1.本发明属于智能机器人领域,涉及一种钟摆式的滚动机器人,特别涉及一种带观瞄抓捕系统的滚动机器人及其观瞄抓捕方法。
背景技术:
2.机器人是一种通过手动或者自动控制,模拟人类完成各种指令的一种智能化装置。机器人可以代替人体进行各种复杂精细的操作,也可以代替人类进入复杂、危险的环境进行探索作业,保证人员安全。现有的机器人有固定设置、在一定区域范围内进行操作的固定式机器人,也有可移动的,通过机械腿、履带、滚轮等结构实现机器人的行走移动。移动式机器人可以代替人类进入一些复杂、危险的场景,如有毒害气体的空间、火场等,采集信号,指导救援。
3.滚动机器人是移动式机器人的一种,滚动机器人的壳体可以是任何适合滚动的形状,如圆球形、椭球型、鼓型、面数较多的多面体型等等,其依靠壳体自身的滚动行进。
4.抓捕人员在追捕目标时,需要使用多种防护设备,如钢叉、盾牌、硬质防护服等,才能靠近并抓获目标。但是许多目标具有危险性,抓捕人员近距离接触,将面临极大的生命危险,而且抓捕人员携带过多的防护设备保障安全的同时,也降低了行动的灵活性,同时让目标提前警惕,不利于安全。因此,采用智能化的滚动机器人代替抓捕人员,不仅行进速度快,而且隐蔽性高,突然性强,可以对目标进行及时处理,避免抓捕人员与目标的直接接触。
技术实现要素:
5.本发明的目的在于解决抓捕人员抓捕目标需要多种防护设备,降低了灵活性、隐蔽性,且与目标直接接触过程中存在危险的问题,提供一种带观瞄抓捕系统的滚动机器人及其观瞄抓捕方法,通过滚动机器人挂载用于识别定位的观瞄机构和用于捕捉的抓捕机构,通过远程识别操控完成抓捕,避免抓捕人员与目标的直接接触,保障抓捕过程中的安全。
6.本发明解决其技术问题所采用的技术方案是:一种带观瞄抓捕系统的滚动机器人,包括可滚动的壳体,所述壳体左右侧壁之间架设水平设置的主轴,主轴可相对壳体转动,主轴中心设有水平设置并与主轴相互垂直的副轴,副轴可自转并可随主轴转动,副轴下方吊设有内摆动块;所述主轴的两端伸出壳体之外并分别设置有观瞄抓捕系统,所述观瞄抓捕系统包括设置在主轴外端的云台挂架,云台挂架上设置有可横向转动的舵机,舵机上搭载有气动网枪发射器,所述观瞄抓捕系统还包括与云台挂架相对固定的广角相机、与气动网枪发射器相对固定的长焦相机。
7.本装置中,观瞄抓捕系统随滚动机器人滚动行走,滚动机器人行走时,利用内摆动块的摆动产生前进、后退以及转弯的趋势,从而驱动壳体转动,壳体匀速转动过程中,主轴相对静止状态转动一定的角度,并保持稳定姿势。主轴两端的观瞄抓捕系统利用云台补偿主轴转动产生的俯仰角度,使云台挂架保持水平状态,使气动网枪发射器水平。舵机可以调
节气动网枪发射器的偏航角度,进行横向的摆动旋转,使气动网枪发射器能指向抓捕目标。主轴两侧的广角相机用于获取大范围的图像,从而寻找目标,长焦相机用于聚焦锁定疑似目标,获取更加清晰的图像,以确认目标,并辅助气动网枪发射器的瞄准。当锁定并确认目标后,气动网枪发射器发射抓捕网,抓捕目标对象。
8.作为优选,所述云台挂架上设有检测俯仰角度的陀螺仪以及调节俯仰角的云台电机,所述云台电机与主轴同轴设置。
9.云台电机上电后,控制器通过读取陀螺仪对应角速度的值,实时改变云台电机的输出,来保证悬挂在云台挂架上面的气动网枪发射器机体的姿态与地面保持不变。该控制问题可以描述为,期望的俯仰角为20
°
,在滚动机器人运动过程中,由于晃动及重力的影响,会导致俯仰角出现相应的变化。此时,控制板输入是期望的俯仰角20
°
,反馈系统通过陀螺仪,读取到实时的俯仰角,两者做差,得到角度的偏差,把该偏差送入到控制器中,控制器可以通过传统的pid等自动控制算法,通过调参整定,得到最优的参数。控制器通过控制算法,换算出云台电机所需要的电流值,最终输出到云台电机;云台电机通过反向的力矩,来保持云台挂架装置的俯仰角保持不变。控制的算法除了传统的pid,也可以采用模糊控制,神经网络控制等。对于pid参数的整定方法,可以采取传统的临界比例法,衰减曲线法等。
10.作为优选,所述舵机转轴与主轴垂直。舵机转轴上安装有轴承,轴承通过固定结构与气动网枪发射器连接,舵机外壳和云台挂架刚性连接,减少舵机输出转轴在滚动机器人运动过程中颠簸产生的弯矩,防止舵机输出转轴损坏,延长整体结构使用寿命。舵机上电后,接收控制器指令,控制气动网枪发射器的偏航角度,使其朝向始终正对锁定目标。
11.作为优选,所述广角相机的可视角度为90~120度,主轴两侧的观瞄抓捕系统的广角相机在壳体前方视野交叠。
12.作为优选,所述长焦相机的可视角度为15~30度。
13.作为优选,两侧观瞄抓捕系统对称设置。
14.作为优选,所述气动网枪发射器包括网枪本体,网枪本体上部设置有固定圆筒,固定圆筒内设有用弹簧预紧的撞针,撞针一侧设有卡扣,所述卡扣的外端设有推拉式电磁铁。
15.一种观瞄抓捕方法,使用上述的带观瞄抓捕系统的滚动机器人,包括以下步骤:步骤一、执行系统初始化,开启广角相机和长焦相机同时采集画面,检测行人目标,绘制行人检测框,将视频传输到远程上位机软件中;步骤二、在广角视频流中,借助行人检测框的辅助,选择要被跟踪的目标,并进行跟踪;步骤三、根据被跟踪目标相对于滚动机器人距离与角度,计算当前偏航舵机需要偏转的角度,控制偏航舵机转向,使气动网枪发射器始终朝向被跟踪目标,并控制目标始终处在长焦镜头的中心;步骤四、根据长焦镜头中更为清晰的目标画面,判断该目标是否为打击目标,若不是则重新退回第二步,若是则下发发射命令,推拉式电磁铁驱动卡扣,触发撞针,气动网枪发射器发射抓捕网,抓捕目标对象。
16.本发明采用了滚动机器人作为载体,搭载观瞄抓捕系统,利用广角相机获取前方大范围的情景图像,利用长焦相机聚焦并二次识别目标,并辅助气动网枪发射器锁定并抓捕目标,灵活性高,隐蔽性好,通过远程识别操控完成抓捕,避免抓捕人员与目标的直接接
触,保障抓捕过程中的安全。
附图说明
17.图1是本发明一种滚动机器人的内部结构示意图。
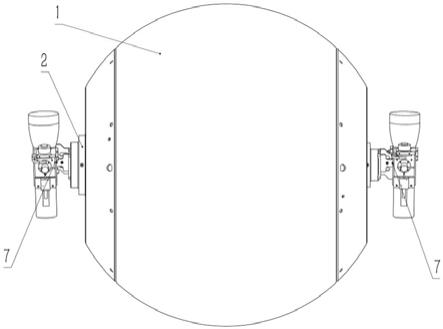
18.图2是本发明一种搭载了观瞄抓捕系统的滚动机器人结构示意图。
19.图3是本发明一种搭载了观瞄抓捕系统的滚动机器人的侧向结构示意图。
20.图4是本发明的一种观瞄抓捕系统示意图。
21.图5是本发明的一种气动网枪发射器的触发结构示意图。
22.图6是本发明的一种云台挂架装置结构示意图。
23.图7是本发明的一种观瞄抓捕系统整体结构示意图。
24.图8是本发明的一种广角相机视野交叠示意图。
25.图9是本发明的一种观瞄抓捕控制流程图。
26.图中:1、壳体,2、主轴,3、副轴,4、内摆动块,5、主轴驱动装置,6、副轴驱动装置,7、观瞄抓捕系统,8、气动网枪发射器,9、固定圆筒,10、弹簧,11、撞针,12、卡扣,13、推拉式电磁铁,14、云台电机,15、舵机,16、云台挂架,17、广角相机,18、长焦相机。
具体实施方式
27.下面通过具体实施例并结合附图对本发明进一步说明。
28.实施例:一种带观瞄抓捕系统的滚动机器人,如图2、3所示。滚动机器人包括可滚动的壳体,壳体为环绕水平主轴2的回转体结构,壳体1可以为球形、椭球型、圆柱型、鼓型等等。本实施例中壳体结构如图1所示为球形,壳体为左右对称结构,壳体环绕主轴的环周中部球面型凸起即为滚动机器人滚动时与地面接触的主滚道。
29.壳体内部结构如图1所示,壳体1左右侧壁之间架设水平设置的主轴2,主轴2可相对壳体1转动,主轴中心设有水平设置并与主轴相互垂直的副轴3,副轴3可自转并可随主轴1转动,副轴下方吊设有内摆动块4。当滚动机器人需要前进或者后退时,主轴转动,副轴设置在主轴中部且两端悬空,因此副轴被主轴带动绕主轴转动一个角度,从而带动内摆动块向前或者向后摆动,造成整体质心的前移或者后移,从而带动滚动机器人前进或者后退。当滚动机器人需要转弯时,主轴持续转动保持滚动机器人稳定前进或者后退,同时副轴绕自身轴线转动,带动内摆动块向左侧或者右侧摆动,使整体质心向一侧偏移,使滚动机器人向一侧倾斜,从而实现转弯。壳体内还设有控制系统,所述控制系统包括设置在壳体内的图像处理单元,传感器、pid控制器以及电源模块等。其中图像处理单元为nvidia公司生产的jetson nano控制板,传感器包含三轴陀螺仪、加速度传感器和码盘等,一起固定在滚动机器人内部的主轴上,电源线与信号传输线通过中空的主轴,与外部结构相连接,实现系统的整体功能。
30.滚动机器人搭载观瞄抓捕系统后如图2、3所示。主轴2的两端伸出壳体1之外并分别设置有观瞄抓捕系统7,壳体两侧的观瞄抓捕系统对称设置。观瞄抓捕系统包括设置在主轴2外端的云台挂架,云台挂架16的结构如图6、7所示,云台挂架16上设有检测俯仰角度的陀螺仪以及调节俯仰角的云台电机14,所述云台电机14与主轴2同轴设置。云台挂架上设置有可横向转动的舵机15,舵机15输出的转轴上搭载有气动网枪发射器8。舵机15转轴与主轴
2垂直。云台挂架16上固定有广角相机17、气动网枪发射器上固定长焦相机18。如图8所示,广角相机17的可视角度为90度,主轴2两侧的观瞄抓捕系统的广角相机17在壳体1前方视野交叠。长焦相机的可视角度为25度左右,可以聚焦获取疑似目标的清晰图像,并帮助气动网枪发射器8锁定目标。本实施例汇总,气动网枪发射器选用成都警安器材bzw-ja01抓捕网枪。
31.气动网枪发射器8结构如图5所示,气动网枪发射器包括网枪本体,网枪本体上部设置有固定圆筒9,固定圆筒内设有用弹簧10预紧的撞针11,撞针一侧设有卡扣12,所述卡扣的外端设有推拉式电磁铁13。
32.本装置的观瞄抓捕流程包括以下步骤:步骤一、执行系统初始化,开启广角相机和长焦相机同时采集画面,检测行人目标,绘制行人检测框,将视频传输到远程上位机软件中;步骤二、在广角视频流中,借助行人检测框的辅助,选择要被跟踪的目标,并进行跟踪;步骤三、根据被跟踪目标相对于滚动机器人距离与角度,计算当前偏航舵机需要偏转的角度,控制偏航舵机转向,使气动网枪发射器始终朝向被跟踪目标,并控制目标始终处在长焦镜头的中心;步骤四、根据长焦镜头中更为清晰的目标画面,判断该目标是否为打击目标,若不是则重新退回第二步,若是则下发发射命令,推拉式电磁铁驱动卡扣,触发撞针,气动网枪发射器发射抓捕网,抓捕目标对象。