1.本发明涉及机械手设备领域,尤其涉及一种带翻转结构的智能机械手。
背景技术:
2.机械手,也被称为自动手,能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,广泛应用于机械制造冶金部门。机械手主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。
3.现有的小型收割机中,在收割稻谷时,需要一名驾驶员和一名辅助人员进行操作,驾驶员主要操作收割机的行进反向进行收割,辅人员对收割机收割的稻谷进行装填进入蛇皮袋中,并将填满稻谷的蛇皮袋捆扎从收割机中丢下,然后进行下一个装填工作,这样在连续收割作业时,辅助人员的操作劳动强度大,需要接触机械手辅助工作,但现有的机械手摆动幅度过大不适宜在狭小的收割机上布置,且收割后,无法快速得到稻谷的产量。
4.因此,有必要提供一种新的带翻转结构的智能机械手解决上述技术问题。
技术实现要素:
5.为解决上述技术问题,本发明提供一种结构简单,便于在狭小空间内进行夹持翻转且可自动计量载重的带翻转结构的智能机械手。
6.本发明提供的带翻转结构的智能机械手包括:机械臂、旋转机构、电动缸、摆动机构、连接架、夹持机构和承重计量组件,用于带动机械手转动的所述旋转机构固定安装于机械臂上,且旋转机构内安装有电动缸,用于带动机械手摆动的所述摆动机构固定安装于电动缸的伸缩端上,且摆动机构的输出端上固定安装有连接架,用于实现机械手夹持物料的所述夹持机构固定安装于连接架上,用于对夹持的物料进行承重计量的所述承重计量组件固定安装于夹持机构上。
7.优选的,所述旋转机构包括旋转轴、旋转支架、第一圆锥齿轮、第一伺服电机和第二圆锥齿轮,所述旋转轴转动安装机械臂上,且旋转轴上固定安装有旋转支架,所述旋转支架与电动缸固定连接,所述第一圆锥齿轮套设于旋转轴的中部,所述第一伺服电机固定安装于机械臂上并位于旋转轴一侧,且第一伺服电机的输出轴上套设有第二圆锥齿轮,所述第二圆锥齿轮与第一圆锥齿轮啮合。
8.优选的,所述电动缸型号为tp-c4gr圆筒型双导杆电动缸。
9.优选的,所述摆动机构包括连接箱、摆动杆、第一直齿轮、第二伺服电机和第二直齿轮,所述连接箱与电动缸的伸缩端固定连接,所述摆动杆转动安装于连接箱上,且摆动杆一端穿过连接箱与连接架固定连接,摆动杆另一端套设有第一直齿轮,所述第二伺服电机
固定安装于连接箱的侧壁上,且第二伺服电机的输出轴伸入连接箱内并套设有第二直齿轮,所述第二直齿轮与第一直齿轮啮合。
10.优选的,所述第二伺服电机设有两个,且两个第二伺服电机既有连接箱对称设置。
11.优选的,所述夹持机构包括支撑杆、支撑梁、固定爪、活动爪和液压缸,所述支撑杆固定安装于连接架上,两个所述支撑梁对称安装于支撑杆上,且两个支撑梁一侧均固定连接有固定爪,两个支撑梁位于固定爪的一侧均铰接有活动爪,所述活动爪的侧壁上焊接有连接座,所述液压缸铰接的支撑梁的前端,且液压缸的活塞杆与连接座铰接。
12.优选的,两个所述支撑梁与连接架之间安装有加强肋板,所述固定爪和活动爪的夹持面均粘贴有橡胶条。
13.优选的,所述承重计量组件包括底板、压力传感器、承载板和数字显示屏,所述底板固定安装于支撑杆的底端,所述承载板固定安装于底板上,且承载板内嵌装有压力传感器,所述数字显示屏固定安装于连接架上,且数字显示屏与压力传感器电性连接。
14.优选的,所述机械臂远离旋转机构一端固定连接有安装座,所述安装座焊接有长条板,所述长条板上远离机械臂的一端固定安装有控制箱,所述控制箱通过电源线与外置电源连接,且控制箱通过线缆与第一伺服电机、电动缸、第二伺服电机、液压缸和压力传感器均电性连接。
15.优选的,所述长条板上位于机械臂和控制箱之间还设有辅助支架,两个所述辅助支架对称设置于长条板上,且辅助支架包括固定座、导向杆、滑动块、弹簧和挂杆,所述固定座固定安装于长条板上,且固定座上贯穿设置有安装腔,所述导向杆固定安装于安装腔内,且导向杆上滑动连接有滑动块,所述滑动块上固定安装有挂杆,所述弹簧套设在导向杆上,且弹簧一端与滑动块底端固定连接,弹簧另一端与固定座固定连接。
16.与相关技术相比较,本发明提供的带翻转结构的智能机械手具有如下有益效果:
17.1、通过将旋转机构和摆动机构利用电动缸连接在一起,然后一体布置与机械臂上,缩小了机械手的体积,便于安装于在收割机的狭小的稻谷放料工位上,再配合夹持机构对装填好稻谷的蛇皮袋进行夹持转移,便于利用机械手进行稻谷的装填和转移,减轻的辅助人员的劳动强度;
18.2、通过设置承重计量组件便于在稻谷装填时,对稻谷进行称重,并通过控制每个蛇皮袋的装填重量保持一致,便于收割后,通过统计装填的蛇皮袋数量直接得出稻谷的产量,便于对稻谷进行产量统计;
19.3、通过设置辅助支架,将蛇皮袋排列好插设在挂杆上,便于快速移动撑开蛇皮袋进行稻谷装填。
附图说明
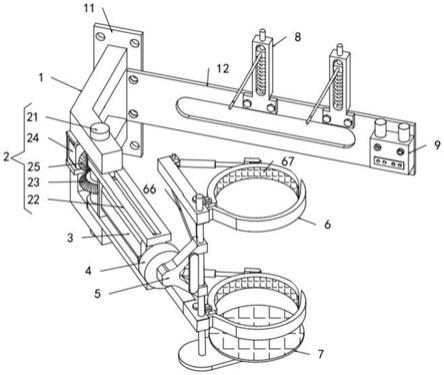
20.图1为本发明提供的带翻转结构的智能机械手的一种较佳实施例的结构示意图;
21.图2为图1所示的正视图;
22.图3为图1所示的俯视图;
23.图4为图1所示的摆动机构的结构示意图;
24.图5为图1所示的辅助支架的机构示意图。
25.图中标号:1、机械臂;11、安装座;12、长条板;2、旋转机构;21、旋转轴;22、旋转支
架;23、第一圆锥齿轮;24、第一伺服电机;25、第二圆锥齿轮;3、电动缸;4、摆动机构;41、连接箱;42、摆动杆;43、第一直齿轮;44、第二伺服电机;45、第二直齿轮;5、连接架;6、夹持机构;61、支撑杆;62、支撑梁;63、固定爪;64、活动爪;641、连接座;65、液压缸;66、加强肋板;67、橡胶条;7、承重计量组件;71、底板;72、压力传感器;73、承载板;74、数字显示屏;8、辅助支架;81、固定座;82、导向杆;83、滑动块;84、弹簧;85、挂杆;9、控制箱。
具体实施方式
26.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
27.以下结合具体实施例对本发明的具体实现进行详细描述。
28.请参阅图1至图5,本发明实施例提供的一种带翻转结构的智能机械手,所述带翻转结构的智能机械手包括机械臂1、旋转机构2、电动缸3、摆动机构4、连接架5、夹持机构6和承重计量组件7。
29.用于带动机械手转动的旋转机构2固定安装于机械臂1上,且旋转机构2内安装有电动缸3,用于带动机械手摆动的摆动机构4固定安装于电动缸3的伸缩端上,且摆动机构4的输出端上固定安装有连接架5,用于实现机械手夹持物料的夹持机构6固定安装于连接架5上,用于对夹持的物料进行承重计量的承重计量组件7固定安装于夹持机构6上。
30.需要说明的是:使用时,将机械臂1安装于收割机的稻谷装填工位上,然后利用旋转机构2带动电动缸3进行转动,电动缸3可以推动摆动机构4进行伸缩位移并伸入稻谷装填工位上,再利用夹持机构6配合承重计量组件7对装填好的稻谷的蛇皮袋进行夹持,夹持后通过旋转机构2和电动缸3配和将蛇皮袋从装填工位中移出,通过摆动机构4将蛇皮袋由原有的竖直状摆动至水平状,然后去夹持机构6松开,将蛇皮袋从收割机上排出,然后摆动机构4带动夹持机构6复位并进入下一个转移循环中,这样通过机械手来对装填好的稻谷进行转移,减轻的辅助人员的劳动强度,且通过承重计量组件7可以便于控制蛇皮袋的装载量,便于后期产量统计。
31.参考图1所示,旋转机构2包括旋转轴21、旋转支架22、第一圆锥齿轮23、第一伺服电机24和第二圆锥齿轮25,旋转轴21转动安装机械臂1上,且旋转轴21上固定安装有旋转支架22,旋转支架22与电动缸3固定连接,第一圆锥齿轮23套设于旋转轴21的中部,第一伺服电机24固定安装于机械臂1上并位于旋转轴21一侧,且第一伺服电机24的输出轴上套设有第二圆锥齿轮25,第二圆锥齿轮25与第一圆锥齿轮23啮合;
32.需要说明的是:旋转机构2使用时,通过控制第一伺服电机24转动,第一伺服电机24通过第二圆锥齿轮25和第一圆锥齿轮23啮合传动,从而带动旋转轴21进行转动,旋转轴21带动旋转支架22进行转动,从而带动电动缸3进行旋转,实现水平方向上的旋转自由移动,
33.其中,电动缸3型号为tp-c4gr圆筒型双导杆电动缸,这样电动缸3通过双导杆的作用,在推动摆动机构4过程中更加稳定。
34.参考图1、图2和图4所示,摆动机构4包括连接箱41、摆动杆42、第一直齿轮43、第二伺服电机44和第二直齿轮45,连接箱41与电动缸3的伸缩端固定连接,摆动杆42转动安装于
连接箱41上,且摆动杆42一端穿过连接箱41与连接架5固定连接,摆动杆42另一端套设有第一直齿轮43,第二伺服电机44固定安装于连接箱41的侧壁上,且第二伺服电机44的输出轴伸入连接箱41内并套设有第二直齿轮45,第二直齿轮45与第一直齿轮43啮合。
35.需要说明的是:摆动机构4使用时,通过控制第二伺服电机44进行转动第二伺服电机44通过第一直齿轮43和第二直齿轮45啮合传动,带动摆动杆42进行转动,从而带动连接架5进行摆动,最终通过连接架5带动夹持机构6进行摆动。
36.其中,第二伺服电机44设有两个,且两个第二伺服电机44既有连接箱41对称设置,这样通过两个第二伺服电机44同步控制,可以进行双重保护,防止其中任意一个第二伺服电机44故障时,摆动机构4仍能正常工作,且设置两个第二伺服电机44共同启动工作,可以减少单个第二伺服电机44输出轴的轴向力,延长第二伺服电机44的使用寿命。
37.参考图1和图2所示,夹持机构6包括支撑杆61、支撑梁62、固定爪63、活动爪64和液压缸65,支撑杆61固定安装于连接架5上,两个支撑梁62对称安装于支撑杆61上,且两个支撑梁62一侧均固定连接有固定爪63,两个支撑梁62位于固定爪63的一侧均铰接有活动爪64,活动爪64的侧壁上焊接有连接座641,液压缸65铰接的支撑梁62的前端,且液压缸65的活塞杆与连接座641铰接。
38.需要说明的是:夹持机构6使用时,通过液压缸65控制活动爪64靠近固定爪63进行夹持,液压缸65的活塞杆伸出时,活塞杆通过连接座641推动活动爪64靠近固定爪63直至完成夹持,活塞杆收缩时,通过连接座641拉动活动爪64远离固定爪63直至完成松开夹持,这里液压缸65可以替换为电动伸缩杆。
39.其中,两个支撑梁62与连接架5之间安装有加强肋板66,固定爪63和活动爪64的夹持面均粘贴有橡胶条67,这样加强肋板66提高了支撑梁62的支撑强度,设置橡胶条67便于对夹持的蛇皮袋进行保护,防止划破蛇皮袋。
40.参考图1和图2所示,承重计量组件7包括底板71、压力传感器72、承载板73和数字显示屏74,底板71固定安装于支撑杆61的底端,承载板73固定安装于底板71上,且承载板73内嵌装有压力传感器72,数字显示屏74固定安装于连接架5上,且数字显示屏74与压力传感器72电性连接。
41.需要说明的是:承重计量组件7使用时,在初始状态下,蛇皮袋未填充稻谷时,将蛇皮袋放置在承载板73上,此时夹持机构6并未夹持,然后向蛇皮袋内填充稻谷,并通过观察数字显示屏74进行重量控制,装填至定量后,进行捆扎,最后利用机械手进行转移,这样便于收割后直接统计稻谷产量。
42.参考图1和图5所示,机械臂1远离旋转机构2一端固定连接有安装座11,安装座11焊接有长条板12,长条板12上远离机械臂1的一端固定安装有控制箱9,控制箱9通过电源线与外置电源连接,且控制箱9通过线缆与第一伺服电机24、电动缸3、第二伺服电机44、液压缸65和压力传感器72均电性连接。
43.需要说明的是:这样利用安装座11上开设的螺纹孔便于将机械臂1固定安装在收割机的稻谷装填工位上,辅助人员通过控制箱9可以轻松控制机械手进行工作。
44.其中,长条板12上位于机械臂1和控制箱9之间还设有辅助支架8,两个辅助支架8对称设置于长条板12上,且辅助支架8包括固定座81、导向杆82、滑动块83、弹簧84和挂杆85,固定座81固定安装于长条板12上,且固定座81上贯穿设置有安装腔,导向杆82固定安装
于安装腔内,且导向杆82上滑动连接有滑动块83,滑动块83上固定安装有挂杆85,弹簧84套设在导向杆82上,且弹簧84一端与滑动块83底端固定连接,弹簧84另一端与固定座81固定连接,这样在装填稻谷前,将蛇皮袋插设在挂杆85上,便于快速撑开蛇皮袋进行装填稻谷,且在弹簧84的作用下,蛇皮带在未装填稻谷时,使用位于承载板73的上方,当承载至一定量稻谷时,蛇皮袋带动挂杆85和滑动块83向下滑动接触承载板73,当装填稻谷的蛇皮袋在固定爪63的辅助支撑下能站立时,将蛇皮袋取下,进行独立测量,其他的蛇皮袋在弹簧84和挂杆85的作用下进行复位,便于下一次进行装填,这样可以很好地对稻谷的装填和计重进行辅助
45.本发明提供的工作原理如下:
46.使用时,将机械臂1通过安装座11固定安装在收割机上,然后将装填稻谷的蛇皮袋插设在挂杆85上,然后控制箱9通过控制第一伺服电机24转动,第一伺服电机24通过第二圆锥齿轮25和第一圆锥齿轮23啮合传动,从而带动旋转轴21进行转动,旋转轴21带动旋转支架22进行转动,从而带动电动缸3进行旋转,再控制电动缸3伸缩将夹持机构6和承重计量组件7放置在收割机装填工位上,其中,承重计量组件7的承载板73在初始状态下位于蛇皮袋的下方,蛇皮袋装填至一定量的稻谷后从挂杆85上滑下,利用压力传感器72和数字显示屏74配合对蛇皮袋的装载量进行实时监控,装填至定量后,定制装填,对蛇皮袋进行捆扎,再通过控制箱9控制液压缸65的活塞杆伸出时,活塞杆通过连接座641推动活动爪64靠近固定爪63直至完成夹持,然后在控制旋转机构2和电动缸3工作将夹持固定好的蛇皮袋转移出稻谷装填工位,转移出后,控制第二伺服电机44进行转动第二伺服电机44通过第一直齿轮43和第二直齿轮45啮合传动,带动摆动杆42进行转动,从而带动连接架5进行摆动,直至将蛇皮袋从竖直状摆动至水平状,然后控制液压缸65活塞杆收缩时,通过连接座641拉动活动爪64远离固定爪63直至完成松开夹持,完成一次转移,在控制第二伺服电机44反转,使然夹持机构6和承重计量组件7复位,然后重复上述循环,进行稻谷收割装填转移。
47.本发明中涉及的电路以及控制均为现有技术,在此不进行过多赘述。
48.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。