。