一种焦罐台车的aps自动对位装置
技术领域
1.本实用新型涉及一种具有防撞提醒功能的焦罐台车aps自动对位装置,属于焦炭生产设备技术领域。
背景技术:
2.在干熄焦生产过程中,由干熄焦车带着焦罐往返运行于干熄焦提升井架与焦炉各碳化室焦侧,负责红焦的地面水平运输,而焦罐的垂直提升则由提升机完成,aps液压夹紧装置是连接二者的重要设备,其工作原理是干熄车司机驾驶带焦罐的熄焦车行驶到提升井架下方,进行初对位后将熄焦车对应的焦罐台车定位在aps夹臂中心线
±
100mm以内范围,干熄车司机发送接空罐或送满罐信号后,aps液压装置启动并夹紧焦罐台车上的定位板,最终将焦罐台车的定位精度提高至
±
10mm范围内,之后提升机开始运行,在提升过程中提升吊钩向下闭合挂住焦罐吊耳,从而将焦罐安全地送入垂直提升轨道。
3.干熄焦aps液压夹紧装置是干熄焦红焦输送系统中重要的安全保证设备,其主要作用是将初对位完成的干熄车进行强制定位,保证提升机在提升焦罐的过程中不发生偏斜,使提升机吊钩安全地挂住焦罐吊耳,从而将焦罐提升至干熄炉顶部进行装焦作业。但在实际生产过程中,由于干熄车司机看不到aps夹臂4的状态,导致aps夹臂4经常被焦罐台车碰撞而损坏,从而严重影响生产的正常进行。因此如何防止aps夹臂4被焦罐台车碰撞就成为有关技术人员面临的课题。
技术实现要素:
4.本实用新型的目的在于针对现有技术之弊端,提供一种焦罐台车的aps自动对位装置,以防止aps夹臂4被焦罐台车碰撞而损坏,保证生产顺利进行。
5.为实现上述目的,本实用新型采用如下技术方案:
6.一种焦罐台车的aps自动对位装置,包括固定在焦罐台车侧部的定位板、对称设置在定位板前后侧的两个aps夹臂和两个液压缸以及报警装置,两个aps夹臂的上端夹住定位板,下端与地基上的支架铰接,两个液压缸的缸体与地基活动连接,二者的活塞杆分别与两个aps夹臂的中部铰接,所述报警装置包括接近开关、驱动电路和报警器,所述接近开关通过支架固定在地基上并与aps夹臂的松开位置相对应,所述报警器安装在干熄车司机室的侧前方,所述驱动电路的输入端与接近开关连接,输出端与报警器连接。
7.上述焦罐台车的aps自动对位装置,所述aps夹臂上设有与接近开关相对应的触发块。
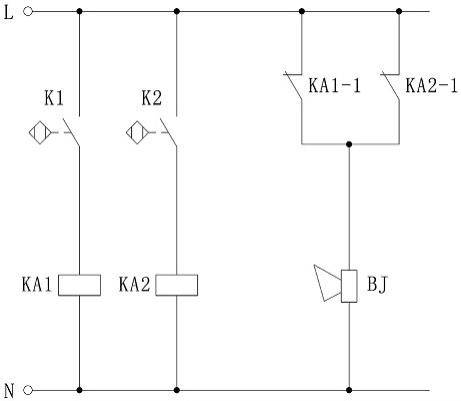
8.上述焦罐台车的aps自动对位装置,所述驱动电路包括继电器,所述继电器的控制线圈通过接近开关的常开触点与电源连接,报警器通过继电器的常闭触点与电源连接。
9.上述焦罐台车的aps自动对位装置,所述接近开关和继电器均设置两个,两个接近开关分别与两个aps夹臂相对应,两个继电器的控制线圈分别通过两个接近开关的常开触点与电源连接,两个继电器的常闭触点并联连接后串接在报警器的供电回路中。
10.上述焦罐台车的aps自动对位装置,所述报警器为声光报警器。
11.上述焦罐台车的aps自动对位装置,所述接近开关为光电式接近开关。
12.本实用新型利用接近开关检测aps夹臂的位置,只要aps夹臂不在松开位置即通过报警器发出防撞提醒信息,提示干熄车司机不要启动熄焦车,这样就可有效防止aps夹臂被焦罐台车碰撞而损坏,保证干熄焦生产的顺利进行。
附图说明
13.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
14.图1是本实用新型接近开关的安装示意图,其中图1(a)是aps夹臂夹紧状态;图1(b)是aps夹臂打开状态;
15.图2是防撞报警装置的电原理图。
16.图中各标号如下:1、焦罐台车,2、定位板,3、触发块,4、aps夹臂,5、液压缸,k1、第一接近开关,k2、第二接近开关,ka1、第一继电器,ka1-1、第一继电器常闭触点,ka2、第二继电器,ka2-1、第二继电器常闭触点,bj、报警器。
具体实施方式
17.本实用新型可有效预警aps的动作状态,为司机操作提供清晰反馈,大大降低焦罐台车撞击aps夹臂4的事故率,保护aps液压装置的运行安全。
18.在干熄车运行过程中,aps夹臂4突然抬起是导致撞击事故发生的直接原因,本实用新型在靠近干熄车头位置,增设一个声光报警器,当aps开始动作和已经处于夹紧状态时,触发声光报警器报警,提醒司机不要动车,只有当该警报解除时方可动车。
19.参看图1和图2,本实用新型主要包括固定在焦罐台车侧部的定位板2、两个由液压缸5驱动的aps夹臂4和报警装置,其中报警装置包括两个接近开关(第一接近开关k1和第二接近开关k2)、驱动电路和报警器bj,驱动电路包括第一继电器ka1和第二继电器ka2。在两个aps夹臂4靠近其下端铰接轴1/3-1/2处各自焊接φ10mm圆柱状的触发块3,作为接近开关的感应阻挡物。同时分别在两个aps夹臂4的松开定位板2的位置固定安装相应的接近开关。报警器bj安装在干熄车司机室的侧前方,接近开关和报警器bj与驱动电路连接。当aps自动对位装置接收到外部命令后,液压缸油压升高,促使aps夹臂4开始动作,直到两个aps夹臂4夹紧定位板2。此时aps夹臂4已经将焦罐台车调整到合适的位置,等待提升机动作。
20.aps夹臂4在未运行前处于松开位置, 干熄车以微速接近停车区域,直至检测到初对位信号,通过一对在
±
100mm范围都能感应到的“对位装置动作”传感器向车载plc控制系统发出持续指令信号,表示初对位完成,司机将车辆停稳后,发送“接空罐/送满罐”命令,对位装置接收到来自车载plc控制系统的动作指令信号后aps夹臂4开始动作,此时aps夹臂4离开接近开关,接近开关的常开触点断开,继电器的控制线圈失电,其常闭触点闭合,报警器bj开始预警。两个aps夹臂4夹紧定位板2后提升机开始完成接收到的“接空罐/送满罐”任务。任务完成以后中控发命令,aps夹臂4开始松开动作,完成松开动作后,触发块3到达接近开关的位置,两个接近开关的常开触点闭合,两继电器得电动作,其常闭触点断开,报警器bj停止报警,干熄车可以自由走行。即aps夹臂4只要不在打开到位状态,报警器bj就发出声光报警信号,以提醒司机禁止干熄车走行。报警器bj应安装在靠近干熄车司机室的部位,确
保司机可以清晰地听到报警声音或看到报警灯闪烁。
21.本实用新型采用两个继电器和两个接近开关,只有当两个aps夹臂4均松开到位时,报警器bj才能停止报警,而一旦aps夹臂4开始动作,只要有一个aps夹臂4离开松开位置,报警器bj就会得电,并开始报警,这样就提高了报警装置的可靠性。
22.本实用新型的接近开关采用光电式接近开关,型号为:k15y-2200-m30,工作电压范围为:20-250vac。最大电流不超过4a,常开触点,感应距离为15mm。
23.本装置可有效预警aps夹臂的动作状态,为司机操作提供清晰反馈,大大降低干熄车撞击aps夹臂的事故率,保护干熄车和aps夹臂的安全,有助于生产节奏的稳定,可提高干熄焦生产的两大主要指标——干熄率和产汽率的抗外界因素干扰能力,保障高炉用料供应和发电节能设备正常运转。