1.本发明涉及混凝土领域,尤其涉及一种钢壳混凝土智能浇筑台车。
背景技术:
2.目前,混凝土浇筑指的是将混凝土浇筑入模直至塑化的过程,在土木建筑工程中把混凝土等材料到模子里制成预定形体,混凝土浇筑时,混凝土的自由高度不宜超过2m,当超过3m时应采取相应措施。跨江通道是集超宽海底隧道、超大跨桥梁、深水人工岛、水下互通"四位"一体的集群工程,规模空前,建设条件异常复杂,综合技术难度再上新高,需要采用“三明治”结构钢壳混凝土沉管,即钢壳混凝土沉管。
3.但是,现有的钢壳混凝土浇筑存在以下缺陷:
4.1、市面上的钢壳混凝土在浇筑过程中,浇筑调速的速度无法适应性调整。而钢壳沉管混凝土具有大断面、免振捣、自填充的特点,若混凝土流动性不足,则混凝土很难完全填充钢壳,形成局部空洞;若粘聚性不足,流动性稍大,则容易造成浆骨分离,同时,浇筑速率过快,混凝土中气泡未能及时排出,容易在表面聚集,在钢壳与混凝土结合面形成大面积气孔和蜂窝麻面。
5.2、市面上的钢壳混凝土在浇筑过程中没有自动寻位功能,需要人工指挥或目测台车移动到浇筑点进行隔仓浇筑,这种方式无法实现自动化,重复、多次枯燥的操作容易受到工人情绪影响,容易造成浇筑偏差。
技术实现要素:
6.为了克服现有技术的不足,本发明的目的之一在于提供一种钢壳混凝土智能浇筑台车,其能解决浇筑调速的速度无法适应性调整的问题。
7.本发明的目的之一采用如下技术方案实现:
8.一种钢壳混凝土智能浇筑台车,包括台车料斗组件、台车架体、纵梁轨道及控制单元,所述台车料斗组件包括料斗本体、横移小车、重量传感器、与料斗本体连接的衔接管路、阀门控制装置,所述料斗本体安装于所述横移小车,所述重量传感器设置于所述料斗本体、横移小车之间并检测所述料斗本体的重量,所述阀门控制装置包括安装于衔接管路上的阀门主体、与阀门主体连接的阀门控制器;所述台车架体设置有横移轨道,所述台车架体滚动安装于所述纵梁轨道,所述横移小车滚动安装于所述横移轨道,所述控制单元分别与所述重量传感器、阀门控制器连接,所述控制单元根据重量传感器传递的重量信息进而控制阀门控制器,使所述阀门控制器调节所述阀门主体的开关状态及开关程度;所述台车架体沿所述纵梁轨道上纵向移动,所述横移小车带动所述料斗本体沿所述横移轨道横向移动;所述的钢壳混凝土智能浇筑台车还包括监视台车行走位置的摄像头,控制单元根据摄像头反馈台车位置信息分析并指导台车自动寻找浇筑点。台车到达浇筑点后,自动下放浇筑管,并采用控制单元、重量传感器、阀门控制器的配合进行浇筑速度的适应性调整,进而解决了浇筑速度带来的浆骨分离、气孔等问题。
9.进一步地,所述料斗本体设置有侧部安装端,所述重量传感器的上下两侧分别抵触于所述侧部安装端、横移小车。
10.进一步地,所述横移小车包括台车驱动件、上部行车滚轮,所述台车驱动件带动所述上部行车滚轮滚动。
11.进一步地,所述台车料斗组件还包括插接件,所述插接件插接于所述侧部安装端、横移小车。
12.进一步地,所述衔接管路的下侧连接有第一连通管路。
13.进一步地,所述台车料斗组件还包括浇筑管路,所述浇筑管路与所述第一连通管路连接。
14.进一步地,所述台车料斗组件还包括提升滚轮、提升组件,所述提升滚轮固定于所述浇筑管路的上端,所述提升组件带动所述提升滚轮上下移动。
15.进一步地,所述提升组件包括提升电机、提升连接线,所述提升电机的端部设置有主动轮,所述提升连接线绕经所述主动轮、提升滚轮。
16.进一步地,所述的钢壳混凝土智能浇筑台车还包括摄像头,所述摄像头包括的用于获取隔仓浇筑位置的定位拍照组件,所述定位拍照组件与控制单元连接,所述定位拍照组件获取待浇筑隔仓与浇筑管路之间的位置偏差信息,控制单元根据位置偏差信息驱动台车料斗组件自动寻位到隔仓上方进行浇筑。
17.进一步地,所述台车架体包括横梁组件、安装于横梁组件下侧的支腿组件、与支腿组件固定连接的行走机构,所述行走机构包括横梁驱动件、下部行车滚轮,所述横梁驱动件带动所述下部行车滚轮沿所述纵梁轨道移动。相比现有技术,本发明的有益效果在于:
18.所述台车料斗组件包括料斗本体、重量传感器、与料斗本体连接的衔接管路、阀门控制装置,所述料斗本体安装于所述横移小车,所述重量传感器设置于所述料斗本体、横移小车之间并检测所述料斗本体的重量,所述阀门控制装置包括安装于衔接管路上的阀门主体、与阀门主体连接的阀门控制器;所述台车架体设置有横移轨道,所述横移小车滚动安装于所述横梁轨道,所述台车架体滚动安装于所述纵移轨道,所述控制单元分别与所述重量传感器、阀门控制器连接,所述控制单元根据重量传感器传递的重量信息进而控制阀门控制器,使所述阀门控制器调节所述阀门主体的开关状态及开关程度。采用所述控制单元、重量传感器、阀门控制器的配合进行浇筑速度的适应性调整,进而解决了浇筑速度带来的浆骨分离、气孔等问题。
19.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
20.图1为本发明钢壳混凝土智能浇筑台车中一较佳实施例的结构图;
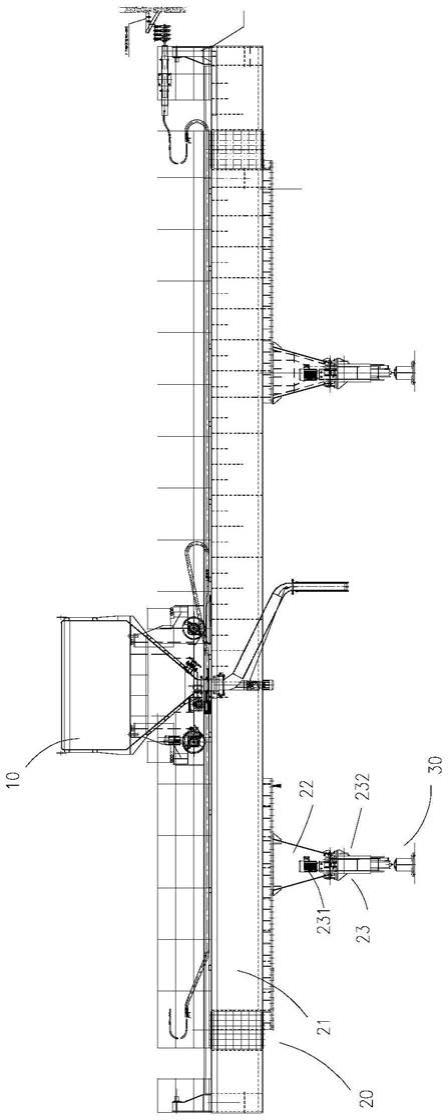
21.图2为图1所示钢壳混凝土智能浇筑台车的结构图;
22.图3为图1所示钢壳混凝土智能浇筑台车的另一结构图;
23.图4为图1所示钢壳混凝土智能浇筑台车的又一结构图。
24.图中:10、台车料斗组件;11、料斗本体;111、侧部安装端;12、横移小车;121、上部
行车滚轮;122、台车驱动件;13、重量传感器;14、插接件;15、衔接管路;16、阀门控制装置;161、阀门主体;162、阀门控制器;17、第一连通管路;171、浇筑管路;172、提升滚轮;18、提升组件;181、提升电机;182、提升连接线;20、台车架体;21、横梁组件;22、支腿组件;23、行走机构;231、横梁驱动件;232、下部行车滚轮;30、纵梁轨道。
具体实施方式
25.下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
26.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
27.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
28.请参阅图1-4,一种钢壳混凝土智能浇筑台车,包括台车料斗组件10、台车架体20、纵梁轨道30及控制单元,所述台车料斗组件10包括料斗本体11、横移小车12、重量传感器13、与料斗本体11连接的衔接管路15、阀门控制装置16,所述料斗本体11安装于所述横移小车12,所述重量传感器13设置于所述料斗本体11、横移小车12之间并检测所述料斗本体11的重量,所述阀门控制装置16包括安装于衔接管路15上的阀门主体161、与阀门主体161连接的阀门控制器162;所述台车架体20设置有横移轨道,所述台车架体20滚动安装于所述纵梁轨道30,所述横移小车12滚动安装于所述横移轨道,所述控制单元分别与所述重量传感器13、阀门控制器162连接,所述控制单元根据重量传感器13传递的重量信息进而控制阀门控制器162,使所述阀门控制器162调节所述阀门主体161的开关状态及开关程度。采用所述控制单元、重量传感器13、阀门控制器162的配合进行浇筑速度的适应性调整,进而解决了浇筑速度带来的浆骨分离、气孔等问题。智能浇筑台车通过自身具备的自动寻位和自动精准调速可实现自动化浇筑,减少人为因素干扰,偏差度低,减少浆骨分离、气孔等问题。因此,智能浇筑台车可实现高质量混凝土浇筑。
29.具体的,台车架体沿纵梁轨道上纵向移动,料斗本体在台车架体的轨道上横向移动;钢壳混凝土智能浇筑台车还包括监视台车行走位置的摄像头,控制单元根据摄像头反馈台车位置信息分析并指导台车自动寻找浇筑点,简称自动寻位。自动寻位基于台车架体在行程编码器和控制单元指导下,横移小车12移动到浇筑点附近;摄像头再监视与料斗本体11的下料管和浇筑口两种圆心的平面位置偏差,控制单元分析偏差偏差距离是否《10mm;偏差合格,则完成自动寻位。台车到达浇筑点后,自动下放浇筑管,并采用控制单元、重量传感器、阀门控制器的配合进行浇筑速度的适应性调整,进而解决了浇筑速度带来的浆骨分离、气孔等问题。
30.具体的,浇筑速度的大小由阀门主体161打开的大小程度决定,因此,混凝土浇筑调速是通过控制单元控制阀门控制器162,在本技术中阀门控制器162可采用电机,采用往复驱动闸阀的方式微调开口度来实现的。具体的,浇筑速度等于单位时间内混凝土的重量差,再除以混凝土容重,即:v=δt/δt/ρ,其中:
31.v-混凝土下料速度,即浇筑速度;
32.δt-采集周期内,料斗混凝土重量差;
33.δt-两次采集的时间间隔;
34.ρ-混凝土容重;
35.在实际使用时,智能浇筑台车调速时,每20s采集一次料斗重量信息。plc控制系统根据反馈回来的重量差信号计算浇筑速度是否达标,否则将驱动闸阀电机,调整开口度,达到智能调速的目的。
36.优选的,所述料斗本体11设置有侧部安装端111,所述重量传感器13的上下两侧分别抵触于所述侧部安装端111、横移小车12。
37.优选的,所述横移小车12的下部设置有台车驱动件122、上部行车滚轮121,所述台车驱动件122带动所述上部行车滚轮121沿所述横移轨道滚动。所述台车料斗组件10还包括插接件14,所述插接件14插接于所述侧部安装端111、横移小车12。采用所述插接件14进行侧部安装端111、横移小车12的安装,进而安装重量传感器13。
38.优选的,所述衔接管路15的下侧连接有第一连通管路17。所述台车料斗组件10还包括浇筑管路171,所述浇筑管路171与所述第一连通管路17连接。所述台车料斗组件10还包括提升滚轮172、提升组件18,所述提升滚轮172固定于所述浇筑管路171的上端,所述提升组件18通过收放提升连接线182,提升浇筑管路171上下移动(提升滚轮172起转向作用)。具体的,使用时第一连通管路17与浇筑管路171呈钝角,浇筑管路171与衔接管路15均呈竖直状。
39.优选的,所述提升组件18包括提升电机181、提升连接线182,所述提升电机181的端部设置有主动轮,所述提升连接线182绕经所述主动轮、提升滚轮172。设置提升组件18的目的在于提升浇筑管路171,进而在浇筑开始或结束时减轻工人的压力,提高浇筑的灵活度。
40.优选的,所述台车架体20包括横梁组件21、安装于横梁组件21下侧的支腿组件22、与支腿组件22固定连接的行走机构23,所述行走机构23包括所述横梁驱动件、231下部行车滚轮232,所述横梁驱动件231带动所述下部行车滚轮232沿所述纵梁轨道30移动。具体的,所述重量传感器13的量程为10-20t,具体的,型号为rcfzc。整个装置结构紧凑,结构新颖,设计巧妙,适用性强,便于推广。
41.优选的,所述的钢壳混凝土智能浇筑台车还包括摄像头,所述摄像头包括的用于获取隔仓浇筑位置的定位拍照组件,所述定位拍照组件与控制单元连接,所述定位拍照组件获取待浇筑隔仓与浇筑管路之间的位置偏差信息,控制单元根据位置偏差信息进行分析并驱动台车料斗组件自动寻位到隔仓上方进行浇筑(即通过视频识别原理识别两圆心,再对比两圆心的平面位置偏差)。在具体应用过程中,隔仓上设置有圆形的浇筑孔,当浇筑管路的轴线与浇筑孔的圆心重合时,符合浇筑条件,控制单元才会驱动钢壳混凝土智能浇筑台车进行浇筑采用这种方式可以自动寻位浇筑,需要浇筑时,控制单元分析位置偏差信息
进行移动,移动到位后浇筑一段时间,当隔仓浇筑完毕时,自动寻位到下一个隔仓,当需要重新补充混凝土物料时,自动寻位到接料点进行补充,补充完毕后自动寻位到浇筑点。
42.具体的,所述定位拍照组件的型号为bfs-pge-23s3c-c。
43.具体的,定位拍照组件获取的位置偏差信息为:浇筑孔的圆心与浇筑管路的轴线之间的位置偏差,进而提高自动寻位的精准度。
44.上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所要求保护的范围。