1.本实用新型涉及食品平移旋转机械领域,尤其涉及一种用于食品智能切片的夹持平移旋转装置。
背景技术:
2.现有食品,如槟榔的切片主要是通过夹具将槟榔夹持到切刀下,或者是槟榔自由落入固定形状的槟榔模具中,这两种方式由于槟榔形状的多样性,夹持或落入模具中的槟榔,其位置和方向在一定范围内有很大的随意性,而切刀的位置一般都是固定的,因此切出来的槟榔的切缝和理想的切缝存在偏差,从而影响槟榔切片品质。
3.而且由于夹具不能调整大小和方向,不同大小的槟榔进入夹具中其位置具有一定的随意性,因此切片的刀口位置和方向也存在一定的随意性,可能不是理想的位置和方向,这样也会使有些槟榔降低了等级,甚至会把某些槟榔切废导致成品率的下降。
技术实现要素:
4.本实用新型的目的是提供一种用于食品智能切片的夹持平移旋转装置。
5.实现本实用新型目的的技术方案是:一种用于食品智能切片的夹持平移旋转装置,包括滑台、设于滑台上的第一旋转机构和设于第一旋转机构上的第二旋转机构,所述第一旋转机构和第二旋转机构沿所述滑台同时前后运动,所述第一旋转机构沿所述滑台前后运动的轴线左右方向实现第一旋转运动,所述第二旋转机构沿所述第一旋转机构实现第二旋转运动。
6.作为优选,所述第一旋转机构包括设于滑台连接板上的用于安装第一轴承的第一轴承座和用于安装第一电机减速机的电机安装座,所述滑台连接板沿所述滑台进行前后运动,所述第一电机减速机通过第一轴承结合所述第二旋转机构实现左右角度偏移。
7.作为优选,所述滑台连接板为l型连接板,所述l型连接板一端与滑台连接,另一端安装所述电机安装座。
8.作为优选,l型连接板所述一端的左右两侧设有限位机构。
9.作为优选,所述第二旋转机构包括与所述第一轴承上的轴承套径向位置垂直连接的旋转连接板,还包括设于旋转连接板上的第二轴承座和第二电机减速机,所述第二电机减速机通过第二轴承座上的第二轴承带动旋转执行机构实现待切割食品的顺时针/逆时针旋转。
10.作为优选,所述旋转执行机构包括设于第二轴承的轴承套上的电爪连接板和设于电爪连接板上的电爪,所述电爪上设有用于夹抓待切割食品的电爪手指。
11.作为优选,所述第一电机减速机和第二电机减速机的动力输出方向相对设置。
12.采用了上述技术方案,本实用新型具有以下的有益效果:(1)本实用新型通过将夹持的槟榔进行左右的移位和旋转,能将待切的槟榔准确移位到所需的位置,达到预设的理想切缝和刀锋的高度重合,从而提高槟榔切片的品质,提高槟榔的等级。
13.(2)本实用新型通过两个旋转电机实现槟榔的旋转和左右移动,结构简单、可靠性高,结构的宽度减小很大,有利于多组结构并行使用。
14.(3)能根据槟榔的大小、形状和方位,能将槟榔的预设切缝(一条或两条)准确的移位到刀锋下,实现预设切缝和刀锋的高度重合,因此该机构能实现切一刀或切两刀,两种都能保证槟榔切片的品质,槟榔的切缝具有确定性。
附图说明
15.为了使本实用新型的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本实用新型作进一步详细的说明,其中
16.图1为本实用新型的结构示意图;
17.图2为本实用新型的主视图;
18.图3为本实用新型的右视图;
19.图4为本实用新型的左视图。
具体实施方式
20.实施例一
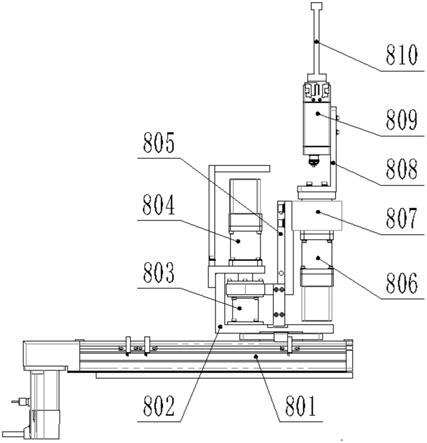
21.见图1至图4,本实施例的一种用于食品智能切片的夹持平移旋转装置,包括滑台801、设于滑台上的第一旋转机构和设于第一旋转机构上的第二旋转机构,所述第一旋转机构和第二旋转机构沿所述滑台同时前后运动,所述第一旋转机构沿所述滑台前后运动的轴线左右方向实现第一旋转运动,所述第二旋转机构沿所述第一旋转机构实现第二旋转运动。
22.所述滑台连接板为l型连接板,所述l型连接板一端与滑台连接,另一端安装所述电机安装座。
23.l型连接板所述一端的左右两侧设有限位机构。
24.所述第一旋转机构包括设于滑台连接板802上的用于安装第一轴承的第一轴承座803和用于安装第一电机减速机804的电机安装座,所述滑台连接板沿所述平移滑台进行前后运动,所述第一电机减速机通过第一轴承带动所述第二旋转机构实现左右角度偏移。所述第一旋转运动结合第二旋转运动就是为了实现该左右平移。
25.所述第二旋转机构包括与所述第一轴承上的轴承套径向位置垂直连接的旋转连接板805,还包括设于旋转连接板上的第二轴承座807和第二电机减速机806,所述第二电机减速机通过第二轴承座上的第二轴承带动旋转执行机构实现待切割槟榔的顺时针/逆时针旋转。
26.当槟榔理想切线与切刀上下不重合时,第一旋转与第二旋转通过旋调整槟榔位置与切刀位置完全吻合。
27.第一旋转机构和第二旋转机构的综合运动实现待切割食品的平移和旋转。
28.所述旋转执行机构包括设于第二轴承的轴承套上的电爪连接板808和设于电爪连接板上的电爪809,所述电爪上设有用于夹抓待切割槟榔的电爪手指810。
29.所述第一电机减速机和第二电机减速机的动力输出方向相对设置。
30.具体实施时,滑台801上的滑板向前平移,带动整个机构向前移动,当电爪手指810
到达前端送来的槟榔位置时,电爪手指810将槟榔夹持住,根据槟榔的实际位置和方位,通过第一电机减速机804的旋转结合第二电机减速机806实现夹持的槟榔向左或右平移;通过第二电机减速机806的旋转,带动电爪连接板808、电爪809、电爪手指810及所夹持的槟榔进行顺时钟或逆时钟旋转,同时滑台801上的滑板向后移动,在这三个运动的综合作用下,将电爪手指810所夹持的槟榔运送到切刀的刀锋下,达到预设的切缝和刀锋的高度重合,切刀下行,实现切一刀。如果是切两刀,在第一刀切完后,切刀上升,通过前述的运动,将第二刀的切缝调整到和刀锋重合,切刀下行,实现第二刀的切片。
31.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种用于食品智能切片的夹持平移旋转装置,其特征在于:包括滑台(801)、设于滑台上的第一旋转机构和设于第一旋转机构上的第二旋转机构,所述第一旋转机构和第二旋转机构沿所述滑台(801)同时前后运动,所述第一旋转机构沿所述滑台前后运动的轴线左右方向实现第一旋转运动,所述第二旋转机构沿所述第一旋转机构实现第二旋转运动。2.根据权利要求1所述的用于食品智能切片的夹持平移旋转装置,其特征在于:所述第一旋转机构包括设于滑台连接板(802)上的用于安装第一轴承的第一轴承座(803)和用于安装第一电机减速机(804)的电机安装座,所述滑台连接板沿所述滑台进行前后运动,所述第一电机减速机通过第一轴承结合所述第二旋转机构实现左右角度偏移。3.根据权利要求2所述的用于食品智能切片的夹持平移旋转装置,其特征在于:所述滑台连接板(802)为l型连接板,所述l型连接板一端与滑台连接,另一端安装所述电机安装座。4.根据权利要求3所述的用于食品智能切片的夹持平移旋转装置,其特征在于:l型连接板所述一端的左右两侧设有限位机构。5.根据权利要求2所述的用于食品智能切片的夹持平移旋转装置,其特征在于:所述第二旋转机构包括与所述第一轴承上的轴承套径向位置垂直连接的旋转连接板(805),还包括设于旋转连接板上的第二轴承座(807)和第二电机减速机(806),所述第二电机减速机通过第二轴承座上的第二轴承带动旋转执行机构实现待切割食品的顺时针/逆时针旋转。6.根据权利要求5所述的用于食品智能切片的夹持平移旋转装置,其特征在于:所述旋转执行机构包括设于第二轴承的轴承套上的电爪连接板(808)和设于电爪连接板上的电爪(809),所述电爪上设有用于夹抓待切割食品的电爪手指(810)。7.根据权利要求5所述的用于食品智能切片的夹持平移旋转装置,其特征在于:所述第一电机减速机和第二电机减速机的动力输出方向相对设置。
技术总结
本实用新型公开了一种用于食品智能切片的夹持平移旋转装置,包括滑台、设于滑台上的第一旋转机构和设于第一旋转机构上的第二旋转机构,所述第一旋转机构和第二旋转机构沿所述滑台同时前后运动,所述第一旋转机构沿所述滑台前后运动的轴线左右方向实现第一旋转运动,所述第二旋转机构沿所述第一旋转机构实现第二旋转运动。本实用新型能根据食品的大小、形状和方位,能将食品的预设切缝(一条或两条)准确的移位到刀锋下,实现预设切缝和刀锋的高度重合,因此该机构能实现切一刀或切两刀,两种都能保证食品切片的品质,食品的切缝具有确定性。定性。定性。
技术研发人员:李太玉 王贵满 李陈希
受保护的技术使用者:湖南会当智能科技有限公司
技术研发日:2021.09.28
技术公布日:2022/1/21