1.本技术属于机器人技术领域,尤其涉及一种防误触按键电路、防误触按键装置以及机器人。
背景技术:
2.随着科技的发展,人工智能技术正广泛应用于各个领域,其中机器人正在代替人类在各个领域发挥重要的作用。由于马达需要安装在边框,会使得边框产生震感,触摸按键也需要安装在边框以达到触摸的效果,两者都不能移动,否则无法满足产品要求。
3.然而,马达在工作时产生的震感会导致触摸按键产生误触的问题。
技术实现要素:
4.为了解决上述技术问题,本技术实施例提供了一种防误触按键电路、防误触按键装置以及机器人,可以解决马达在工作时产生的震感会导致触摸按键产生误触的问题。
5.本技术第一方面提供了一种防误触按键电路,所述防误触按键电路包括:
6.按键检测模块,用于检测按键动作,并根据所述按键动作生成按键检测信号;
7.主控模块,与所述按键检测模块连接,用于接收所述按键检测信号,并根据所述按键检测信号生成第一电源控制信号和第二电源控制信号;
8.第一开关模块,分别与马达电源、马达以及所述主控模块连接,用于接收所述第一电源控制信号,并根据所述第一电源控制信号控制所述马达电源与所述马达之间连接;
9.第二开关模块,分别与控制板电源、按键控制板以及所述主控模块连接,用于接收所述第二电源控制信号,并根据所述第二电源控制信号控制所述控制板电源与所述按键控制板之间断开,其中,所述按键设于所述按键控制板上。
10.在一个实施例中,所述主控模块还用于在所述马达接入所述马达电源预设震动时间后,控制所述第一开关模块断开以使所述马达断电,并控制所述第二开关模块闭合以使所述按键控制板上电。
11.在一个实施例中,所述按键检测模块包括:第一电阻、第二电阻、第三电阻、第四电阻、第五电阻、第六电阻、第一电容、第二电容、第三电容以及电容检测芯片;
12.所述第一电阻的第一端与触摸按键连接,所述第一电阻的第二端与所述第一电容的第一端共接于所述电容检测芯片的检测引脚,所述第一电容的第二端接地,所述电容检测芯片的输出引脚、所述第五电阻的第一端以及所述第六电阻的第一端共接于所述主控模块,所述第五电阻的第二端、所述电容检测芯片的电源引脚、所述第二电阻的第一端、所述第二电容的第一端、所述第三电容的第一端共接于供电端,所述第六电阻的第二端接地,所述第二电容的第二端与所述第三电容的第二端接地,所述电容检测芯片的osel引脚、所述第二电阻的第二端以及所述第三电阻的第一端共接,所述第三电阻的第二端接地,所述电容检测芯片的接地引脚接地,所述电容检测芯片的外接电阻引脚与所述第四电阻的第一端连接,所述第四电阻的第二端接地。
13.在一个实施例中,所述第一开关模块包括:
14.开关控制单元,与所述主控模块连接,用于接收所述第一电源控制信号,并根据所述第一电源控制信号生成马达开关控制信号;
15.马达开关单元,分别与所述开关控制单元、所述马达电源以及所述马达连接,用于接收所述马达开关控制信号,并根据所述马达开关控制信号控制所述马达电源与所述马达之间连接。
16.在一个实施例中,所述开关控制单元包括:第四电容、第七电阻、第八电阻、第九电阻以及第一开关管;
17.所述第七电阻的第一端与所述主控模块连接,所述第七电阻的第二端、所述第四电容的第一端、所述第八电阻的第一端以及所述第一开关管的控制端共接,所述第四电容的第二端接地,所述第八电阻的第二端接地,所述第一开关管的第一端与所述第九电阻的第一端连接,所述第一开关管的第二端接地,所述第九电阻的第二端与所述马达开关单元连接。
18.在一个实施例中,所述马达开关单元包括:第五电容、第六电容、第十电阻、第十一电阻、第二开关管以及第一磁珠;
19.所述第一磁珠的第一端与所述马达电源连接,所述第一磁珠的第二端、所述第五电容的第一端、所述第十电阻的第一端以及所述第二开关管的第一端共接,所述第五电容的第二端、所述第十电阻的第二端以及所述第二开关管的控制端共接于所述开关控制单元,所述第二开关管的第二端、所述第六电容的第一端以及所述第十一电阻的第一端共接于所述马达,所述第六电容的第二端与所述第十一电阻的第二端共接于地。
20.在一个实施例中,所述第二开关模块为开关管、继电器中的任一项。
21.本技术第二方面还提供了一种防误触按键装置,所述防误触按键装置包括如上述任一项所述的防误触按键电路。
22.本技术第三方面还提供了一种机器人,所述机器人包括:触摸按键;马达;以及如上述任一项所述的防误触按键电路,其中,所述防误触按键电路分别与所述按键以及所述马达连接。
23.在一个实施例中,所述按键和所述马达均安装于边框上。
24.本技术实施例提供了一种防误触按键电路、防误触按键装置以及机器人,所述防误触按键电路包括:按键检测模块、主控模块、第一开关模块以及第二开关模块,由按键检测模块检测按键动作,并根据按键动作生成按键检测信号,主控模块基于该按键检测信号生成第一电源控制信号和第二电源控制信号,其中,第一电源控制信号用于控制马达电源与马达之间连接,第二电源控制信号用于控制控制板电源与按键控制板之间关断,通过在马达启动时关断控制板电源,避免马达在工作时产生的震感会导致触摸按键产生误触的问题。
附图说明
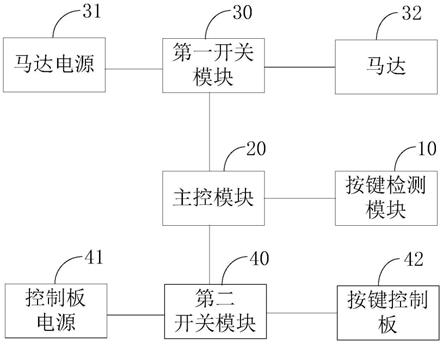
25.图1是本技术实施例提供的防误触按键电路的电路原理示意图;
26.图2是本技术实施例提供的按键检测模块的电路结构示意图;
27.图3是本技术实施例提供的又一防误触按键电路的电路原理示意图;
28.图4是本技术实施例提供的第一开关模块的电路结构示意图;
29.图5是本技术实施例提供的马达接入电路的电路结构示意图。
具体实施方式
30.为了使本技术所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
31.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
32.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
33.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
34.由于马达需要安装在边框,给与边框震感,触摸按键也需要安装在边框以达到触摸的效果,两者都不能移动,否则无法满足产品要求,因此,在实际使用过程中,马达和触摸按键结构相邻安装存在误触发问题。
35.为了解决上述技术问题,本技术实施例提供了一种防误触按键电路,参见图1所示,防误触按键电路包括:按键检测模块10、主控模块20、第一开关模块30以及第二开关模块40。
36.其中,按键检测模块10用于检测按键动作,并根据按键动作生成按键检测信号,主控模块20与按键检测模块10连接,用于接收按键检测信号,并根据按键检测信号生成第一电源控制信号和第二电源控制信号,第一开关模块30和第二开关模块40分别接收第一电源控制信号和第二电源控制信号,具体的,第一开关模块30分别与马达电源31、马达32以及主控模块20连接,第一开关模块30根据第一电源控制信号控制马达电源31与马达32之间连接,第二开关模块40分别与控制板电源41、按键控制板42以及主控模块20连接,第二开关模块40根据第二电源控制信号控制控制板电源41与按键控制板42之间断开,其中,触摸按键设于按键控制板42上。
37.在本实施例中,通过主控模块20基于该按键检测信号生成第一电源控制信号和第二电源控制信号,其中,第一电源控制信号用于控制马达电源31与马达32之间连接,第二电源控制信号用于控制控制板电源41与按键控制板42之间关断,从而在马达32启动时关断控制板电源41,避免马达32在工作时产生的震感会导致触摸按键产生误触的问题,解决了马达32和触摸按键结构安装相邻的误触发问题,实现触摸按键功能的同时也保证马达32的边缘震感效果,提升了机器人的稳定性,同时由于方案设计较为通用,极大的降低了成本。
38.在一个实施例中,按键可以为触摸按键,触摸按键可以包括多个按键,例如,静音
按键、软开关按键、急停按键等,多个按键可以共用一个按键检测模块10,或者每个按键均可以配置一个按键检测模块10,用于检测触摸按键的动作。
39.在一个实施例中,按键检测模块10用于检测按键动动作,并根据按键动作生成按键检测信号,例如,按键按下时,按键检测模块10根据该按下动作生成高电平的按键检测信号,并将该高电平的按键检测信号发送至主控模块20。
40.在一个实施例中,主控模块20还用于在马达32接入马达电源31预设震动时间后,控制第一开关模块30断开以使马达32断电,并控制第二开关模块40闭合以使按键控制板42上电。
41.在本实施例中,马达32和触摸按键的结构位置不变,马达电源31可以单独控制,当触摸按键按下后,主控模块20基于按键检测模块10生成的按键检测信号生成第一电源控制信号和第二电源控制信号,以断开按键控制板42的电源,并打开马达电源31,此时马达32的震感不变,由于按键控制板42断电,马达32对触摸按键的误触不会反馈至主控模块20。
42.主控模块20还可以在马达32接入马达电源31预设震动时间后,控制第一开关模块30断开以使马达32断电,同时控制第二开关模块40闭合以使按键控制板42上电,即触摸按键按下后,马达32根据触摸按键触发的信号执行完动作后断电,然后等待触摸按键触发的下一个信号。
43.例如,该预设震动时间可以为1s,即马达32震动1s后,关闭马达电源31,打开按键控制板42的电源,按键控制板42如之前一样正常工作,等待触摸按键触发的下一个信号。
44.在具体应用中,主控模块20可以为延时电路,该延时电路用于在马达32接入马达电源31后,延时预设震动时间,成第一电源控制信号和第二电源控制信号。
45.在一个实施例中,参见图2所示,按键检测模块10包括:第一电阻r1、第二电阻r2、第三电阻r3、第四电阻r4、第五电阻r5、第六电阻r6、第一电容c1、第二电容c2、第三电容c3以及电容检测芯片u1;第一电阻r1的第一端与触摸按键连接,第一电阻r1的第二端与第一电容c1的第一端共接于电容检测芯片u1的检测引脚key,第一电容c1的第二端接地,电容检测芯片u1的输出引脚st、第五电阻r5的第一端以及第六电阻r6的第一端共接于主控模块20,第五电阻r5的第二端、电容检测芯片u1的电源引脚vcc、第二电阻r2的第一端、第二电容c2的第一端、第三电容c3的第一端共接于供电端v1,第六电阻r6的第二端接地,第二电容c2的第二端与第三电容c3的第二端接地,电容检测芯片u1的osel引脚、第二电阻r2的第二端以及第三电阻r3的第一端共接,第三电阻r3的第二端接地,电容检测芯片u1的接地引脚gnd接地,电容检测芯片u1的外接电阻引脚radj与第四电阻r4的第一端连接,第四电阻r4的第二端接地。
46.在本实施例中,按键检测模块10可以由电容检测芯片u1及其外围电路组成,通过电容检测芯片u1检测触摸按键的按下动作,并生成对应的按键检测信号至主控模块20中。
47.在一个实施例中,电容检测芯片u1的型号可以为cpt2610。
48.cpt2610是一款低功耗双通道/单通道电容检测芯片u1,具有高效的rf噪音抑制功能,能够准确识别手指触摸引起的微小电容变化,适用于用触摸按键替代机械按键等应用场合;具有实时的自校准和基线跟踪算法,能有效避免因环境因素变化而引起按键误触等情况;支持输出有效电平选择,以满足不同系统平台及应用的要求。
49.在一个实施例中,参见图3所示,第一开关模块30包括:开关控制单元301和马达开
关单元302,开关控制单元301与主控模块20连接,开关控制单元301用于接收第一电源控制信号,并根据第一电源控制信号生成马达32开关控制信号;马达开关单元302分别与开关控制单元301、马达电源31以及马达32连接,用于接收马达32开关控制信号,并根据马达32开关控制信号控制马达电源31与马达32之间连接。
50.在本实施例中,开关控制单元301用于根据主控模块20输出的第一电源控制信号对马达开关单元302的通断进行控制,例如,若第一电源控制信号为高电平,则开关控制单元301控制马达开关单元302导通,马达32接入马达电源31,若第一电源控制信号为低电平,则开关控制信号控制马达开关单元302关断,马达32断电。
51.在一个实施例中,参见图4所示,开关控制单元301包括:第四电容c4、第七电阻r7、第八电阻r8、第九电阻r9以及第一开关管q1;第七电阻r7的第一端与主控模块20连接,第七电阻r7的第二端、第四电容c4的第一端、第八电阻r8的第一端以及第一开关管q1的控制端共接,第四电容c4的第二端接地,第八电阻r8的第二端接地,第一开关管q1的第一端与第九电阻r9的第一端连接,第一开关管q1的第二端接地,第九电阻r9的第二端与马达开关单元302连接。
52.在本实施例中,第一开关管q1通过第七电阻r7与主控模块20的第一电源控制信号端mute_a连接,若第一电源控制信号为高电平,则第一开关管q1导通,马达开关单元302的控制端被接地,其电平为低电平,若第一电源控制信号为低电平,则第一开关管q1关断,马达开关单元302的控制端的电平为高电平。
53.在本实施例中,第一开关管q1可以为npn型三极管。
54.在一个实施例中,参见图5所示,马达开关单元302包括:第五电容c5、第六电容c6、第十电阻r10、第十一电阻r11、第二开关管q2以及第一磁珠fb1;第一磁珠fb1的第一端与马达电源31连接,第一磁珠fb1的第二端、第五电容c5的第一端、第十电阻r10的第一端以及第二开关管q2的第一端共接,第五电容c5的第二端、第十电阻r10的第二端以及第二开关管q2的控制端共接于开关控制单元301,第二开关管q2的第二端、第六电容c6的第一端以及第十一电阻r11的第一端共接于马达32,第六电容c6的第二端与第十一电阻r11的第二端共接于地。
55.在本实施例中,第二开关管q2的第一端与马达电源31的输出端v2连接,第二开关管q2的第二端与马达32的供电端口vcc_moter连接,第五电容c5和第十电阻r10组成一个rc滤波电路,第六电容c6和第十一电阻r11组成一个滤波电路,开关控制单元301通过控制第二开关管q2的控制端的电平的高低控制马达32与马达电源31之间的连接状态。
56.在一个实施例中,第二开关管q2可以为p型mos管。
57.若第二开关管q2的控制端的电平为低电平,则第二开关管q2导通,若第二开关管q2的控制端的电平为高电平,则第二开关管q2关断。
58.在一个实施例中,第二开关模块40为开关管、继电器中的任一项。
59.在本实施例中,第二开关模块40设于按键控制板42与控制板电源41之间,用于根据第二电源控制信号进行通断,若第二开关模块40为开关管,则开关管的控制端与主控模块20连接,其第一端和第二端分别与按键控制板42和控制板电源41连接。
60.控制板电源41用于为按键控制板42供电,若按键控制板42与控制板电源41之间断开,则按键控制板42断电,触摸按键在按下时不会输出对应的触发信号。
61.在一个实施例中,图5为马达的接入电路的结构示意图,参见图5所示,该接入电路包括第二磁珠fb2和第一稳压管d1,第二磁珠fb2的第一端和第一稳压管d2的第一端共接于电源接头j1,第二磁珠fb2的第二端与马达的供电端vcc_moter连接,第一稳压管d1的第二端接地,主控模块20可以通过控制电源接头j1的通断控制马达与马达电源之间的连接状态。
62.通过接入第一磁珠fb1和第二磁珠fb2,可以用于抑制信号线、电源线上的高频噪声和尖峰干扰,同时磁珠还具有吸收静电脉冲的能力。
63.在一个实施例中,开关管可以为mos管或者三极管。
64.在一个实施例中,主控模块20可以为控制电路或者主控芯片,用于根据按键检测信号生成第一电源控制信号和第二电源控制信号,其中,第一电源控制信号和第二电源控制信号不同为高电平。例如,若按键检测信号为高电平,则第一电源控制信号为高电平,第二电源控制信号为低电平,若按键检测信号为低电平,则第一电源控制信号为低电平,第二电源控制信号为高电平。
65.本技术实施例还提供了一种防误触按键装置,所述防误触按键装置包括如上述任一项所述的防误触按键电路。
66.本技术实施例还提供了一种机器人,所述机器人包括:触摸按键;马达;以及如上述任一项所述的防误触按键电路,其中,所述防误触按键电路分别与所述按键以及所述马达连接。
67.在一个实施例中,所述按键和所述马达均安装于边框上。
68.本技术实施例提供了一种防误触按键电路、防误触按键装置以及机器人,所述防误触按键电路包括:按键检测模块、主控模块、第一开关模块以及第二开关模块,由按键检测模块检测按键动作,并根据按键动作生成按键检测信号,主控模块基于该按键检测信号生成第一电源控制信号和第二电源控制信号,其中,第一电源控制信号用于控制马达电源与马达之间连接,第二电源控制信号用于控制控制板电源与按键控制板之间关断,通过在马达启动时关断控制板电源,避免马达在工作时产生的震感会导致触摸按键产生误触的问题。
69.以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。