1.本发明涉及果蔬酵素发酵技术领域,具体地涉及一种有源腰部和上肢一体化助力外骨骼。
背景技术:
2.当前大多数的工厂、转运车间、建筑工地等等需要货物或者产品转运时,常需要工人搬运,长时间的搬运不仅对人体造成损伤,同时工作效率降低,并随着人工成本的提升,搬运的成本不断的增加。
3.专利公开号为cn201710709717.7的发明专利中,公开了一种上肢助力装置中,上肢助力外骨骼可以保证商品的安全搬运,也可以大大减轻搬运过程中手臂的劳动强度,具有成本低,操作方便等优点,但是在搬运货物的过程中仅有上臂的助力,仍然不能解决长时间工作时工作人员腰部带来的损伤,同时该发明为刚性结构,与人体结构相容性较差。
4.专利公开号为cn201911083616.9的发明专利中,公开了一种腰部助力外骨骼机器人,能够在人体弯腰过程中提供支撑力,实现弯腰助力,行走搬运时腰部运动的组件也不会对人体造成干扰,但是在搬运过程中,仅实现了腰部的助力,不能够实现对人体上肢的助力,长时间工作的话仍然会造成人体手臂的损伤。
5.因此,提供一种有源腰部和上肢一体化助力外骨骼,以解决现有技术中所存在的上述问题。
技术实现要素:
6.本发明的目的是提供一种有源腰部和上肢一体化助力外骨骼,以解决上述现有技术存在的问题,能够有效的提高搬运过程中对人体的助力效率,大大减少腰部和人体上肢的损伤,进而实现腰部和上肢的有效助力。
7.为实现上述目的,本发明提供了如下方案:
8.本发明提供一种有源腰部和上肢一体化助力外骨骼,包括:
9.穿戴模块,所述穿戴模块能够穿戴于人体上,所述穿戴模块包括连接在一起的背部穿戴模块、腰部穿戴模块和腿部穿戴模块;
10.驱动模块,所述驱动模块包括腿部驱动模块和上肢驱动模块,所述腰部穿戴模块与所述腿部穿戴模块通过所述腿部驱动模块进行连接,所述腿部驱动模块能够驱动所述腿部穿戴模块转动;所述上肢驱动模块安装于所述背部穿戴模块上,所述上肢驱动模块连接有搬运手套;
11.控制模块,所述控制模块与所述驱动模块连接。
12.优选的,所述腰部穿戴模块包括腰带,所述背部穿戴模块包括背板和两个背带,两个所述背带的底部分别与所述腰带的左右两侧连接,两个所述背带的顶部分别与所述背板的顶部左右两侧连接,所述背板的底部与所述腰带的后端中部连接;所述腰带的左右两侧均设置有一个腿部连接块,两个所述腿部连接块各通过一个所述腿部驱动模块与所述腿部
穿戴模块连接,所述腿部穿戴模块包括腿部连接板。
13.优选的,所述腰带的前端设置有卡扣。
14.优选的,每个所述腿部驱动模块均包括伺服电机,所述伺服电机安装于电机连接板上,所述电机连接板与所述腿部连接块连接;所述腿部连接板的顶部与所述伺服电机连接,所述伺服电机能够带动所述腿部连接板转动。
15.优选的,所述腿部连接板上还设置有腿部绑带。
16.优选的,所述上肢驱动模块包括两个伺服电机,两个所述伺服电机均通过伺服电机固定板安装于所述背板上,所述伺服电机的输出端通过线轮连接有鲍登线,所述鲍登线远离所述伺服电机的一端连接有所述搬运手套。
17.优选的,所述伺服电机上还设置有夹线块,所述夹线块能够将所述鲍登线夹紧;所述鲍登线靠近所述搬运手套的位置处设置有背带固定线块,所述背带固定线块能够与所述背带连接。
18.优选的,所述驱动模块还包括锂电池块,所述锂电池块安装于所述背板上,所述锂电池块的两侧设置有导线块。
19.优选的,所述控制模块包括核心开发板,所述核心开发板安装于所述背板上,所述核心开发板连接有惯性测量单元。
20.本发明相对于现有技术取得了以下技术效果:
21.本发明中采用有源腰部和上肢助力一体化的形式,能够大大实现助力效率,整体结构更加紧凑;本发明中采用鲍登线的传动方式,减少整体结构尺寸,减轻自重,同时由于柔性绳的方式,则外骨骼与人体运动协同性更好。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
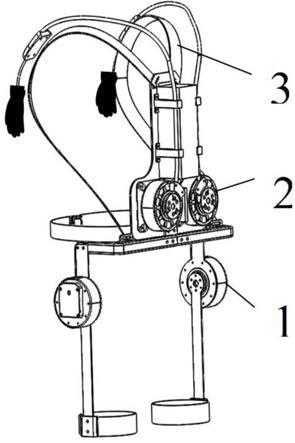
23.图1为本发明有源腰部和上肢一体化助力外骨骼的背面结构示意图;
24.图2为本发明驱动模块的结构示意图;
25.图3为本发明有源腰部和上肢一体化助力外骨骼的正面结构示意图;
26.其中,1为驱动模块,11为锂电池块,12为伺服电机,13为线轮,14为伺服电机固定板,15为鲍登线,16为夹线块,17为导线块,18为背带固定线块,2为控制模块,21为核心开发板,3为穿戴模块,31为腿部连接板,32为电机连接板,33为腿部连接块,34为背带连接块,35为背板,36为搬运手套,37为背带,38为腰带,39为卡扣,310为腿部绑带。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.本发明的目的是提供一种有源腰部和上肢一体化助力外骨骼,以解决上述现有技术存在的问题,能够有效的提高搬运过程中对人体的助力效率,大大减少腰部和人体上肢的损伤,进而实现腰部和上肢的有效助力。
29.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
30.实施例
31.本发明提供一种有源腰部和上肢一体化助力外骨骼,如图1-图3所示,包括:
32.穿戴模块3,所述穿戴模块3能够穿戴于人体上,所述穿戴模块3包括连接在一起的背部穿戴模块、腰部穿戴模块和腿部穿戴模块;
33.驱动模块1,所述驱动模块1包括腿部驱动模块和上肢驱动模块,所述腰部穿戴模块与所述腿部穿戴模块通过所述腿部驱动模块进行连接,所述腿部驱动模块能够驱动所述腿部穿戴模块转动;所述上肢驱动模块安装于所述背部穿戴模块上,所述上肢驱动模块连接有搬运手套36;
34.控制模块2,所述控制模块2与所述驱动模块1连接。
35.在本实施例中,驱动模块1是实现助力的主要动力输出部分,在控制模块2的驱动下驱动模块1实现相应动作,驱动模块1和控制模块2均通过穿戴模块3实现人体与外骨骼的物理绑缚,进而实现穿戴功能。
36.在本实施例中,腿部驱动模块主要包括伺服电机10,上肢驱动模块主要包括伺服电机12、鲍登线15、搬运手套36、背板35,夹线块16、线轮13,背带固定线块18等,驱动模块1还包括锂电池块11。
37.其中外骨骼机器人中共有腿部驱动模块和上肢驱动模块的两对伺服电机12是对人的上肢和腿部的输出动力来源,对上肢提供助力的一对伺服电机12结构对称,其中单侧伺服电机12的输出端通过线轮13与鲍登线15相连,该连接端同时通过夹线块16将鲍登线15进行夹紧固定,夹线块16则固定于伺服电机12上,鲍登线15通过锂电池块11两侧的导线块17将鲍登线15导出到外侧,导线块17也能实现对锂电池块11的固定,通过背带固定线块18与背带37相连实现鲍登线15输出端的固定,鲍登线15的输出端与搬运手套36连接;在人体搬运工作时通过手套实现手臂助力,伺服电机12的固定端通过伺服电机固定板14固定在背板35上面。
38.下肢的伺服电机12则通过电机连接板32固定,电机连接板32通过腿部连接块33固定在背板35上面,伺服电机12的输出端则通过腿部连接板31进行助力,腿部连接板31另一端通过穿戴部分中的腿部绑带310与腿部相连,在工作过程中实现对腿部的助力进而完成对腰部的助力。
39.在本实施例中,亦可以通过一对伺服电机12同时实现对上肢和腿部的助力,完成助力,伺服电机12的设置位置可以根据具体的工作需要进行调整。
40.在本实施例中,穿戴模块3主要包括腰带38、背带37、腿部绑带310;其中背带37上侧与背板35相连,下侧通过背带连接块34与腰带38相连,腰带38的后端中部与背板35相连,前端则是通过卡扣39实现腰带38的闭合,腿部绑带310固定在腿部连接板31上,将腿部连接板31完成与腿部的绑缚。
41.在本实施例中,控制模块2则是包括核心开发板21、惯性测量单元等共同组成,开
发板与背板35相连,惯性测量单元、i mu主要是完成对人体运动姿态的信息采集,并将采集的数据传输到核心开发板21上,并通过开发板完成对电机的控制。
42.本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。