1.本发明涉及蛇形机器人的技术领域,具体地,涉及基于蛇形机器人和软体抓手的复杂环境安全抓取系统。
背景技术:
2.复杂狭窄环境安全抓取系统的关键技术是携带末端抓手安全抵达、碰撞检测和安全抓取。携带末端抓手运动可以依靠传统的工业机械臂实现,但工业机械臂的缺点是:自由度较少,无法实现灵活的运动,在复杂狭窄的环境内难以有效避开障碍。碰撞检测可以依靠压力传感或距离感知(如视觉传感、超声传感等)实现。但压力传感器依靠与障碍物的直接接触进行感知,因此传统的刚性压力传感器用于精密器件环境中进行碰撞检测时,可能会对精密器件造成损伤。而距离感知的缺陷在于:感知设备通常为电子器件,较为精密、脆弱和复杂,难以应用于微光或辐射等各种不良环境,且刚性结构存在安全隐患。安全抓取可通过各种刚性抓手或软体抓手实现。由于抓取过程中,抓手通常需要与环境空间进行接触,因此传统的刚性抓手的缺陷在于:抓取时会对含有精密器件的环境造成损伤。
3.在公开号为cn111702748a的专利文献中公开了一种适用于特殊环境下抓取的柔性并联机构,该柔性并联机构通过伺服电机分别控制上下两个柔性杆件的长度和变形,进一步驱动末端执行器的移动,同时末端执行器能够360
°
自由旋转。
4.因此,需要提出一种技术方案以改善上述技术问题。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种基于蛇形机器人和软体抓手的复杂环境安全抓取系统。
6.根据本发明提供的一种基于蛇形机器人和软体抓手的复杂环境安全抓取系统,包括蛇形机器人、软体抓手、柔性传感器以及控制器;
7.所述控制器与蛇形机器人、软体抓手和柔性传感器均通信连接。
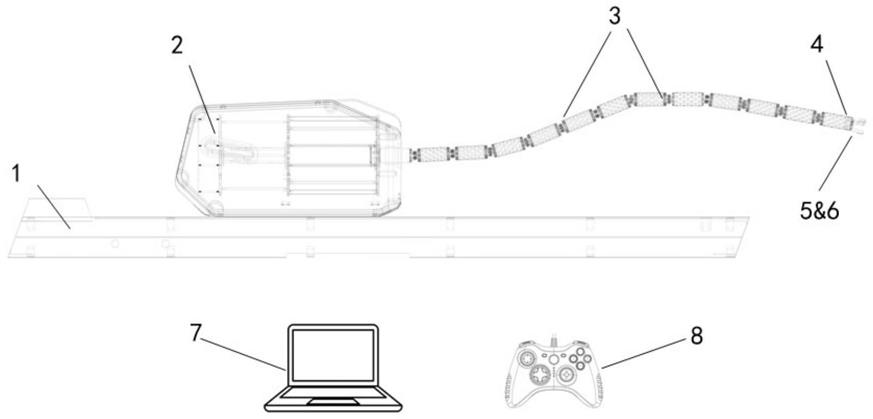
8.优选地,所述蛇形机器人包括进给平台1、驱动装置2和蛇形臂3,所述蛇形机器人为软体抓手提供末端跟随运动。
9.优选地,所述软体抓手包括连接装置4和多根软体手指5,所述软体抓手进行安全抓取操作。
10.优选地,所述柔性传感器6获取压力传感信息,对障碍物进行碰撞感知。
11.优选地,所述控制器包括工控机7和操作手柄8,所述控制器对蛇形机器人的运动、软体抓手的抓取操作和柔性传感器的碰撞感知进行计算和控制。
12.优选地,通过操作手柄8发送运动指令到工控机7,工控机7对控制指令进行解析计算,并分别对进给平台1和驱动装置2发出运动控制信号,蛇形臂3的末端按照运动指令进行移动。
13.优选地,所述工控机7基于末端跟随控制算法进行计算,对进给平台1和驱动装置2
发出运动控制信号,蛇形臂3的臂体部分沿着末端运动的轨迹进行跟随运动。
14.优选地,所述蛇形臂3进行运动的过程中,安装在软体手指5末端的柔性传感器6循环进行碰撞检测;当与障碍物发生碰撞时,柔性传感器6向工控机7发出停止运动信号。
15.优选地,当蛇形臂3运动到指定位置时,操作手柄8发送控制指令到工控机7,工控机7发送控制信号到软体手指5进行抓取操作。
16.优选地,所述工控机7对进给平台1和驱动装置2发出运动控制信号,控制蛇形臂3沿原轨迹无碰撞地返回。
17.与现有技术相比,本发明具有如下的有益效果:
18.1、本发明通过采用柔性传感器配合软体手指的碰撞检测方式,解决了距离传感器的误感知和刚性结构在精密环境中安全性不足的问题,增加了碰撞检测过程的可靠性和安全性;
19.2、本发明通过采用蛇形机器人作为运动载体的方式,解决了复杂狭窄空间难以进入的问题;
20.3、本发明通过采用末端跟随的运动控制方式,解决了运动过程中,即使末端无碰撞,臂体仍可能发生碰撞的问题,增加了运动过程中安全性;
21.4、本发明通过采用软体抓手的方式,解决了在精密场景中进行抓取操作对精密器件的破坏问题,增加了抓取过程中的安全性。
附图说明
22.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
23.图1为本发明的整体图;
24.图2为本发明软体抓手及柔性传感器示意图。
25.其中:
26.进给平台1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
软体手指5
27.驱动装置2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
柔性传感器6
28.蛇形臂3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
工控机7
29.连接装置4
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
操作手柄8
具体实施方式
30.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
31.本发明提供一种基于蛇形机器人和软体抓手的复杂环境安全抓取系统,在蛇形机器人末端安装带有碰撞检测功能的软体抓手,融合蛇形机器人本体的末端跟随运动策略,实现复杂狭窄精密环境的安全抓取。
32.一种基于蛇形机器人和软体抓手的复杂环境安全抓取系统,包括蛇形机器人、软体抓手、柔性传感器以及控制器,控制器与蛇形机器人、软体抓手和柔性传感器均通信连
接。
33.蛇形机器人包括进给平台1、驱动装置2和蛇形臂3,为软体抓手提供末端跟随运动;软体抓手包括连接装置4和多根软体手指5,实现安全抓取操作;柔性传感器6获取压力等传感信息,实现对障碍物的碰撞感知;控制器包括工控机7和操作手柄8,对蛇形机器人的运动、软体抓手的抓取操作和柔性传感器的碰撞感知进行计算和控制。
34.通过操作手柄8发送运动指令到工控机7,工控机7对控制指令进行解析计算,并分别对进给平台1、驱动装置2发出运动控制信号,使得蛇形臂3的末端按照运动指令进行移动。
35.工控机7基于末端跟随控制算法进行计算,对进给平台1、驱动装置2发出运动控制信号,使得蛇形臂3的臂体部分沿着末端运动的轨迹进行跟随运动。因此只要蛇形臂末端不发生碰撞,则蛇形臂的后续部分同样不会发生碰撞。
36.蛇形臂3进行运动的过程中,安装在软体手指5末端的柔性传感器6循环进行碰撞检测。当与障碍物发生碰撞时,柔性传感器6向工控机7发出停止运动信号,避免刚性碰撞的发生。
37.当蛇形臂3运动到指定位置时,操作手柄8发送控制指令到工控机7,工控机7发送控制信号到软体手指5进行抓取操作。
38.工控机7对进给平台1、驱动装置2发出运动控制信号,控制蛇形臂3沿原轨迹无碰撞地返回。
39.本发明通过采用柔性传感器配合软体手指的碰撞检测方式,解决了距离传感器的误感知和刚性结构在精密环境中安全性不足的问题,增加了碰撞检测过程的可靠性和安全性;通过采用蛇形机器人作为运动载体的方式,解决了复杂狭窄空间难以进入的问题;通过采用末端跟随的运动控制方式,解决了运动过程中,即使末端无碰撞,臂体仍可能发生碰撞的问题,增加了运动过程中安全性;通过采用软体抓手的方式,解决了在精密场景中进行抓取操作对精密器件的破坏问题,增加了抓取过程中的安全性。
40.本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
41.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。