1.本实用新型涉及机器人设备技术领域,具体涉及一种智能机器人双目视觉控制装置。
背景技术:
2.机器人的控制装置是智能机器人的核心零部件之一,也是容易出现问题及需要更换检查零部件的部位,目前现有的一些控制装置内部采用风扇散热,噪音相对较大,容易沉积灰尘,另一方面,现有的控制装置壳体拆卸不便,底板上壳体的连接螺钉位于底板下方,尤其是检测壳体内部时,需要分别将侧板和壳体拆下,拆卸下的螺钉较多,比较麻烦。
技术实现要素:
3.有鉴于此,本实用新型提供一种智能机器人双目视觉控制装置,不仅散热好、噪音小,而且安装拆卸方便。
4.为解决上述技术问题,本实用新型提供一种智能机器人双目视觉控制装置,包括壳体,所述壳体内部固定安装有控制模块、存储模块、i/o接口、数据传输模块和蓄电池,所述壳体一体成型有散热鳍片,所述壳体下方设有底板,所述底板上表面四角与壳体对应位置固定安装有定位板,所述壳体前后两侧均一体成型有限位挡板,所述限位挡板外侧设有侧板,所述限位挡板与侧板对应位置开设有配合槽,所述侧板和壳体通过螺钉与定位板固定连接。
5.进一步的,所述底板左右两侧均开设有定位孔。
6.进一步的,所述底板底部四角均固定安装有支撑块。
7.进一步的,所述支撑块的高度为2-5mm。
8.进一步的,所述壳体长、宽、高分别为235mm、153mm和54mm。
9.本实用新型的上述技术方案的有益效果如下:
10.1、壳体上一体成型有散热鳍片,增大与空气的接触面积,被动式散热,提高了控制装置的散热效果,降低了噪音,且有效的避免了灰尘进入壳体;
11.2、通过改进原有的壳体连接结构,不仅稳定性更好,且拆卸方便,提高了便利性。
附图说明
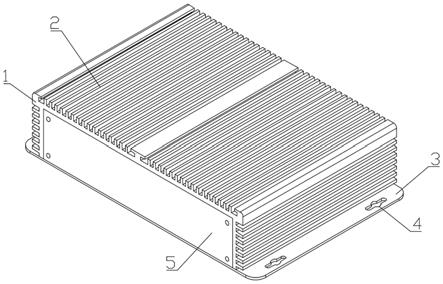
12.图1为本实用新型智能机器人双目视觉控制装置的立体示意图;
13.图2为本实用新型智能机器人双目视觉控制装置的主视图;
14.图3为本实用新型智能机器人双目视觉控制装置的底板的立体示意图;
15.图4为本实用新型智能机器人双目视觉控制装置的俯视结构示意图。
16.1、壳体;2、散热鳍片;3、底板;4、定位孔;5、侧板;6、支撑块;7、定位板;8、限位挡板。
具体实施方式
17.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例的附图1-4,对本实用新型实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于所描述的本实用新型的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
18.如图1-4所示:一种智能机器人双目视觉控制装置,包括壳体1,壳体1内部固定安装有控制模块、存储模块、i/o接口、数据传输模块和蓄电池,控制模块,集成intel i7-8550u 1.8g 主频最大睿频频率4g;存储模块,板载4g内存和双ddr4插槽,最大支持32g;i/o接口,4xusb3.0接口,3xusb2.0接口,1xhdmi,1xlan,1xvga;数据传输模块,2*wifi +超强型300m无线;蓄电池,单电源dc +12v;以上均为现有技术,且未作出改进,在此不作详细描述,壳体1一体成型有散热鳍片2,壳体1下方设有底板3,底板3上表面四角与壳体1对应位置固定安装有定位板7,壳体1前后两侧均一体成型有限位挡板8,限位挡板8外侧设有侧板5,侧板5上开设有与各接口对应的通孔,限位挡板8与侧板5对应位置开设有配合槽,侧板5和壳体1通过螺钉与定位板7固定连接,侧板5上端的螺钉与壳体1连接。
19.底板3左右两侧均开设有定位孔4,用于固定本实用新型。
20.根据本实用新型的一个实施例,如图2所示,底板3底部四角均固定安装有支撑块6,支撑块6的高度为3mm,底板3与智能机器人的安装座留有一定的间隙,增大底板3与空气的接触面积。
21.壳体1长、宽、高分别为235mm、153mm和54mm,该尺寸为优选的一个尺寸,在其他实施例中,也可以根据实际情况适当调整。
22.本实用新型的工作方法(或工作原理):
23.使用时,散热鳍片2通过增大与空气的接触面积,加速散热,保证内部设备正常运行,在拆卸检修接口时,仅需拆卸侧板5即可,在检修壳体1内部时,将侧板5前后两侧的螺钉取下后即可完全将壳体1及侧板5取下,便于检修底板3上的各个零部件。
24.在本实用新型中,除非另有明确的规定和限定,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
25.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种智能机器人双目视觉控制装置,包括壳体(1),所述壳体(1)内部固定安装有控制模块、存储模块、i/o接口、数据传输模块和蓄电池,其特征在于:所述壳体(1)一体成型有散热鳍片(2),所述壳体(1)下方设有底板(3),所述底板(3)上表面四角与壳体(1)对应位置固定安装有定位板(7),所述壳体(1)前后两侧均一体成型有限位挡板(8),所述限位挡板(8)外侧设有侧板(5),所述限位挡板(8)与侧板(5)对应位置开设有配合槽,所述侧板(5)和壳体(1)通过螺钉与定位板(7)固定连接。2.如权利要求1所述的智能机器人双目视觉控制装置,其特征在于:所述底板(3)左右两侧均开设有定位孔(4)。3.如权利要求1所述的智能机器人双目视觉控制装置,其特征在于:所述底板(3)底部四角均固定安装有支撑块(6)。4.如权利要求3所述的智能机器人双目视觉控制装置,其特征在于:所述支撑块(6)的高度为2-5mm。5.如权利要求1所述的智能机器人双目视觉控制装置,其特征在于:所述壳体(1)长、宽、高分别为235mm、153mm和54mm。
技术总结
本实用新型提供一种智能机器人双目视觉控制装置,属于机器人技术领域,包括壳体,所述壳体内部固定安装有控制模块、存储模块、I/O接口、数据传输模块和蓄电池,所述壳体一体成型有散热鳍片,所述壳体下方设有底板,所述底板上表面四角与壳体对应位置固定安装有定位板;本实用新型壳体上一体成型有散热鳍片,增大与空气的接触面积,被动式散热,提高了控制装置的散热效果,降低了噪音,且有效的避免了灰尘进入壳体;通过改进原有的壳体连接结构,不仅稳定性更好,且拆卸方便,提高了便利性。提高了便利性。提高了便利性。
技术研发人员:孟凡博 李冰 胡英才 冯兴
受保护的技术使用者:河南固睿智能科技有限公司
技术研发日:2021.05.31
技术公布日:2022/1/21