1.本发明涉及食材处理器械领域,尤其是一种智能全自动切菜机。
背景技术:
2.蔬菜是人们日常饮食中必不可少的食物之一,可提供人体所必需的多种维生素和矿物质等,并且烹饪方法多种多样。现在人们对健康饮食的需求使得对食用方便、营养丰富、经过加工的精细蔬菜的需求越来越大。虽然烹饪的后序步骤已经有料理机可以解决,但是前序的食材处理对于年轻人来说仍然是一个难题,日常生活中通过手工快速切菜严重威胁着人身安全,经过调查发现:日常普通家庭主厨手工处理食材存在切的慢、菜型不整齐,易伤手等问题,尤其是胡萝卜、土豆等根茎类、块类蔬菜的加工难度更大。
技术实现要素:
3.为了克服现有技术存在的缺陷,本发明提供了一种安全高效、操作方便的智能全自动切菜机。
4.本发明解决其技术问题所采用的技术方案是:
5.一种智能全自动切菜机,包括主支撑架以及安装在主支撑架上的食材进给装置、用于测量食材到达指定位置的光电传感器、切片装置、切丝切丁装置、操控面板和控制器,所述光电传感器和操控面板均与控制器连接,所述控制器分别与食材进给装置、切片装置和切丝切丁装置连接;
6.所述主支撑架包括上层板、中层板和下层板,所述中层板上设有第一下料口,所述下层板的右部设有第二下料口,所述食材进给装置包括进料口和同步带夹爪机构,所述进料口安装在上层板上,所述第一下料口与进料口上下正对,所述同步带夹爪机构位于第一下料口的上方并且安装在上层板上,所述光电传感器安装在进料口的下端,所述切片装置靠近第一下料口并且安装在中层板上;
7.所述切丝切丁装置包括切丝切丁机构、用于接收切片的平台、输送机构和用于将食材从平台上掉落的挡板,所述平台可转动地安装在平台底座上,并且其与旋转舵机连接,所述平台底座安装在输送机构上,所述切丝切丁机构位于输送机构的上方并且安装在中层板上,所述挡板位于第二下料口的上方并且安装在中层板上;
8.通过操控面板选择模式,若选择切片模式,食材从进料口送入,通过同步带夹爪机构夹持并且进行向下进给,接着通过切片装置将食材切成片后,从第一下料口掉落到平台上,由输送机构输送到第二下料口的上方,通过挡板将食材从第二下料口落入盘中;若选择切丝模式,在切片完毕后,输送机构会将平台输送到切丝切丁机构的下方,进行切丝;若选择切块模式,在切丝完毕后,输送机构带动平台后退并且通过旋转舵机将平台旋转90
°
,通过切丝切丁机构进行切丁,最后都是通过挡板将食材从第二下料口落入盘中。
9.进一步,所述同步带夹爪机构包括三个进给夹爪单元,三个进给夹爪单元均布在进料口一周,每个进给夹爪单元均包括进给电机、进给传动机构、同步带传动机构、夹持舵
机和两组连杆机构,所述进给电机通过电机支架安装在两块上侧板之间,两块上侧板分别通过连接件与主支撑架的上层板连接,所述进给传动机构包括圆锥齿轮a、圆锥齿轮b、直齿轮a、直齿轮b和直齿轮c,所述圆锥齿轮a安装在进给电机的输出轴上,所述圆锥齿轮b与直齿轮a通过第一转轴同轴连接,第一转轴的左右两端安装在两块上侧板上,所述直齿轮b安装在第二转轴上,第二转轴的左右两端分别安装在位于内侧的一组连杆机构的两根连杆的中部,该组的两根连杆的上端分别与第一转轴的两端可转动地连接,所述圆锥齿轮a与圆锥齿轮b啮合,所述直齿轮a与直齿轮b啮合,所述同步带传动机构包括同步带、同步带轮a、同步带轮b和同步带轮c,所述同步带轮a、同步带轮b和同步带轮c形成三角形并且通过同步带连接,所述同步带轮a与直齿轮c通过第三转轴同轴连接,第三转轴的两端安装在两块下侧板的上端,两块下侧板左右对称设置,内侧的一组连杆机构的两根连杆的下端分别与第三转轴的两端可转动地连接,所述同步带轮b安装在第四转轴上,第四转轴位于第三转轴的内侧,并且的两端分别安装在两块下侧板的上端,所述同步带轮c安装在第五转轴上,第五转轴的两端分别安装在两块下侧板的下端;位于外侧的一组连杆机构的两根连杆的上端分别与两块上侧板铰接,该组连杆机构的两根连杆的下端分别与两块下侧板的上端铰接,同时,该组连杆机构的一根连杆的上端与所述夹持舵机的舵盘连接,所述夹持舵机通过舵机支架安装在电机支架上;
10.食材通过进料口进入后,通过夹持舵机驱动两组连杆机构实现夹持,通过进给电机驱动,同步带传动机构进行传动,带动同步带传动机构运动,从而带动食材向下进给。
11.再进一步,所述切片装置包括挡罩、切割刀片、刀片联轴器、切片直流电机和下环罩,所述挡罩设置在第一下料口一周,并且通过螺栓固定在主支撑架的中层板顶面上,所述切片直流电机安装在中层板上,所述刀片联轴器通过顶丝与切片直流电机的输出端相配合,所述切割刀片通过螺栓固定在刀片联轴器上,所述下环罩位于第一下料口处,并且通过螺栓固定在中层板的底面上;切割刀片通过切片直流电机的驱动周转对食材进行切片,切片依次从第一下料口、下环罩落下。
12.更进一步,所述切丝切丁机构包括平底电推杆、夹刀架和切丝切丁刀片,所述切丝切丁刀片通过夹刀架安装在平底电推杆上,平底电推杆安装在主支撑架的中层板上,所述切丝切丁刀片位于挡板的左侧;
13.所述输送机构包括步进电机、左同步带轮、右同步带轮、步进电机支架和同步带,所述步进电机通过步进电机支架安装在下层板上,左同步带轮与右同步带轮通过同步带连接,所述左同步带轮安装在步进电机的输出端上,右同步带轮通过同步带轮支架安装在下层板上,所述平台底座通过厢式滑块安装在光轴上,光轴通过光轴支架安装在下层板上,同时,平台底座通过同步带压板与同步带连接;通过步进电机带动同步带运动,从而带动平台实现左右移动。
14.本发明的有益效果主要表现在:本发明在满足现有相关领域食材处理机的基础上,具有安全高效、操作方便的优势;本机器区别于市面上的切菜方式,采用同步带夹爪机构代替传统的人工下压切菜机和大型输送带式的卧式切菜机,减轻用户的劳动强度同时维持了机器的小型化,能更好的适应如今较小的厨房;平台与两个刀片构成一套系统,可实现切丝切片的功能,多种功能集成于一体,便捷高效;模块化的设计便于拆装,进料口、刀片和平台方便拆卸清洗;且此机器基于通用设计理念和人机交互技术,充分考虑了用户体验和
使用需求,能为用户提供了更为智能化自动化的服务。
附图说明
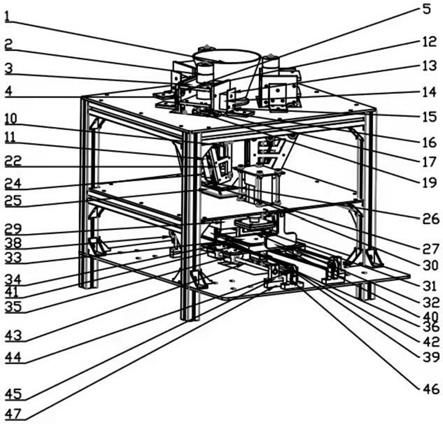
15.图1是本发明的结构示意图。
16.图2是食材进给装置的结构示意图。
17.图3是进给夹爪单元的结构示意图。
18.图4是切片装置的结构示意图。
19.图5是切丝切丁装置的结构示意图。
具体实施方式
20.下面结合附图对本发明作进一步描述。
21.参照图1~图5,一种智能全自动切菜机,包括主支撑架以及安装在主支撑架上的食材进给装置、用于测量食材到达指定位置的光电传感器、切片装置、切丝切丁装置、操控面板和控制器,所述光电传感器和操控面板均与控制器连接,所述控制器分别与食材进给装置、切片装置和切丝切丁装置连接;
22.所述主支撑架包括上层板、中层板和下层板,所述中层板上设有第一下料口,所述下层板的右部设有第二下料口,所述食材进给装置包括进料口1和同步带夹爪机构,所述进料口1安装在上层板上,所述第一下料口与进料口1上下正对,所述同步带夹爪机构位于第一下料口的上方并且安装在上层板上,所述光电传感器安装在进料口1的下端,所述切片装置靠近第一下料口并且安装在中层板上;
23.所述切丝切丁装置包括切丝切丁机构、用于接收切片的平台33、输送机构和用于将食材从平台33上掉落的挡板40,所述平台可转动地安装在平台底座34上,并且其与旋转舵机42连接,所述平台底座34安装在输送机构上,所述切丝切丁机构位于输送机构的上方并且安装在中层板上,所述挡板40位于第二下料口的上方并且安装在中层板上;
24.通过操控面板选择模式,若选择切片模式,食材从进料口1送入,通过同步带夹爪机构夹持并且进行向下进给,接着通过切片装置将食材切成片后,从第一下料口掉落到平台33上,由输送机构输送到第二下料口的上方,通过挡板40将食材从第二下料口落入盘中;若选择切丝模式,在切片完毕后,输送机构会将平台输送到切丝切丁机构的下方,进行切丝;若选择切块模式,在切丝完毕后,输送机构带动平台33后退并且通过旋转舵机将平台33旋转90
°
,通过切丝切丁机构进行切丁,最后都是通过挡板40将食材从第二下料口落入盘中。
25.进一步,所述同步带夹爪机构包括三个进给夹爪单元,三个进给夹爪单元均布在进料口1一周,每个进给夹爪单元均包括进给电机、进给传动机构、同步带传动机构、夹持舵机和两组连杆机构,所述进给电机通过电机支架安装在两块上侧板4之间,两块上侧板4分别通过连接件与主支撑架的上层板连接,所述进给传动机构包括圆锥齿轮a6、圆锥齿轮b7、直齿轮a20、直齿轮b8和直齿轮c21,所述圆锥齿轮a6安装在进给电机的输出轴上,所述圆锥齿轮b7与直齿轮a20通过第一转轴同轴连接,第一转轴的左右两端安装在两块上侧板4上,所述直齿轮b8安装在第二转轴上,第二转轴的左右两端分别安装在位于内侧的一组连杆机构的两根连杆的中部,该组的两根连杆的上端分别与第一转轴的两端可转动地连接,所述
圆锥齿轮a6与圆锥齿轮b7啮合,所述直齿轮a20与直齿轮b8啮合,所述同步带传动机构包括同步带11、同步带轮a9、同步带轮b23和同步带轮c24,所述同步带轮a9、同步带轮b23和同步带轮c24形成三角形并且通过同步带11连接,所述同步带轮a9与直齿轮c21通过第三转轴同轴连接,第三转轴的两端安装在两块下侧板22的上端,两块下侧板22左右对称设置,内侧的一组连杆机构的两根连杆的下端分别与第三转轴的两端可转动地连接,所述同步带轮b23安装在第四转轴上,第四转轴位于第三转轴的内侧,并且的两端分别安装在两块下侧板22的上端,所述同步带轮c24安装在第五转轴上,第五转轴的两端分别安装在两块下侧板22的下端;位于外侧的一组连杆机构的两根连杆的上端分别与两块上侧板4铰接,该组连杆机构的两根连杆的下端分别与两块下侧板22的上端铰接,同时,该组连杆机构的一根连杆的上端与所述夹持舵机19的舵盘18连接,所述夹持舵机19通过舵机支架17安装在电机支架上;
26.食材通过进料口1进入后,通过夹持舵机19驱动两组连杆机构实现夹持,通过进给电机驱动,同步带传动机构进行传动,带动同步带传动机构运动,从而带动食材向下进给。
27.再进一步,所述切片装置包括挡罩25、切割刀片26、刀片联轴器27、切片直流电机28和下环罩29,所述挡罩25设置在第一下料口一周,并且通过螺栓固定在主支撑架的中层板顶面上,所述切片直流电机28安装在中层板上,所述刀片联轴器27通过顶丝与切片直流电机28的输出端相配合,所述切割刀片26通过螺栓固定在刀片联轴器27上,所述下环罩29位于第一下料口处,并且通过螺栓固定在中层板的底面上;切割刀片26通过切片直流电机28的驱动周转对食材进行切片,切片依次从第一下料口、下环罩29落下。
28.更进一步,所述切丝切丁机构包括平底电推杆30、夹刀架31和切丝切丁刀片32,所述切丝切丁刀片32通过夹刀架31安装在平底电推杆30上,平底电推杆30安装在主支撑架的中层板上,所述切丝切丁刀片32位于挡板40的左侧;
29.所述输送机构包括步进电机36、左同步带轮38、右同步带轮44、步进电机支架37和同步带39,所述步进电机36通过步进电机支架37安装在下层板上,左同步带轮38与右同步带轮44通过同步带39连接,所述左同步带轮38安装在步进电机36的输出端上,右同步带轮44通过同步带轮支架46安装在下层板上,所述平台底座34通过厢式滑块35安装在光轴43上,光轴43通过光轴支架45安装在下层板上,同时,平台底座34通过同步带压板41与同步带39连接;通过步进电机36带动同步带39运动,从而带动平台33实现左右移动。
30.如图1所示,所述主支撑架的上层板、中层板和下层板之间通过角码和铝型材连接,上层板、中层板和下层板均为铝板。
31.如图2和图3所示,所述进料口1通过螺栓安装在主支撑架上,进给电机为直流电机2,电机支架包括电机上支架3和电机下支架5,两块上侧板4通过l型小连接件12连接,所述直流电机2安装在电机上支架3和电机下支架5上,所述电机上支架3和电机下支架5通过l型小连接件12与两块上侧板4固定,两块上侧板4再通过支撑块a14与l型大连接件13,所述l型大连接件13再通过支撑块b15安装在主支撑架的上层板上;两组连杆机构包括四根连杆10,两两一组,左右对称布置。
32.所述圆锥齿轮a6安装在直流电机2的输出轴上,所述圆锥齿轮b7与直齿轮a20通过塞打螺栓配合固定在同一轴向上,所述塞打螺栓再通过法兰轴承固定在第一转轴上,所述直齿轮b8通过塞打螺栓固定在第二转轴上,所述舵机支架17通过支撑块c16固定在电机下支架5的底部,所述夹持舵机19通过螺栓固定在舵机支架17上,外侧的一根连杆10通过舵盘
18和夹持舵机19连接,所述连杆的上下两端分别通过塞打螺栓和法兰轴承与上侧板4和下侧板22连接,所述直齿轮c21和同步带轮a9通过塞打螺栓和法兰轴承配合固定在同一轴上。同步带11和同步带轮a9、同步带轮b23和同步带轮c24相配合。夹持舵机19驱动连杆机构,带动下侧板部分向内夹紧食材,直流电机2再通过圆锥齿轮和直齿轮将力传递至同步带轮,使得同步带带动食材向下进给。
33.如图4所示,切割刀片26通过周转对食材进行切片,挡罩保证了切好的片都落入下环罩。
34.如图5所示,所述平底电推杆30通过螺栓安装在主支撑架的中层板上,所述夹刀件31通过螺栓固定在平底电推杆30的下端,所述切丝切丁刀片32通过螺栓固定在夹刀架31上,所述挡板40通过螺栓固定在中层板的底面上,所述步进电机支架37通过螺栓固定在主支撑架的下层板上,所述步进电机36安装在步进电机支架37上,所述左同步带轮38安装在步进电机36的输出端上,所述右同步带轮44通过塞打螺栓和锁紧螺母安装在同步带轮支架46上,所述同步带39与左同步带轮38和右同步带轮44配合,所述光轴支架45通过光轴支架支撑件47固定在主支撑架的下层板上,所述光轴43安装在光轴支架45上,所述厢式滑块35和光轴43相配合,所述平台底座34通过螺栓和厢式滑块35相配合,所述同步带39通过同步带压板41固定在平台底座34上,所述旋转舵机42安装在平台底座34的底部,所述旋转舵机42通过舵盘和平台33相配合。食材被切片装置切成片后,掉到平台上,再由步进电机带动同步带使得平台33移动,再与平底电推杆30配合实现切丝功能,若要实现切丁功能,则食材切成丝后,平台33旋转90
°
返程配合平底电推杆30即可完成切丁功能。
35.本发明的具体使用方法如下:
36.首先在操控面板上选择模式,配置好相关参数。将待处理的食材通过进料口1放入,食材下降到指定位置时触发光电传感器,同步带夹爪机构随即开始运动抓紧食材。食材抓紧后,食材进给装置上的直流电机2开始工作,通过齿轮输出带动同步带传动机构运动,将食材向下运输。食材运动到设定位置后,切割刀片26开始工作,将食材切成片,落到下方的平台33上。若选择为切片模式,则随后步进电机36开始工作,通过同步带39拉动平台,平台33越过挡板40所在的位置,食材被挡板40阻挡后落到下方的盘子里,一次切片工作完成。机器重复上述工作过程,直至将整个食材处理完毕;若为切丝模式,则随后步进电机36开始工作,通过同步带39拉动平台33,平台33移动到切丝切丁刀片32下方后,平底电推杆30开始做往复运动,通过切丝切丁刀片32将片状的食材切成丝状。随后,平台33继续移动越过挡板40所在的位置,食材被挡板40阻挡后落到下方的盘子里,一次切丝工作完成。机器重复上述工作过程,直至将整个食材处理完毕。若为切丁模式,则随后步进电机36开始工作,通过同步带39拉动平台33,平台33移动到切丝切丁刀片32下方后,平底电推杆30开始做往复运动,通过切丝切丁刀片32将片状的食材切成丝状。将食材切成丝后,平台33往回移动到开始切丝时的位置,同时平台33下方的旋转舵机42开始工作,将平台33旋转90
°
,然后再重复一次切丝工作,这样丝状的食材就被切成丁状。随后,平台33继续移动越过挡板40所在的位置,食材被挡板40阻挡后落到下方的盘子里,一次切丁工作完成。机器重复上述工作过程,直至将整个食材处理完毕。
37.以上所述仅为本发明的较佳实施例,并未限制本发明的专利范围,利用本发明说明书及附图内容所述结构,直接或间接运用在其他相关的技术领域,均应包括在本发明的
专利保护范围内。