1.本实用新型涉及机械纺织设备领域,特别涉及全自动智能存轴取轴架。
背景技术:
2.现有的布轴都是在布卷打完布后,员工手动搬运到指定的地方堆放起来,且在使用的时候员工再从堆放的地方搬运到机器上,这样的工作方式既浪费人工,效率又低,同时由于纺织厂的工作环境恶劣,员工长时间在恶劣环境中工作会增加员工的负担,从而导致了员工的离职率高,进而影响公司的稳定运行。
技术实现要素:
3.本实用新型解决的技术问题是提供一种可以自动存轴、自动取轴,节省人力,提高工作效率的全自动智能存轴取轴架。
4.本实用新型解决其技术问题所采用的技术方案是:全自动智能存轴取轴架,包括固定架,所述固定架的上端设置有用于带动轴传动的链条组件,所述链条组件对称设置有两组,所述固定架上位于其中一组链条组件的一侧设置有用于带动链条组件传动的动力组件,所述链条组件上固定设置有多个轴卡槽,各组所述链条组件的外侧设置有导向架,所述导向架固定设置在固定架上,还包括用于控制全自动智能存轴取轴架的控制组件,所述动力组件与控制组件电气连接,所述轴为产品。
5.进一步的是:所述固定架的上端倾斜设置,所述链条组件倾斜设置。
6.进一步的是:所述链条组件包括链条,所述链条两端的内表面啮合连接有链轮,各个所述链轮的内表面设置有传动轴,所述传动轴通过轴承连接在固定架上。
7.进一步的是:所述动力组件包括设置在其中一个传动轴一端上的第一同步轮,所述第一同步轮的外表面设置有同步带,所述同步带远离第一同步轮一端的内表面设置有第二同步轮,所述第二同步轮通过减速机与电机连接,所述电机与控制组件电气连接。
8.进一步的是:所述链条下端的上侧设置有上轴端,所述链条下端的下侧设置有下轴端。
9.进一步的是:所述固定架上位于链条组件的上轴端处设置有用于检测是否有轴经过的第一传感器,所述链条组件的下轴端处设置有用于检测链条的末端是否有轴的第二传感器,所述固定架上位于第一传感器和第二传感器之间设置有用于检测轴卡槽转动角度是否正确的第三传感器,所述第一传感器、第二传感器和第三传感器分别与控制组件电气连接。
10.进一步的是:所述控制组件包括电控箱和设置在固定架上的操作面板。
11.进一步的是:所述固定架上位于链条的一端设置有用于调节链条松紧度的链条松紧调节组件,所述链条松紧调节组件对称设置有两组。
12.进一步的是:所述固定架上位于下轴端处设置有缓冲片,所述缓冲片对称设置有两个。
13.进一步的是:所述固定架上位于链条组件的外侧设置有防护罩。
14.本实用新型的有益效果是:本实用新型能够自动将轴存放到轴架上,在需要轴时能够自动将轴取下,节省了轴堆放的空间,节省了劳动强度,提高了工作效率。
附图说明
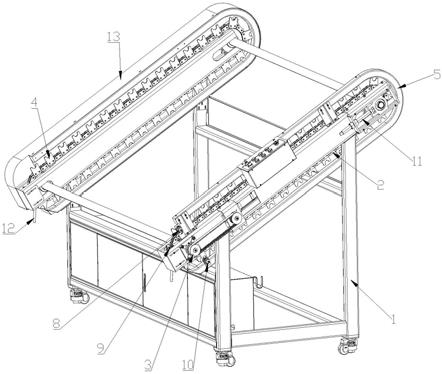
15.图1为全自动智能存轴取轴架的整体结构示意图;
16.图2为链条组件和动力组件的结构示意图;
17.图中标记为:1、固定架;2、链条组件;3、动力组件;4、轴卡槽;5、导向架;8、第一传感器;9、第二传感器;10、第三传感器;11、链条松紧调节组件;12、缓冲片;13、防护罩;21、链条;22、链轮;23、传动轴;31、第一同步轮;32、同步带;33、第二同步轮;34、电机。
具体实施方式
18.下面结合附图和具体实施方式对本实用新型进一步说明。
19.如图1所示,本技术的实施例提供了一种全自动智能存轴取轴架,该全自动智能存轴取轴架包括包括固定架1,所述固定架1的上端设置有用于带动轴传动的链条组件2,所述链条组件2对称设置有两组,所述固定架1上位于其中一组链条组件2的一侧设置有用于带动链条组件2传动的动力组件3,所述链条组件2上固定设置有多个轴卡槽4,各组所述链条组件2的外侧设置有导向架5,所述导向架5固定设置在固定架1上,还包括用于控制全自动智能存轴取轴架的控制组件,所述动力组件3与控制组件电气连接,所述轴为产品。
20.所述链条组件2用于带动轴传动,所述链条组件2对称设置有两组,使得轴传动的更平稳,所述动力组件3用于带动链条组件2传动,从而带动轴进行传动,从而进行存轴或取轴,所述轴卡槽4用于将轴卡住,防止在传动的过程中轴滚动,所述导向架5用于辅助轴传动,给轴导向,防止轴在传动到链条21的下端时掉落,所述控制组件用于控制全自动智能存轴取轴架。
21.在上述基础上,所述固定架1的上端倾斜设置,所述链条组件2倾斜设置,一方面便于存轴、取轴,另一方面节省空间。
22.在上述基础上,如图2所示,所述链条组件2包括链条21,所述链条21两端的内表面啮合连接有链轮22,各个所述链轮22的内表面设置有传动轴23,所述传动轴23通过轴承连接在固定架1上。
23.在上述基础上,所述动力组件3包括设置在其中一个传动轴23一端上的第一同步轮31,所述第一同步轮31的外表面设置有同步带32,所述同步带32远离第一同步轮31一端的内表面设置有第二同步轮33,所述第二同步轮33通过减速机与电机34连接,所述电机34与控制组件电气连接。
24.所述电机34转动带动第二同步轮33转动,所述第二同步轮33转动带动同步带32传动,从而带动第一同步轮31转动,所述第一同步轮31转动带动传动轴23转动,从而带动链轮22转动,从而带动链条21传动,进而带动轴传动,进行存轴或取轴。
25.在上述基础上,所述链条21下端的上侧设置有上轴端,所述链条21下端的下侧设置有下轴端。
26.在存轴时,其他轴上料设备从上轴端将轴放置到轴卡槽4内,所述链条组件2带动
轴传动进行存轴。
27.在取轴时,机器人小车与电控箱进行信号传输,所述链条组件2带动轴进行传动,轴从下轴端掉落。
28.在上述基础上,所述固定架1上位于链条组件2的上轴端处设置有用于检测是否有轴经过的第一传感器8,所述链条组件2的下轴端处设置有用于检测链条21的末端是否有轴的第二传感器9,所述固定架1上位于第一传感器8和第二传感器9之间设置有用于检测轴卡槽4转动角度是否正确的第三传感器10,所述第一传感器8、第二传感器9和第三传感器10分别与控制组件电气连接。
29.所述第一传感器8用于检测是否有轴经过,当第一传感器8检测到指定位置处有轴经过时,发出信号给控制组件,所述控制组件控制动力组件3带动链条组件2进行传动,从而带动轴向前传动。
30.所述第二传感器9用于检测链条21的末端是否有轴,当第二传感器9检测到下轴端处有轴时,发出信号给控制组件,说明本存轴取轴架上已经装满轴了,所述控制组件控制动力组件3停止工作。
31.所述第三传感器10用于检测轴卡槽4转动角度是否正确,消除角度误差。
32.所述第一传感器8、第二传感器9和第三传感器10可以光电传感器或超声波传感器,本实施案例中所述第一传感器8、第二传感器9和第三传感器10均为光电传感器。
33.在上述基础上,所述控制组件包括电控箱和设置在固定架1上的操作面板,所述操作面板上设置有启动按钮、停止按钮、急停按钮、手动自动切换按钮。
34.在上述基础上,所述固定架1上位于链条21的一端设置有用于调节链条21松紧度的链条松紧调节组件11,所述链条松紧调节组件11对称设置有两组。
35.所述链条松紧调节组件11用于调节链条21的松紧度。
36.在上述基础上,所述固定架1上位于下轴端处设置有缓冲片12,所述缓冲片12对称设置有两个。
37.所述缓冲片12用于缓冲被取的轴,防止被取的轴直接掉落。
38.在上述基础上,所述固定架1上位于链条组件2的外侧设置有防护罩13。
39.所述防护罩13的作用为防护,防止人员或物品等触碰到链条组件2,造成危险。
40.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。