1.本发明涉及机器人定位划分技术领域,尤其涉及一种三维空间粒晶向位定位算法。
背景技术:
2.空间定位是一种非常普遍的算法,从传统的三维空间坐标定位,到现代的gps(全球定位系统)定位,都是根本的算法。机器人作为人类智慧的结晶,它的运动定位精度关系到机器人的精度。机器人在特定的工作状态下,需要一种适合机器人进行等量空间简单运算的规划算法。
3.现有的空间定位算法相对繁琐复杂,增加了机器人的计算难度和计算流程,由于机器人的作业目标不同,需要多次调节机器人的夹持精度,一定程度的降低了机器人的工作效率。
技术实现要素:
4.为解决背景技术中存在的技术问题,本发明提出一种三维空间粒晶向位定位算法,解决现有的空间定位算法相对繁琐复杂,增加了机器人的计算难度和计算流程,由于机器人的作业目标不同,需要多次调节机器人的夹持精度,一定程度的降低了机器人的工作效率的问题。
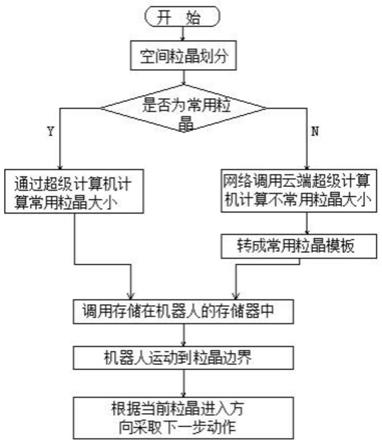
5.为此,本发明提供了一种三维空间粒晶向位定位算法,包括以下步骤:
6.s1、根据机器人的所需工作空间,对空间进行重新划分,划分的立方体为粒晶;
7.s2、利用设定的程序判断粒晶的大小精度是否为常用粒晶大小;
8.s3、若为粒晶大小为常用粒晶精度,则利用超级计算机计算常用粒晶的大小,并完成对机器人工作空间的划分;
9.s4、将划分后的粒晶大小及分布情况调用到机器人的存储器中进行存储;
10.s5、若粒晶大小为不常用粒晶精度,则通过网络调用云端机器人进行计算粒晶大小精度,随后将计算后的粒晶大小精度转化成常用粒晶模板,并完成对机器人工作空间的划分;
11.s6、将划分后的粒晶大小及分布情况调用到机器人的存储器中进行存储;
12.s7、利用机器人运行程序将机器人推送至粒晶的边界处;
13.s8、机器人的路径规划根据粒晶的进入方向采用下一步动作。
14.优选的,所述s1步骤中粒晶的大小精度根据机器人的作业目标大小设定。
15.优选的,s8步骤中,机器人路径运动规划包括机器人本体运动和机械臂初步运动规划,目标是接近作业目标,机器人只计算第一个,后续计算交给云端或其他电脑完成,机器人本身的算力主要用于作业目标的计算。
16.优选的,s8步骤完成后,机器人运动规划指机器人完成路径运动规划后,需要精准进入目标的路径和应对其他变化情况,使用机器人本身的算力完成计算并采取响应动作,
当机器人完成当前作业目标的操作后,调用云端或其他电脑的路径运动规划计算结果,继续实施路径运动,完成后继续作业运动,直到所用路径运动规划完成和作业运动完成。
17.优选的,s3步骤中超级计算机采用标准兼容处理器。
18.本发明提出的本发明提出一种三维空间粒晶向位定位算法,有益效果为:
19.1、通过采用粒晶向位的空间划分算法,在作业对象固定的情况下,降低机器人的算力要求,使得机器人制作成本减低,简化了规划算法和计算难度,提高了作业的实时性,同时机器人有更多算力用于计算从哪个方向进入此空间进行作业,使得机器人的作业效率增加;
20.2、机器人能够根据粒晶的大小调整夹持的方位和大小精度,更换作业目标时,无需多个调整精度,一定程度增加了机器人的工作效率。
附图说明
21.图1是本发明具体实施例的流程图;
22.图2是本发明空间粒晶划分整体图;
23.图3是本发明机器人的运行路径分析图。
具体实施方式
24.下面,通过具体实施例对本发明的技术方案进行详细说明。
25.参照图1-3,本发明提出了一种三维空间粒晶向位定位算法,包括以下步骤:
26.s1、根据机器人的所需工作空间,对空间进行重新划分,划分的立方体为粒晶;
27.s2、利用设定的程序判断粒晶的大小精度是否为常用粒晶大小;
28.s3、若为粒晶大小为常用粒晶精度,则利用超级计算机计算常用粒晶的大小,并完成对机器人工作空间的划分;
29.s4、将划分后的粒晶大小及分布情况调用到机器人的存储器中进行存储;
30.s5、若粒晶大小为不常用粒晶精度,则通过网络调用云端机器人进行计算粒晶大小精度,随后将计算后的粒晶大小精度转化成常用粒晶模板,并完成对机器人工作空间的划分;
31.s6、将划分后的粒晶大小及分布情况调用到机器人的存储器中进行存储;
32.s7、利用机器人运行程序将机器人推送至粒晶的边界处;
33.s8、机器人的路径规划根据粒晶的进入方向采用下一步动作。
34.优选的,所述s1步骤中粒晶的大小精度根据机器人的作业目标大小设定,机器人能够根据粒晶的大小调整夹持的方位和大小精度,更换作业目标时,无需多个调整精度,一定程度增加了机器人的工作效率。
35.优选的,s8步骤中,机器人路径运动规划包括机器人本体运动和机械臂初步运动规划,目标是接近作业目标,机器人只计算第一个,后续计算交给云端或其他电脑完成,机器人本身的算力主要用于作业目标的计算,在作业对象固定的情况下,降低机器人的算力要求,使得机器人制作成本减低,简化了规划算法和计算难度,提高了作业的实时性,同时机器人有更多算力用于计算从哪个方向进入此空间进行作业,使得机器人的作业效率增加。
36.优选的,s8步骤完成后,机器人运动规划指机器人完成路径运动规划后,需要精准进入目标的路径和应对其他变化情况,使用机器人本身的算力完成计算并采取响应动作,当机器人完成当前作业目标的操作后,调用云端或其他电脑的路径运动规划计算结果,继续实施路径运动,完成后继续作业运动,直到所用路径运动规划完成和作业运动完成,更加精准。
37.优选的,s3步骤中超级计算机采用标准兼容处理器,一机多用,使的超级计算机的计算范围比较灵活、广泛。
38.本发明的特点在于,采用以不同大小的正方体,对所需工作的空间重新划分,采用多步逐级从不同方向运动的方法,立方体大小根据不同工作内容而不同,这样就可以大大简化空间的划分,非常适合机器人进行路径和作业轨迹的空间规划定位,而且还可以预存多种不同粒晶大小的预案,使用前调出预案节约算力,实际使用时只需要判断选择当前第一个针对的粒晶采取作业动作,下一个粒晶和后续粒晶的计算交给其他cpu完成后返回结果,作业动作分多步执行,第一步先运动到粒晶边界,再根据当前粒晶进入方向继续划分粒晶后采取后续动作,降低机器人的算力要求,使得机器人制作成本减低,简化了规划算法和计算难度,提高了作业的实时性,同时机器人有更多算力用于计算从哪个方向进入此空间进行作业,使得机器人的作业效率增加,机器人能够根据粒晶的大小调整夹持的方位和大小精度,更换作业目标时,无需多个调整精度,一定程度增加了机器人的工作效率。
39.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
技术特征:
1.一种三维空间粒晶向位定位算法,其特征在于,包括以下步骤:s1、根据机器人的所需工作空间,对空间进行重新划分,划分的立方体为粒晶;s2、利用设定的程序判断粒晶的大小精度是否为常用粒晶大小;s3、若为粒晶大小为常用粒晶精度,则利用超级计算机计算常用粒晶的大小,并完成对机器人工作空间的划分;s4、将划分后的粒晶大小及分布情况调用到机器人的存储器中进行存储;s5、若粒晶大小为不常用粒晶精度,则通过网络调用云端机器人进行计算粒晶大小精度,随后将计算后的粒晶大小精度转化成常用粒晶模板,并完成对机器人工作空间的划分;s6、将划分后的粒晶大小及分布情况调用到机器人的存储器中进行存储;s7、利用机器人运行程序将机器人推送至粒晶的边界处;s8、机器人的路径规划根据粒晶的进入方向采用下一步动作。2.如权利要求1所述的一种三维空间粒晶向位定位算法,其特征在于,所述s1步骤中粒晶的大小精度根据机器人的作业目标大小设定。3.如权利要求1所述的一种三维空间粒晶向位定位算法,其特征在于,s8步骤中,机器人路径运动规划包括机器人本体运动和机械臂初步运动规划,目标是接近作业目标,机器人只计算第一个,后续计算交给云端或其他电脑完成,机器人本身的算力主要用于作业目标的计算。4.如权利要求1所述的一种三维空间粒晶向位定位算法,其特征在于,s8步骤完成后,机器人运动规划指机器人完成路径运动规划后,需要精准进入目标的路径和应对其他变化情况,使用机器人本身的算力完成计算并采取响应动作,当机器人完成当前作业目标的操作后,调用云端或其他电脑的路径运动规划计算结果,继续实施路径运动,完成后继续作业运动,直到所用路径运动规划完成和作业运动完成。5.如权利要求1所述的一种三维空间粒晶向位定位算法,其特征在于,s3步骤中超级计算机采用标准兼容处理器。
技术总结
本发明公开了一种三维空间粒晶向位定位算法,其特征在于,包括以下步骤:S1、根据机器人的所需工作空间,对空间进行重新划分,划分的立方体为粒晶;S2、利用设定的程序判断粒晶的大小精度是否为常用粒晶大小;S3、若为粒晶大小为常用粒晶精度,则利用超级计算机计算常用粒晶的大小,并完成对机器人工作空间的划分;S4、将划分后的粒晶大小及分布情况调用到机器人的存储器中进行存储;通过采用粒晶向位的空间划分算法,在作业对象固定的情况下,降低机器人的算力要求,使得机器人制作成本减低,简化了规划算法和计算难度,提高了作业的实时性,同时机器人有更多算力用于计算从哪个方向进入此空间进行作业,使得机器人的作业效率增加。率增加。率增加。
技术研发人员:谭建忠 姜建胜 朱文龙
受保护的技术使用者:智动时代(北京)科技有限公司
技术研发日:2021.10.08
技术公布日:2022/2/10