1.本发明涉及岸电技术领域,具体涉及一种供电机器人。
背景技术:
2.本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
3.船舶使用自备柴油发电机供电,船舶靠港期间如果使用自备柴油发电机供电,会排放大量有害污染物,港区内船舶数量众多,会给港区造成的环境污染。
4.针对上述情况,目前的船舶在靠港时会利用临时电缆实现岸电连接供电,而目前的岸电连接通过人工拖曳电缆作业的方式完成,船舶靠港期间即使大部分的设备已经停机但仍需要大功率的电能,一次岸电接口体积和重量较大,所连接的岸电线缆重量也较大,导致人工拖曳电缆作业的方式需要码头运行人员和解系缆人员相互配合才能完成,岸电对接过程繁琐,作业劳动量大、效率不高,造成大量人力物力的浪费,且作业环境比较恶劣,安全性也较低。
技术实现要素:
5.为了解决上述背景技术中存在的至少一项技术问题,本发明提供一种供电机器人,以自动化的方式提升岸电对接的工作效率和智能化水平。
6.为了实现上述目的,本发明采用如下技术方案:
7.本发明的第一个方面提供一种供电机器人,包括机器人本体,以及位于机器人本体一侧的多轴机械臂和位于机器人本体中部的对接平台;其中:
8.对接平台包括与机器人本体固定连接的底座平台,底座平台顶部设有电力插座和位置调整平台,位置调整平台底部通过纵向导轨与底座平台连接,位置调整平台顶部通过横向导轨与姿态调整平台连接,纵向导轨和横向导轨相互垂直;姿态调整平台顶部通过姿态调整传动装置连接接头夹紧装置,接头夹紧装置靠近电力插座的插孔一侧设置;
9.多轴机械臂末端设有夹爪,夹爪用于夹持船舶线缆接头,夹爪在多轴机械臂的带动下携带船舶线缆接头运动至接头夹紧装置处,利用接头夹紧装置夹紧船舶线缆接头,并通过位置调整平台和姿态调整平台调节船舶线缆接头与电力插座的相对位置以实现船舶线缆接头与电力插座的插孔对接。
10.位置调整平台和电力插座之间设有直线驱动装置。
11.直线驱动装置的运动端与位置调整平台的底板连接,直线驱动装置的固定端与底座平台连接,直线驱动装置带动位置调整平台沿纵向导轨朝向靠近或远离电力插座的方向运动。
12.位置调整平台顶板一侧设有调整平台驱动装置,调整平台驱动装置带动姿态调整平台沿横向导轨运动。
13.位置调整平台内部设有升降驱动装置,升降驱动装置带动位置调整平台沿垂直方
向运动。
14.姿态调整平台顶部设有转轴,转轴一端连接姿态调整传动装置,另一端连接接头夹紧装置,姿态调整传动装置通过转轴带动接头夹紧装置旋转。
15.多轴机械臂末端还设有图像采集装置,图像采集装置用于获取夹爪夹持的船舶线缆接头的位置信息和角度信息。
16.机器人本体末端具有线缆,线缆与对接平台的电力插座连接。
17.机器人本体还具有底盘,对接平台连接在底盘上。
18.机器人本体还设有地撑,地撑展开状态下支撑机器人本体。
19.与现有技术相比,以上一个或多个技术方案存在以下有益效果:
20.1、利用供电机器人的多轴机械臂夹取船舶电缆接头,携带至机器人本体的对接平台中与电力插座连接实现岸电对接,对接平台在接收到船舶电缆接头后利用自身的升降运动、横向移动、纵向移动和接头旋转功能实现与电力插座的对接,利用机器人代替人工拖拽电缆的方式完成岸电对接,降低工作人员的工作量,提升岸电对接的效率。
21.2、对接所需的电力插座集成在机器人本体内部,受到机器人外壳的保护,对接结束后线缆接头和电力插座同样位于机器人本体内部,更好的保护接头组的接触。
22.3、机器人对接平台中的位置调整平台调节线缆接头与电力插座的垂直高度和水平距离,利用姿态调整平台调节线缆接头相对于电力插座的姿态,由机械结构实现的调节过程更加精确。
附图说明
23.构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
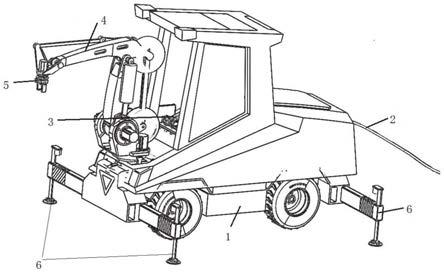
24.图1是本发明一个或多个实施例提供的供电机器人的整体结构示意图;
25.图2是本发明一个或多个实施例提供的供电机器人的对接平台的结构示意图;
26.图3是本发明一个或多个实施例提供的供电机器人的多轴机械臂的结构示意图;
27.图4是本发明一个或多个实施例提供的供电机器人的工作流程示意图;
28.图1中:1、机器人底盘,2、线缆,3、对接平台,4、多轴机械臂,5、夹爪,6、地撑,7、电动门;
29.图2中:31、底座平台,32、电力插座,33、位置调整平台,331、纵向导轨,332、横向导轨,34、直线驱动装置,35、姿态调整平台,351、调整平台驱动装置,36、接头夹紧装置,37、姿态调整传动装置;
30.图3中:41、机械臂底座,411、第一运动轴,42、第一机械臂,421、第二运动轴,43、第二机械臂,431、第三运动轴,44、第三机械臂,441、第四运动轴,45、图像采集装置,451、第五运动轴。
具体实施方式
31.下面结合附图与实施例对本发明作进一步说明。
32.应该指出,以下详细说明都是示例性的,旨在对本发明提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常
理解的相同含义。
33.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
34.如前所描述的,船舶靠港时需要将自身的供电插头接入岸边的插座中,而船舶需要的电能功率较高,使得相匹配的岸电接口(插头和插座)体积、重量较大,相适配的电缆同样重量较大,而岸电对接作业时,船舶电缆与充电桩相距较远,岸电作业时需要人工拖拽电缆,将带有接头的船舶电缆拖拽至充电桩的插座处实现岸电连接,电缆插头对接时需人工配合操作,同时岸电作业环境复杂,工作区域狭小,容易对工作人员造成物理碰撞以及挤压伤害,安全性较低。
35.因此对于目前人工拖曳电缆作业实现岸电对接的过程繁琐、劳动量大和安全性低的问题,以下实施例给出一种供电机器人的硬件结构,利用供电机器人前侧的多轴机械臂夹取船舶电缆接头,携带至机器人本体的对接平台中与电力插座连接实现岸电对接,对接平台的接头夹紧装置在夹紧电缆接头后利用自身的升降运动、横向移动、纵向移动和接头旋转功能,实现船舶电缆接头与电力插座的对接,代替人工作业实现岸电对接作业,以自动化的方式提升岸电对接的工作效率和智能化水平。
36.实施例一:
37.如图1-3所示,本实施例的目的是提供一种供电机器人,包括位于机器人本体一侧的多轴机械臂4和位于机器人本体中部的对接平台3,对接平台3朝向多轴机械臂4的一侧设有电动门7;多轴机械臂4末端具有用于夹取船舶线缆接头的夹爪5,夹爪5用于夹取船舶线缆接头。电动门7开启,多轴机械臂4携带船舶线缆接头运动至对接平台3的接头夹紧装置36处,利用接头夹紧装置36夹紧船舶线缆接头,通过对接平台3的位置调整平台33和姿态调整平台35实现与电力插座32的对接;对接完成后,电动门7自动下放(本实施例中,电动门7位于机器人本体前部),将接头夹紧装置36及船舶线缆接头、电力插座32屏蔽在机器人本体内部,如此,利用机器人代替人工拖拽电缆的方式完成岸电对接,降低工作人员的工作量,提升岸电对接的效率。
38.多轴机械臂4具有最大作业距离,对接平台3处于多轴机械臂4的最大作业范围内。
39.对接平台3包括与机器人本体固定连接的底座平台31,底座平台31顶部设有与线缆2连接的电力插座32和位置调整平台33,位置调整平台33底部通过纵向导轨331与底座平台31连接,位置调整平台33顶部通过横向导轨332与姿态调整平台35连接,纵向导轨331和横向导轨332相互垂直;姿态调整平台35顶部通过姿态调整传动装置37连接接头夹紧装置36,接头夹紧装置36朝向靠近电力插座32的一侧。
40.位置调整平台33和电力插座32之间设有直线驱动装置34,直线驱动装置34的运动端与位置调整平台33的底板连接,直线驱动装置34的固定端与底座平台31连接,直线驱动装置34带动位置调整平台33沿纵向导轨331朝向靠近或远离电力插座32的方向运动;
41.位置调整平台33顶板一侧设有调整平台驱动装置351,调整平台驱动装置351带动姿态调整平台35沿横向导轨332运动;
42.位置调整平台33内部设有升降驱动装置,升降驱动装置带动位置调整平台33沿垂
直方向升降运动;
43.姿态调整平台35顶部设有转轴,转轴一端连接姿态调整传动装置37,另一端连接接头夹紧装置36,姿态调整传动装置37通过转轴带动接头夹紧装置36旋转。
44.多轴机械臂4末端的夹爪5夹取船舶线缆接头,运动至接头夹紧装置36处,利用接头夹紧装置36夹紧线缆接头,利用被调整平台驱动装置351带动的姿态调整平台35调节线缆接头与电力插座32之间的横向距离(以图2中的视角,左右方向为横向,即横向导轨332的方向),利用被姿态调整传动装置37带动的接头夹紧装置36调节线缆接头与电力插座32的适配角度,确保线缆接头上的每个插针与电力插座32上的每个插孔位置对应,利用被直线驱动装置34带动的位置调整平台33改变线缆接头与电力插座32之间的纵向距离(以图2中的视角,前后方向为纵向,即纵向导轨331的方向),实现线缆接头插入电力插座32内,从而完成岸电对接。
45.本实施例中,直线驱动装置34可以为能够提供往复直线运动动力的任意已有装置,例如气缸、直线电机等任意结构的部件。
46.本实施例中,调整平台驱动装置351可以为通过手轮、旋转电机或步进电机带动姿态调整平台35底部丝杠,实现姿态调整平台35往复直线运动的任意装置。
47.本实施例中,姿态调整平台35具有板状的平台本体,平台本体顶部设有同轴的至少两组轴承座,转轴连接在两组轴承座上,转轴一端连接姿态调整传动装置37,另一端连接接头夹紧装置36。
48.本实施例中,姿态调整传动装置37可为连接在转轴上的传动轮,和与传动轮连接的电机,电机带动传动轮旋转,传动轮通过转轴将旋转扭矩传递给转轴另一端的接头夹紧装置36,实现接头夹紧装置36的旋转运动,从而调整接头夹紧装置36夹取的线缆接头姿态(这里的姿态指线缆接头的插针与电力插座32插孔的相对位置)。其中,电机和传动轮不限制具体的结构形式,可以为链条传动、齿轮传动或带传动中的任意一种或多种。
49.本实施例中,位置调整平台33具有连接在顶板和底板之间的调整平台本体,调整平台本体可以为剪叉式升降平台,能够带动顶部的姿态调整平台35和接头夹紧装置36实现升降运动,从调整线缆接头在垂直方向的位置,实现线缆接头与电力插座32在垂直方向的位置调节。
50.本实施例中,接头夹紧装置36具有开口相向布置的两个半圆的夹紧板,两夹紧板固定在接头夹紧装置36的本体上,通过两夹紧板的相互靠近实现线缆接头的夹紧,通过两夹紧板的相互远离实现线缆接头的松开。
51.多轴机械臂4具有至少一组机械臂和运动轴,取决于实际需求,具体的轴数和机械臂长度不做限制,可以选用任意已有结构的机械臂部件。
52.本实施例中,多轴机械臂4包括机械臂底座41,机械臂底座41通过第二运动轴421连接第一机械臂42,第一机械臂42通过第三运动轴431连接第二机械臂43,第二机械臂43通过第四运动轴441连接第三机械臂44,第三机械臂44通过第五运动轴451连接夹爪5,夹爪5和第五运动轴451之间设有图像采集装置45。
53.本实施例中,机械臂底座41具有垂直布置的第一运动轴411和水平布置的第二运动轴421,第一机械臂42绕水平布置的第二运动轴421运动,第一运动轴411连接电机,使机械臂底座41通过电机带动第一机械臂沿垂直方向的轴旋转,从而改变末端的夹爪5在水平
面的位置,实现夹取线缆转移至接头夹紧装置36处。
54.图像采集装置45可以为视觉相机、摄像头或是任意已有结构的部件,用于识别线缆接头位置及角度信息,该信息用于对接平台3调整姿态完成接头与电力插座32的对接。
55.机器人本体还具有底盘,对接平台3安装在机器人底盘1上。
56.本实施例中,机器人底盘1采用四轮独立悬架,后轮驱动前轮转向结构,可自主或遥控导航行走,搭载动力电池、电控柜,集成超声波雷达、防碰撞开关条等多级防护;底盘结构紧凑可在狭小的工作区域穿梭行驶。
57.机器人本体的末端具有线缆2,线缆2一端与对接平台3的电力插座32连接,线缆2另一端连接供电设施,供电设施可以为变压器、公用电网、专用电网或是已有技术中的任意一种或多种变配电设施,当船舶线缆的接头与电力插座32对接之后,实现岸电连接。
58.机器人本体还设有地撑6,用于在作业时稳固机器人底盘1及机器人本体使用,行进时收起,作业时放下并支撑机器人本体。
59.供电机器人的对接平台通过电动门保护,避免在岸边受到海浪、水汽影响,提高安全性;还设有激光雷达,可自主运行至船舶电缆处并将作业机器人抓取的电缆插头与自动对接平台对接,从而实现船舶岸电取电的智能控制和管理。
60.激光雷达通过获取机器人本体与周围障碍物之间的距离信息,当距离信息小于设定值时,发出信号使机器人本体停止运动或转向,实现供电机器人的自动/遥控避障,确保供电机器人的安全性。
61.机械臂末端的图像采集装置获取固定在接头夹紧装置上的接头形状,通用型岸电接头为不规则形状,利用图像识别算法通过接头外观匹配识别其插孔或插针的角度信息以及夹持位置信息,基于角度信息和夹持位置信息,利用被调整平台驱动装置351带动的姿态调整平台35调节线缆接头与电力插座32之间的横向距离(以图2中的视角,左右方向为横向,即横向导轨332的方向),利用被姿态调整传动装置37带动的接头夹紧装置36调节线缆接头与电力插座32的适配角度,确保线缆接头上的每个插针与电力插座32上的每个插孔位置对应,利用被直线驱动装置34带动的位置调整平台33改变线缆接头与电力插座32之间的纵向距离(以图2中的视角,前后方向为纵向,即纵向导轨331的方向),实现线缆接头插入电力插座32内,从而完成岸电对接。
62.如图4所示,上述供电机器人的作业过程如下:
63.船舶靠港完成后,船舶电缆下放,供电机器人接收船舶到港信息以遥控或导航的方式进入岸电最接作业区域,机器人本体依据指令停在作业区域的指定位置,地撑展开固定机器人本体;
64.多轴机械臂运动夹取船舶电缆接头,并在携带电缆接头的状态下运动至接头夹紧装置36所在的位置(例如,机械臂调整姿态后,第一运动轴411旋转某一角度到达接头夹紧装置36所在处),接头夹紧装置36夹持船舶线缆接头,机械臂末端的夹爪5松开线缆接头,机械臂末端的图像采集装置45通过采集接头外观形状信息,根据预设接头外观信息进行匹配计算,获取线缆接头的位置和角度信息,利用该信息,姿态调整平台35调节船舶电缆接头与电力插座32之间的横向距离,接头夹紧装置36调节船舶电缆接头与电力插座32的适配角度,位置调整平台33改变船舶电缆接头与电力插座32之间的纵向距离,实现船舶电缆接头插入电力插座32内,完成岸电对接,供电开启;
65.供电完毕,位置调整平台33运动分离船舶电缆接头与电力插座32,接头夹紧装置36松开,机械臂夹取接头放置在地面或依据作业需求放置在设定位置;
66.地撑6回收,机器人本体离开作业区域,船舶电缆回收,作业完成。
67.上述机器人代替人工拖拽电缆的方式完成岸电对接,大幅降低工作人员的工作量,提升岸电对接的效率。
68.机器人代替人工进行岸电接头对接,避免人工接触可能会通过高电压大电流的线缆及接头,提升岸电对接的作业安全性。
69.对接所需的电力插座32集成在机器人本体内部,受到机器人外壳的保护,对接结束后线缆接头和电力插座32同样位于机器人本体内部,更好的保护接头组的接触。
70.机器人对接平台中的位置调整平台调节线缆接头与电力插座32的垂直高度和水平距离,利用姿态调整平台调节线缆接头相对于电力插座32的姿态,由机械结构实现的调节过程更加精确。
71.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。