水下遥控潜水器的工具互换件、对应系统及方法
优先权声明
1.本技术要求于2019年4月5日提交的美国专利申请第16/376,622号的优先权,该专利申请的全部内容以参见的方式纳入本文。
背景技术:
2.在石油化工勘探和生产中,许多海上油井的深度远远超出了潜水员能达到的深度。在这些情况下,从水面以上控制水下遥控潜水器(rov),执行建造和控制油井的一些操作。rov具有操纵臂,其可以安装用于执行这些操作的工具。一些操纵臂具有远程释放和附接工具的能力,使得当rov在海底时可以互换不同的工具。
附图说明
3.图1是在海底作业的水下遥控潜水器(rov)的立体图;
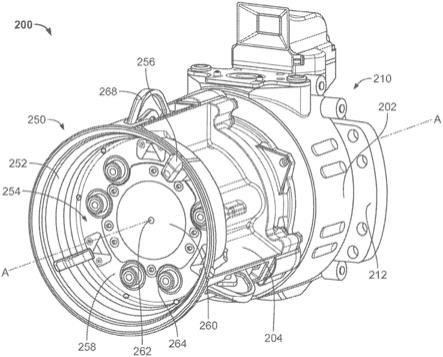
4.图2a是根据本文概念构建的示例性工具互换件的前视、俯视立体图,而图2b是该示例性工具互换件的后视、俯视立体图;
5.图3是用于图2a和2b的示例性工具互换件的示例性阳型安装件的前视、俯视立体图;
6.图4是省略了一些方面的示例性工具互换件的侧视横截面图;
7.图5是关注示例工具互换件的液压连接器部件的详细侧视横截面图;以及
8.图6是该示例性工具互换件的歧管体的详细、部分侧视横截面图。
9.在整个图中,类似的附图标记用于表示相似部件。
具体实施方式
10.图1示出了示例性的水下(例如,海底型)遥控潜水器(rov)10。rov 10可以被操作人员从远程位置12控制,以在水中游动并执行某些操作,该远程位置12通常是在水体的表面14之上。图1的rov 10包括操纵臂16,其端部附接有工具18。在某些情况下,rov可以包括一个或多个附加臂,诸如抓取器或其他类型的臂,但操纵臂16是最灵巧的,具有多个枢轴和旋转关节,使臂能够以多个自由度运动。
11.rov 10通过操纵臂16向工具18供应动力,例如电力和/或液压动力,使操作员能够致动和操作工具18。同样,工具18和rov 10经由操纵臂16进行数据通信,该数据包括来自工具18中的传感器的输出,对工具18中的执行器的控制信号,以及其他数据。
12.图1示出工具18是具有两个部件的钳部,可以被操作打开和关闭以抓取和保持物体。但是,有许多不同的工具可以用于rov,包括扭力工具、切割器和其他工具。本文概念包括工具互换件20,其安装在操纵臂16的端部处,位于操纵臂16和工具18之间,成为操纵臂16和工具18之间的接口。工具互换件20使rov 10能够在没有外部辅助的情况下在水下更换工具18。例如,操作员可以操作操纵臂16,以将工具18对接到工具储存单元中。该工具储存单元可以在rov上和/或离开rov。然后操作者可以致动工具互换件20以从操纵臂16释放工具,
收回操纵臂16,并将工具18留在工具储存单元中。然后,操作者可以操作操纵臂16以对接不同的工具18,并致动工具互换件18以抓持和锁定进入新的工具18。此后,操作者可以使用不同的工具18进行作业。
13.图2a和2b是根据本文概念构建的可用作工具互换件20的示例工具互换件200的前视后视、俯视立体图。工具互换件200包括第一互换件主体202,其承载第二互换件主体204,使得第二互换件主体204可以相对于第一互换件主体202在旋转轴线a-a上旋转。此处,旋转轴线a-a纵向延伸通过互换工具200的中心(这里的工具200大致是圆柱形的,轴线a-a通过圆柱体的中心)。但是,在其他情况下,轴线a-a可以偏离工具200的中心。工具互换件200可操作,经由电机(后文将详细讨论)来驱动第二互换件主体204在第一互换件主体202上旋转。第一互换件主体202适合于物理附着到rov的操纵臂,并经由操纵臂与rov的系统进行液压、电气和/或光学连通。第二互换件主体204适于接收和抓持rov工具,并与rov工具,诸如工具18进行液压、电气和/或光学连通。
14.在图2b中,第一互换件主体202的一端处示出有rov操纵臂安装件210。rov操纵臂安装件210具有两个向外延伸凸缘212。凸缘可以用螺栓和/或其他方式附着在操纵臂上的对应凸缘上,将互换件主体202机械地附着到操纵臂。rov操纵臂安装件210限定了第一互换件主体202的背面214的一部分,并包括多个与操纵臂上的端口对应的液压端口216。端口216与操纵臂的对应端口密封(例如,用o型环、垫圈和/或其他方式),以允许经由操纵臂的液压通道和软管在工具互换件200和rov之间进行液压流体连通。背面214附加地可以包括用于电力和光纤的通路218,允许rov和工具互换件200之间经由操纵臂的导电体和光纤进行电力连通、电气通信和光学连通。可以设置更少或附加的通路和/或端口。值得注意的是,每个通路不需要专门用于一根导线或一根光纤,而是可以容纳捆绑的线缆,线缆内有多个电导体/光纤。
15.在图2a中,第二互换件主体204在其与操纵臂安装件210相对的端部示出为具有工具安装件250。工具安装件250可在使第二互换件主体204抓持rov工具和释放rov工具之间进行操作,将rov工具抓持到第二互换件主体204使得操纵臂可以操作该工具,从第二互换件主体204释放rov工具使得该工具可以替换成不同的工具。工具安装件250包括外周边壁252,该外周边壁252在内部限定了壁252内的工具接收容座254。
16.还请参考图3,rov工具的一端设有阳型安装件300,该阳型安装件300设计为在工具接收容座254内对接并紧密地接收。在某些情况下,周边壁252略呈圆锥形或朝向旋转轴线a-a汇聚,以引导阳型安装件300进入容器254并使其对于旋转轴线a-a居中。旋转对齐键256从周边壁252径向向内突起,超出工具接收容座254的后壁258。阳型安装件300包括对应键槽302,当阳型安装件300对接到容器254中时,键槽302接收旋转对齐键256。键256和键槽302匹配,使阳型安装件300与工具安装件250旋转对齐。在特定情况下,旋转对齐键256在周边壁252的顶部附近可以更窄,而在后壁258附近更宽,并且键槽302具有对应的形状,以便随着旋转对齐键256接收到键槽302的更深处,而越来越多地、更精细地旋转对齐阳型安装件300与工具安装件250。
17.工具安装件250包括一个或多个闩锁268(以120
°
的间距示出为三个),枢转安装在周边壁252上,并可在闩锁位置和非闩锁位置之间操作。图2a和图4示出闩锁268是钩形的,但闩锁268可以是其他构造。图中还示出闩锁268在其非闩锁位置,向外定位离开工具接收
容座254的内部。响应于由rov向互换工具200传递的信号,闩锁268被致动以朝向旋转轴线a-a方向向内枢转至闩锁位置。
18.简要参考图4,闩锁268与活塞/缸体272(每个闩锁268一个)联接,该活塞/缸体272响应于供应的液压流体,在闩锁和非闩锁位置之间致动闩锁268。活塞/缸体272可以经由一个或多个液压端口216与rov进行液压连通,使rov能够向活塞/缸体272供应液压流体以致动闩锁268。
19.如图3所示,阳型安装件300包括围绕其外周边的抓持凹穴304。抓持凹穴304在数量上与闩锁268相对应。当阳型安装件300对接在工具接收容座254内时,闩锁268周围阳型安装件300的外周边驻留。此外,当阳型安装件300对接在工具接收容座254内,并通过键256和键槽302旋转对齐时,抓持凹穴304的位置与闩锁268相对应。当闩锁268向内枢转到闩锁位置时,闩锁268进入对应的抓持凹穴304,并将阳型安装件300夹持在对接位置中,完全接受在工具接收容座254内。在该位置,阳型安装件300的端壁306与工具接收容座254的后壁258邻接。当闩锁268向外枢转到非闩锁位置时,闩锁268从对应的抓持凹穴304内释放,并允许阳型安装件300从工具接收容座254抽出。值得注意的是,在特定情况下,围绕工具互换件200周边定位的闩锁268和对应的抓持凹穴304,能够使工具互换件200和阳型安装件300的轴向组装比闩锁和内侧凹穴更紧凑。这是因为外侧闩锁268和抓持凹穴304允许接口的另外方位在与闩锁268和抓持凹穴304相同的轴向位置上嵌套在内侧。
20.具体参照图2a,工具安装件250的后壁258包括感应式电力联接部件260和光纤联接部件262。感应式电力联接部件260和光纤联接部件262都在工具安装件250中向外呈现,方向与第一互换件主体202相对,因此,当阳型安装件300对接在工具接收容座254中时,感应式电力联接部件260和光纤联接部件262面向阳型安装件300。感应式电力联接部件260有大致平坦的表面,在图2a中,其形状示出为圆形(但可以是其他形状)。感应式电力联接部件260和光纤联接部件262都对于旋转轴线a-a居中,并且相对于第一互换件主体202固定,因此当第二互换件主体204旋转时,感应式电力联接部件260和光纤联接部件262保持静止。
21.还参考图3,阳型安装件300的端壁306包括对应的感应式电力联接部件308和对应的光纤联接部件310。对应的感应式电力联接部件308定位成当阳型安装件300对接在工具安装件250的工具接收容座254中时,对应的感应式电力联接部件308与工具安装件250的感应式电力联接部件260相邻,但间隔开(例如,不接触)。同样地,对应的光纤联接部件310定位成当阳型安装件300对接在工具接收容座254中时,对应的光纤联接部件310与工具安装件250的光纤联接部件262相邻但间隔开(例如,不接触)。因此,当第二互换件主体204在旋转轴线a-a上旋转时,联接部件260、308、262、310不会彼此接触和磨损。
22.感应式电力联接部件260构造为在接触或甚至跨过中间间隙时在对应的感应式电力联接部件308中感应出电力,以向附接到阳型安装件300的工具供应电力。这样的感应式电力联接不依靠接触来有效地传输电力,因此不太容易受到可能漂浮在联接部件260、308之间的碎片的影响。另外,与典型的接触型滑移联接件相比,这种非接触的感应和光纤联接件的复杂性可以更低,有更少的零件会发生故障,在互换工具200内占用的空间也更少。由此产生的工具互换件可以更加紧凑,从而提高rov使用工具的灵巧性。感应式电力联接部件260有很大的面积,在图2a中示出为直径约为后壁258的直径的一半,以促进高功率传递。在特定情况下,感应式电力联接是一种谐振感应式联接,其一个部件或两个部件都包括谐振
电路。感应式电力联接部件260和对应的感应式电力联接部件308的尺寸可以根据需要设置,以有效地传递操作工具所需的功率量。此外,在某些情况下,与其他类型的连接器或联接件相比,感应式电力联接器可以向rov工具提供更多的功率传输,使rov工具中可以利用用电更高的设备,诸如电动液压阀(螺线管、比例、伺服)、灯和电动机,而不是简单的低功率传感器。
23.光纤联接部件262构造为与对应的光纤联接部件310跨过中间间隙进行数据(例如,信号)通信,以允许rov与附接到阳型安装件300的工具连通。例如,光纤联接件允许rov访问工具中的传感器,以及实现工具和rov之间的其他数据交换。
24.再次参照图2a,工具安装件250的后壁258包括一个或多个液压连接器部件264(示出为五个)。液压连接器部件264在工具座250中向外呈现,其方向与第一互换件主体202相对,因此当阳型安装件300对接在工具接收容座254中时,液压连接器部件264面向阳型安装件300。液压连接器部件264在径向上定位于感应电力联接部件260的外侧。还是参考图3,阳型安装件300的端壁306包括对应的液压连接器部件312,其数量可与液压连接器部件264对应。当阳型安装件300对接在工具接收容座254中时,对应的液压连接器部件312也与液压连接器部件264位置对应。阳型安装件300移动到完全对接的位置时,液压连接器部件264受弹簧偏置从后壁258向外突出,以受对应的液压连接器部件312驱动向内压缩。此后,由于键256在阳型安装件300的键槽302中配对,并且由于闩锁268的夹紧力,当第二互换件主体204相对于第一互换件主体202旋转时,阳型安装件(以及因此工具)与第二互换件主体一起旋转。因此,配对的液压连接器部件264、312一致地移动并维持连接。
25.在图5中可以更好地看到液压连接器部件264的细节。液压连接器部件264包括可伸缩地接收在第二互换件主体204的孔504中的外壳体502。弹簧506驻留于肩部516和壳体502的下端之间,将壳体从工具接收容座254的后壁258向外偏置。当对应的液压连接器部件312对着壳体502移动时,其压缩弹簧506并将壳体推入孔504。弹簧506在液压连接器部件264和对应的液压连接器部件312之间维持压力,促进部件之间形成牢固的液压密封。壳体502的出口端包括孔隙508,该孔隙被提升阀510封堵,利用其端部上的提升阀密封件。第二弹簧512驻留于壳体502内部的肩部514和提升阀510之间,将提升阀偏置510以与孔隙508的内部密封接合。当对应的液压连接器部件312与液压连接器部件264接触时,其将提升阀510推离孔隙508,允许通过孔隙508和液压连接器部件312、264之间的流动。
26.参考图4,提供感应式联接部件260和光纤联接部件262的电导体266(例如导线)和光纤线路270驻留在固定到第一互换件主体202的中央壳体274中。中央壳体274以穿过第二互换件主体204的轴线a-a为中心。中央壳体274承载着感应式联接部件260和光纤联接部件262,将这些联接件在工具接收容座254的后壁258处支承就位。第二互换件主体204限定了接收中央壳体274的内腔体276,第二互换件主体204由第一互换件主体202承载,以围绕中央壳体274旋转。尽管为了示出互换件的另外特征而从图4中省略了,但电机(例如电动、液压和/或其他的)可以定位在第一互换件主体202和第二互换件主体204之间,以实现第二互换件主体204相对于第一互换件主体202的旋转。用于电导体和光纤线路的通路218通过第一互换件主体202中的通道278连接到中央壳体274的一端,使得电导体266和光纤线路270可以连接到电感联接部件260和光纤联接部件262。
27.液压端口216通过第一互换件主体202中的液压通道280连接到附着到第一互换件
主体202的环形歧管体282。环形歧管体282大致是圆柱形的,具有圆柱形的外表面和内表面。环形歧管体282接收在第二互换件主体204中限定的环形空隙中,在接收中央壳体274的腔体276的外侧。在图4中,第二互换件主体204构造成多个部件,包括内壳体286,该内壳体附着到第二互换件主体204的外部分288,并限定了接收中央壳体274的腔体276。在其他情况下,第二互换件主体204可以具有更少或更多的部件。
28.内壳体286在其外表面上承载有若干密封件290,这些密封件与环形歧管体282的内表面邻接并密封,环形歧管体282限定了若干密封的环形通道292,这些环形通道292彼此流体隔离。在图4中,围绕环形歧管体282的内部存在三个密封环形通道292,但在其他情况下,可以有更少或更多的通道。第二互换件主体204的外部分288在其内表面上也承载有若干密封件290,该密封件290与环形歧管体282的外表面邻接并密封。这些密封件290还限定了若干彼此隔离的密封环形通道292。在图4中,围绕环形歧管体282的外部存在四个密封环形通道292,但在其他情况下,可以有更少或更多的通道。
29.参照图6,环形歧管体282与第一互换件主体202邻接的端部包括液压端壁端口294,其数量和位置与第一互换件主体202中的液压通道280相对应,因此当环形歧管体282附着到第一互换件主体202时,该端口相对液压通道280密封起来并进行流体连通。液压端口294与环形歧管体282内的内通道296连通流体,而内通道296又与进入环形通道292的若干侧壁端口298中选择的连通流体。如图4所示,第二互换件主体204包括液压通道206网络,该网络与环形通道292进行流体连通。液压通道206与工具互换件200的各个方面连通液压流体,包括液压连接器部件264、活塞/缸体272、和/或工具互换件200的其他方面。因此,环形歧管体282的内部通道296实现了第一互换件主体202中的端口216与工具互换件200的各方面之间的特定流体连接,使得rov可以以这些方面连通流体以控制工具互换件200并与对接的rov工具连通流体。
30.作为示例,图5中可见的两个通道206可以被指定为闩锁控制通道,因为其连接到活塞/缸体272的相对(两)侧。每个(通道206)连接到隔离环形通道292中不同的一个,使rov能够向第一互换件主体202中的对应端口216施加液压压力,以独立地和有选择地对这些通道加压。通过向对应端口216施加压力,rov可以在闩锁和非闩锁位置之间致动闩锁268。
31.由于环形歧管体282固定到第一互换件主体202,当第二互换件主体204在旋转轴线a-a上旋转时,第二互换件主体204围绕环形歧管体282旋转。由于其环形布置,密封件290维持与环形歧管体282的密封接触,并维持环形通道292彼此隔离。以及,由于通道292是环形的,其连续在环形歧管体282中的侧壁端口298和第二互换件主体204的通道206之间提供连通。因此,当第二互换件主体204旋转时,无论其角度定向如何,第一互换件主体202中的端口216和工具互换件主体200的各方面之间的流体连接都能保持。换句话说,当第二互换件主体204旋转,无论其角度定向如何,rov可以与这些方面连通流体,以控制工具互换件200并与对接的rov工具连通流体。该布置消除了对主体202、204之间的连接软管的需要,该软管会扭曲起来并限制第二互换件主体204的旋转。
32.在操作中,参照图2a、2b和3,当工具互换件200联接到rov操纵臂时,rov工具的阳型安装件300接收到工具互换件200的工具安装件250中。如果阳型安装件300与工具安装件250的角度未对齐,可以旋转第二互换件主体204,直到工具安装件250的键256落入阳型安装件300的键槽302,使阳型安装件302下降到工具接收容座254内的完全对接的位置或接近
完全对接位置。然后,rov操作者致动rov以在对应于活塞/缸体272的液压通道上供应液压压力,以从非闩锁位置进入闩锁位置致动闩锁268,该闩锁268将阳型安装件拉到完全对接位置。在闩锁位置中,闩锁268将rov工具抓持到工具安装件250。此后,工具互换件200可以经由感应式联接件260、308与rov工具进行感应式电力连通,经由光纤联接件262、310与rov工具进行数据(例如,信号)通信,并经由液压连接器264、312与rov工具进行液压连通。在第二互换件部分204相对于第一互换件部分202旋转时,例如在工具的操纵和操作期间,并且无论第二互换件部分204相对于第一互换件部分的角度定向如何,这些各种形式的通信(连通)都可以发生。
33.虽然已经描述了一些实施方案,但是应该理解,这里的概念并不限于这些实施方案。相反,在不偏离本公开内容的情况下,另外的变化、置换和改变也是可能的。
34.方面l。一种用于水下遥控潜水器(rov)臂的工具互换件,该工具互换件包括:第一互换件主体,其附着到rov臂;第二互换件主体,其由第一互换件主体承载以在旋转轴线上旋转,第二互换件主体包括可在将rov工具抓持到第二互换件主体和将rov工具从第二互换件主体释放之间操作的工具安装件;以及工具安装件中的感应式电力联接部件,该感应式电力联接部件在工具安装件中向外呈现,驻留在旋转轴线上并相对于第一互换件主体固定,该感应式电力联接部件适于在rov工具对接在工具安装件中时与rov工具的对应感应电力联接部件感应地连通电力。
35.方面2。如方面1的工具互换件,包括在工具安装件中的光纤联接部件,其驻留在旋转轴线上,并相对于第一互换件主体固定,该光纤联接部件适于在rov工具对接在工具安装件中时与rov工具的对应光纤联接部件连通。
36.方面3。如方面1或2的工具互换件,其中光纤联接部件适于在部件间隔开时与rov工具的对应光纤联接部件连通。
37.方面4。如方面1-3中任一项的工具互换件,包括固定到第一互换件主体并沿旋转轴线延伸的中央壳体,中央壳体包括感应式电力联接部件和光纤联接部件;以及其中第二互换件主体被承载以围绕中央壳体旋转。
38.方面5。如方面1-4中任一项的工具互换件,其中感应式电力联接部件包括谐振感应式电力联接部件,该部件适于在部件间隔开时与rov工具的对应感应式电力联接部件感应地连通电力。
39.方面6。如方面1-5中任一项的工具互换件,其中该工具安装件包括:周边壁,周边壁内限定有工具接收容座;以及周边上的闩锁,该闩锁可在闩锁位置和非闩锁位置之间操作,在闩锁位置中朝向旋转轴线向内枢转以将rov工具抓持入工具接收容座,在非闩锁位置向外枢转以从第二互换件主体释放rov工具。
40.方面7。如方面6的工具互换件,包括邻近周边壁并延伸到工具接收容座中的工具旋转对齐键。
41.方面8。如方面6的工具互换件,包括在第二互换件主体上工具接收容座内,并在感应式电力联接部件的径向外侧的多个液压连接器部件,该液压连接器部件适于与rov工具的对应液压连接器部件连通液压压力,并被承载以与第二互换件主体一起旋转。
42.方面9。如方面8的工具互换件,其中液压连接器部件各受弹簧偏置以向工具接收容座的表面外突起,以在与rov工具上的对应液压连接器部件的配对接合中压缩。
43.方面10。如方面8的工具互换件,包括相对于第一互换件主体固定并延伸进入第二互换件主体的环形歧管,该环形歧管包括:具有圆柱形外表面的歧管体;歧管体中的第一液压通道,该第一液压通道与第一互换件主体的第一对应液压通道流体连通,并包括圆柱形外表面上的第一侧壁端口;歧管体中的第二液压通道,该第二液压通道与第一互换件主体的第二对应液压通道流体连通,并包括圆柱形外表面上的第二侧壁端口;歧管体上第一液压通道和第二液压通道之间的密封件,该密封件在圆柱形外表面和第二互换件主体之间密封。
44.方面11。如方面10的工具互换件,包括第二互换件主体中的闩锁控制液压通道,该液压通道与第一液压通道流体连通并与第二液压通道隔离,并且其中第二液压通道与适于与rov工具的对应液压连接器部件连通液压压力的液压连接器部件流体连通。
45.方面12。一种方法,包括:在联接到rov臂的工具互换件的工具安装件处接收rov工具,该工具互换件包括第一部分,该第一部分承载第二部分以在旋转轴线上旋转;响应于信号将rov工具抓持到工具互换件的第二部分;以及通过驻留在旋转轴线上并相对于第一部分固定的感应式联接件在rov和rov工具之间感应地连通电力。
46.方面13。如方面12的方法,包括通过驻留在旋转轴线上的光纤联接器在rov和rov工具之间连通信号。
47.方面14。如方面13的方法,其中连通信号包括跨过工具互换件的第一光纤联接部件和rov工具的第二光纤联接部件之间的间隙连通信号。
48.方面15。如方面12-14中任何一项的方法,其中感应地连通电力包括跨过工具互换件的第一感应式联接部件和rov工具的第二感应式联接部件之间的间隙感应地连通电力。
49.方面16。如方面12-15中任一项的方法,其中将rov工具抓持包括使围绕工具互换件的外周边驻留的闩锁从非闩锁位置向内移动到闩锁位置以抓持rov工具。
50.方面17。如方面12-16中任一项的方法,包括在第二部分相对于第一部分旋转时,在rov和rov工具之间进行液压连通。
51.方面18。一种用于将rov工具联接到rov的系统,包括:适于联接到rov的第一部分;联接到第一部分并适于联接到rov工具的第二部分,第二部分可相对于第一部分在旋转轴线上旋转;以及相对于第一部分固定并驻留在旋转轴线上的感应器,该感应器适于在第二部分在第一部分上旋转时向rov工具感应地连通电力。
52.方面19。如方面18的系统,包括相对于第一部分固定并驻留在旋转轴线上的光纤联接部件,该光纤联接部件适于跨过间隙与rov工具连通信号。
53.方面20。如方面18或19的系统,包括环形歧管,该环形歧管在第二部分旋转时,无论第二部分相对于第一部分的角度定向如何,都使第一部分中的液压通道与第二部分中的液压通道流体连通。