1.本实用新型涉及把手领域,更具体地,涉及一种滑动推杆把手。
背景技术:
2.推杆把手属于机械零部件,多用于机床,车辆等机械设备。具有表面坚硬光滑,不易磨损,耐热,绝缘等优点,一般使用胶木制造作为把手握力部分。
3.传统推杆结构简单,在机械设备上使用时手动操作把手即可进行操作,这使得在设备快速更新迭代的情况下,推杆把手没有改进,依旧外观粗笨,响应不及时,操作不可控等缺点。
技术实现要素:
4.本实用新型为克服上述现有技术所述的操作不可控的缺陷,提供一种滑动推杆把手。
5.为解决上述技术问题,本实用新型的技术方案如下:
6.一种滑动推杆把手,包括开关、导线、把手、滑轨和固定底座,所述把手包括手指承托部、手掌承托部和手腕承托部,所述手指承托部连接手掌承托部,所述手掌承托部连接手腕承托部一侧,所述手腕承托部另一侧设有凹槽结构,所述固定底座上表面设有滑槽,滑槽底部设有滑轨,滑轨上套接有凸起的滑块,滑块顶部与手腕承托部的凹槽结构配合连接,所述凹槽结构表面和滑块表面设有相对应的金属接触片,所述手指承托部一侧设置有按压开关,所述按压开关通过导线连接凹槽结构的金属接触片,所述滑块内设有电子锁,电子锁通过导线连接滑块的金属接触片,电子锁锁舌与滑轨相抵。
7.所述把手符合人手部结构,抓握更方便得力。所述凹槽结构表面和滑块表面的相对应金属接触片连接时,接通把手和固定底座之间的线路,正常情况下把手和固定底座为锁定状态,把手不能推动;当按下按压开关,线路连通,把手可前后推动。
8.优选地,把手为绝缘橡胶材质结构。绝缘橡胶不仅具有良好的橡胶物理机械性能外,还具有良好的电绝缘性能,安全系数更高。
9.优选地,手掌承托部包括第一手掌承托部和第二手掌承托部,所述第一手掌承托部其一端与手腕承托部相连,另一端与手指承托部相连,所述第二手掌承托部其一端与手腕承托部相连,另一端与手指承托部相连。
10.优选地,第一手掌承托部带有下凹弧度结构。
11.优选地,下凹弧度结构适配人手大拇指根部。
12.优选地,第一手掌承托部带有拱起弧度结构。
13.优选地,拱起弧度结构适配人手掌心部分。手掌承托部的弧度变化提高了手部放置时的舒适性。
14.优选地,手指承托部包括四指承托部和拇指承托部,所述四指承托部的一侧连接拇指承托部。
15.优选地,四指承托部符合人体手型的凹凸结构。凹凸结构贴合手指握起时的状态,既提高握力,又增加了舒适度。
16.优选地,拇指承托部向上翘起,按压开关设置于拇指承托部的端部。
17.与现有技术相比,本实用新型技术方案的有益效果是:
18.一种滑动推杆把手,包括开关、导线、把手、滑轨和固定底座,所述把手包括手指承托部、手掌承托部和手腕承托部,所述手指承托部连接手掌承托部,所述手掌承托部连接手腕承托部一侧,所述手腕承托部另一侧设有凹槽结构,所述固定底座上表面设有滑槽,滑槽底部设有滑轨,滑轨与滑轨上套接有凸起的滑块,滑块顶部与手腕承托部的凹槽结构配合连接,所述凹槽结构表面和滑块表面设有相对应的金属接触片,所述手指承托部一侧设置有按压开关,所述按压开关通过导线连接凹槽结构的金属接触片,所述滑块内设有电子锁,电子锁通过导线连接滑块的金属接触片电子锁锁舌与滑轨相抵。本实用新型为克服现有技术所述的操作不可控的缺陷,提供一种滑动推杆把手,材质绝缘更安全,人体工学手持部抓握更加方便,线路操作更可控。
附图说明
19.图1为一种滑动推杆把手的把手仰视图。
20.图2为一种滑动推杆把手的固定底座示意图。
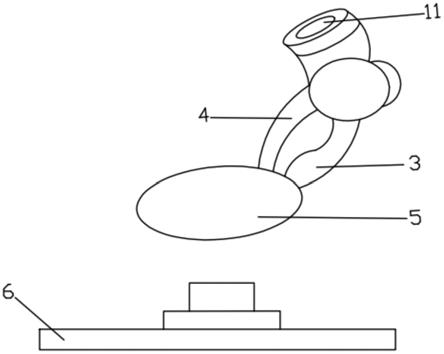
21.图3为一种滑动推杆把手的左视图。
22.其中:1、四指承托部;2、拇指承托部;3、第一手掌承托部;4第二手掌承托部;5、手腕承托部;6、固定底座;7、滑轨;8、凹槽结构;9、滑块;10、金属接触片;11、按压开关。
具体实施方式
23.下面结合附图和实施例对本实用新型的技术方案做进一步的说明。
24.实施例1
25.如图1-2,一种滑动推杆把手,包括开关、导线、把手、滑轨7和固定底座6,所述把手包括手指承托部、手掌承托部和手腕承托部5,所述手指承托部连接手掌承托部,所述手掌承托部连接手腕承托部5一侧,所述手腕承托部5另一侧设有凹槽结构8,所述固定底座6上表面设有滑槽,滑槽底部设有滑轨7,滑轨7与滑轨7上套接有凸起的滑块9,滑块9顶部与手腕承托部5的凹槽结构8配合连接,所述凹槽结构8表面和滑块9表面设有相对应的金属接触片10,所述手指承托部一侧设置有按压开关11,所述按压开关11通过导线连接凹槽结构8的金属接触片10,所述滑块9内设有电子锁,电子锁通过导线连接滑块9的金属接触片10电子锁锁舌与滑轨7相抵。
26.所述把手符合人手部结构,抓握更方便得力。所述凹槽结构8表面和滑块9表面的相对应金属接触片10连接时,接通把手和固定底座6之间的线路,正常情况下把手和固定底座6为锁定状态,电子锁锁舌将滑轨7抵紧,把手不能推动;当按下按压开关11,线路连通,电子锁锁舌收回,把手可前后推动。
27.在具体实施过程中,把手为绝缘橡胶材质结构。绝缘橡胶不仅具有良好的橡胶物理机械性能外,还具有良好的电绝缘性能,安全系数更高。
28.在具体实施过程中,手掌承托部包括第一手掌承托部3和第二手掌承托部4,所述
第一手掌承托部3其一端与手腕承托部5相连,另一端与手指承托部相连,所述第二手掌承托部4其一端与手腕承托部5相连,另一端与手指承托部相连。
29.在具体实施过程中,第一手掌承托部3带有下凹弧度结构。
30.在具体实施过程中,下凹弧度结构适配人手大拇指根部。
31.在具体实施过程中,第一手掌承托部3带有拱起弧度结构。
32.在具体实施过程中,拱起弧度结构适配人手掌心部分。如图3,手掌承托部的弧度变化提高了手部放置时的舒适性。
33.在具体实施过程中,手指承托部包括四指承托部1和拇指承托部2,所述四指承托部1的一侧连接拇指承托部2。
34.在具体实施过程中,四指承托部1符合人体手型的凹凸结构。凹凸结构贴合手指握起时的状态,既提高握力,又增加了舒适度。
35.在具体实施过程中,拇指承托部2向上翘起,按压开关11设置于拇指承托部2的端部。
36.在本实施例中,通常情况下,把手和固定底座6相对应的接触片相连接时,把手和固定底座6的线路接通,设置在固定底座6内的电子锁锁舌将滑轨7抵紧,固定底座6为锁紧状态,把手不能前后推动;当操作人员手持把手时,大拇指按下按压开关11,电子锁将锁舌收回,把手即可进行前后推动操作。
37.显然,本实用新型的上述实施例仅仅是为清楚地说明本实用新型所作的举例,而并非是对本实用新型的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型权利要求的保护范围之内。