1.本实用新型属于自动化设备技术领域,具体涉及一种单电机搬运机械手。
背景技术:
2.随着自动化机器越来越多,搬运机械手在自动化机器中的重要性也越来越大。现在的自动化机器上一般都配备搬运机械手,单电机搬运机械手,一般为倒u型轨道式运行轨迹,z轴上装夹子或吸盘来将产品从一个位置a搬运到另一个位置b,但是单电机倒u型轨道式,加工成本与制作方法复杂,因此一种成本较低、制作方法简单的单电机搬运机械手亟待研究。
技术实现要素:
3.为了解决背景技术中存在的问题,本实用新型提供了一种单电机搬运机械手。
4.本实用新型提供的一种单电机搬运机械手,其特征在于:包括支架,所述支架为“l”型,所述支架一侧固定有齿轮箱,所述齿轮箱另一侧连接有电动机,所述齿轮箱内部设置有第一齿轮、第二齿轮和第三齿轮,所述第一齿轮与电动机连接,所述第一齿轮两侧与第二齿轮和第三齿轮啮合,所述第二齿轮与第三齿轮的中间均设置有传动杆,所述传动杆穿过支架位于支架另一侧连接有旋转臂,所述旋转臂另一端连接有旋转臂连接块,所述旋转臂连接块的底部固定有吸盘固定架,所述吸盘固定架两侧设置有多个对称设置的滑动槽,所述滑动槽上连接有滑动固定杆,所述滑动固定杆底部设置有缓冲吸盘。
5.所述电动机为带原点感应的电动机。
6.所述第一齿轮、第二齿轮和第三齿轮位于齿轮箱内竖直排列,所述第一齿轮位于齿轮箱内部的中间位置,所述第二齿轮和第三齿轮位于第一齿轮的上下两侧。
7.所述传动杆两端位于齿轮箱与支架上均通过轴承转动连接,所述传动杆与旋转臂远离旋转臂连接块的一端固定连接。
8.所述旋转臂连接块通过连接轴与旋转臂转动连接,所述连接轴与旋转臂固定连接。
9.所述吸盘固定架与旋转臂连接块的底部垂直固定。
10.所述滑动固定杆与滑动槽的形状相匹配,所述滑动固定杆与滑动槽滑动连接,所述滑动固定杆位于滑动槽上端设置有螺母,所述滑动固定杆通过螺母的配合与滑动槽固定。
11.本实用新型的有益效果:本装置结构简单,制作成本低,安装快速。
附图说明
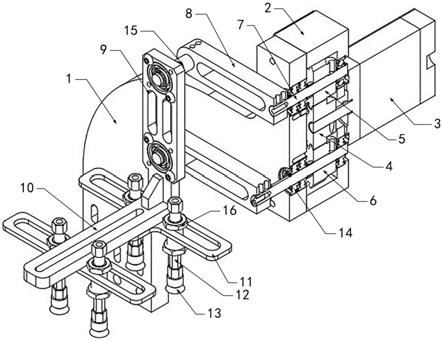
12.图1为本实用新型一种单电机搬运机械手的结构图。
13.(1、支架;2、齿轮箱;3、电动机;4、第一齿轮;5、第二齿轮;6、第三齿轮;7、传动杆;8、旋转臂;9、旋转臂连接块;10、吸盘固定架;11、滑动槽;12、滑动固定杆;13、缓冲吸盘;14、
轴承;15、连接轴;16、螺母)
具体实施方式
14.以下结合附图对本实用新型作进一步说明:
15.本实用新型提供的一种单电机搬运机械手,其特征在于:包括支架1,所述支架1为“l”型,所述支架1一侧固定有齿轮箱2,所述齿轮箱2另一侧连接有电动机3,所述齿轮箱2内部设置有第一齿轮4、第二齿轮5和第三齿轮6,所述第一齿轮4与电动机3连接,所述第一齿轮4两侧与第二齿轮5和第三齿轮6啮合,所述第二齿轮5与第三齿轮6的中间均设置有传动杆7,所述传动杆7穿过支架1位于支架1另一侧连接有旋转臂8,所述旋转臂8另一端连接有旋转臂连接块9,所述旋转臂连接块9的底部固定有吸盘固定架10,所述吸盘固定架10两侧设置有多个对称设置的滑动槽11,所述滑动槽11上连接有滑动固定杆12,所述滑动固定杆12底部设置有缓冲吸盘13。
16.所述电动机3为带原点感应的电动机。
17.所述第一齿轮4、第二齿轮5和第三齿轮6位于齿轮箱2内竖直排列,所述第一齿轮4位于齿轮箱2内部的中间位置,所述第二齿轮5和第三齿轮6位于第一齿轮4的上下两侧。
18.所述传动杆7两端位于齿轮箱2与支架1上均通过轴承14转动连接,所述传动杆7与旋转臂8远离旋转臂连接块9的一端固定连接。
19.所述旋转臂连接块9通过连接轴15与旋转臂8转动连接,所述连接轴15与旋转臂8固定连接。
20.所述吸盘固定架10与旋转臂连接块9的底部垂直固定。
21.所述滑动固定杆12与滑动槽11的形状相匹配,所述滑动固定杆12与滑动槽11滑动连接,所述滑动固定杆12位于滑动槽11上端设置有螺母16,所述滑动固定杆12通过螺母16的配合与滑动槽11固定,滑动固定杆12能够更换为内部上下贯通的滑动固定杆12,同时更换与上下贯通的滑动固定杆12贯通处形状相匹配的缓冲吸盘。
22.本实用新型的工作原理:
23.通过支架1固定本机械手,在使用时,通过电动机3的转动带动第一齿轮4的旋转,由第一齿轮4的转动带动啮合的第二齿轮5和第三齿轮6同向转动,从而使第二齿轮5和第三齿轮6中间设置的传动杆7转动,进而由传动杆7带动旋转臂8进行转动,在旋转臂8转动时,由于重力作用,使旋转臂8连接块始终保持竖直状态,从而将底部吸盘固定架10及固定在吸盘固定架10两侧的滑动槽11、滑动固定杆12和缓冲吸盘13按照倒u型轨道从位置a移动至位置b。
24.能够通过移动滑动固定杆12位于滑动槽11内的位置,改变所搬运物体的大小,或是通过更换上下贯通的滑动固定杆12与缓冲吸盘13,并通过外接气缸的方式,将气缸与上下贯通的滑动固定杆12顶端连接,增加本机械手依靠缓冲吸盘13吸附的稳定性。
25.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,具体实施方式中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
技术特征:
1.一种单电机搬运机械手,其特征在于:包括支架(1),所述支架(1)为“l”型,所述支架(1)一侧固定有齿轮箱(2),所述齿轮箱(2)另一侧连接有电动机(3),所述齿轮箱(2)内部设置有第一齿轮(4)、第二齿轮(5)和第三齿轮(6),所述第一齿轮(4)与电动机(3)连接,所述第一齿轮(4)两侧与第二齿轮(5)和第三齿轮(6)啮合,所述第二齿轮(5)与第三齿轮(6)的中间均设置有传动杆(7),所述传动杆(7)穿过支架(1)位于支架(1)另一侧连接有旋转臂(8),所述旋转臂(8)另一端连接有旋转臂连接块(9),所述旋转臂连接块(9)的底部固定有吸盘固定架(10),所述吸盘固定架(10)两侧设置有多个对称设置的滑动槽(11),所述滑动槽(11)上连接有滑动固定杆(12),所述滑动固定杆(12)底部设置有缓冲吸盘(13)。2.根据权利要求1所述的一种单电机搬运机械手,其特征在于:所述电动机(3)为带原点感应的电动机。3.根据权利要求1所述的一种单电机搬运机械手,其特征在于:所述第一齿轮(4)、第二齿轮(5)和第三齿轮(6)位于齿轮箱(2)内竖直排列,所述第一齿轮(4)位于齿轮箱(2)内部的中间位置,所述第二齿轮(5)和第三齿轮(6)位于第一齿轮(4)的上下两侧。4.根据权利要求1所述的一种单电机搬运机械手,其特征在于:所述传动杆(7)两端位于齿轮箱(2)与支架(1)上均通过轴承(14)转动连接,所述传动杆(7)与旋转臂(8)远离旋转臂连接块(9)的一端固定连接。5.根据权利要求1所述的一种单电机搬运机械手,其特征在于:所述旋转臂连接块(9)通过连接轴(15)与旋转臂(8)转动连接,所述连接轴(15)与旋转臂(8)固定连接。6.根据权利要求1所述的一种单电机搬运机械手,其特征在于:所述吸盘固定架(10)与旋转臂连接块(9)的底部垂直固定。7.根据权利要求1所述的一种单电机搬运机械手,其特征在于:所述滑动固定杆(12)与滑动槽(11)的形状相匹配,所述滑动固定杆(12)与滑动槽(11)滑动连接,所述滑动固定杆(12)位于滑动槽(11)上端设置有螺母(16),所述滑动固定杆(12)通过螺母(16)的配合与滑动槽(11)固定。
技术总结
本实用新型提供的一种单电机搬运机械手,其特征在于:包括支架,所述支架为“L”型,所述支架一侧固定有齿轮箱,所述齿轮箱另一侧连接有电动机,所述齿轮箱内部设置有第一齿轮、第二齿轮和第三齿轮,所述第一齿轮与电动机连接,所述第一齿轮两侧与第二齿轮和第三齿轮啮合,所述第二齿轮与第三齿轮的中间均设置有传动杆,所述传动杆穿过支架位于支架另一侧连接有旋转臂,所述旋转臂另一端连接有旋转臂连接块,所述旋转臂连接块的底部固定有吸盘固定架,所述吸盘固定架两侧设置有多个对称设置的滑动槽,所述滑动槽上连接有滑动固定杆,所述滑动固定杆底部设置有缓冲吸盘。滑动固定杆底部设置有缓冲吸盘。滑动固定杆底部设置有缓冲吸盘。
技术研发人员:罗超超 曾敏辉 刘卫军
受保护的技术使用者:深圳市一腾自动化科技有限公司
技术研发日:2021.09.29
技术公布日:2022/2/11