1.本发明属于移载臂设备技术领域,具体是涉及一种多方向的电动移载臂。
背景技术:
2.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用,机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。
3.较大型的丝锭在内部进行搬运过程中,由于丝锭表面受力进行搬运就容易对丝线造成损伤,但是人工搬运就十分的费力费时,且同时丝锭需要进行上料时,无法有效省力进行操作,从而发明一款电动移载臂。
技术实现要素:
4.本发明主要是解决上述现有技术所存在的技术问题,提供一种多方向的电动移载臂。
5.本发明的上述技术问题主要是通过下述技术方案得以解决的:一种多方向的电动移载臂,包括纵向立架,其特征在于:所述纵向立架的顶部设置有动力设备,所述纵向立架的左右两侧均开设有侧边滑槽,所述纵向立架的正面设置有正面滑轨,所述正面滑轨上分别设置有第一安装架和第二安装架,所述正面滑轨上设置有多个滑块,所述第一安装架和第二安装架通过滑块滑动连接在正面滑轨上,所述滑块、第一安装架和第二安装架的正面均设置有安装面板,所述正面滑轨与纵向立架等高,所述正面滑轨上滑动连接有电动移载臂,所述电动移载臂背面由上向下分别与滑块、第一安装架和第二安装架相互连接,所述纵向立架的背面设置有背面滑轨,所述背面滑轨高度减半位于纵向立架的背面下方,所述背面滑轨的顶部设置有托架,所述托架的顶部设置有配电箱,所述托架下方的背面设置有影像屏,所述背面滑轨上分别设置有操作面板和操作握把,所述纵向立架的底部设置有底座,所述底座的上方的左右两侧均设置有丝杆限位装置,两个所述丝杆限位装置分别位于两侧的侧边滑槽最底端,所述纵向立架一侧的顶部和底部均设置有行程开关。
6.作为优选,所述动力设备包括第一伺服电机和动力丝杠,所述第一伺服电机连接在纵向立架的背面顶部,所述动力丝杠设置在纵向立架的内部且转动连接在底座上,所述第一伺服电机的输出端朝上设置,且在第一伺服电机的输出端和动力丝杠的顶部之间套接有传动皮带轮组。
7.作为优选,所述动力丝杠上套接有丝杠螺母,所述丝杠螺母上套接有螺母套,所述螺母套的左右两侧均设置有滑片,所述滑片通过侧边滑槽向纵向立架外部延伸,并与第一安装架的左右两侧相互连接,所述第一安装架上设置有固定座,所述滑片通过固定座与第一安装架相互固定连接。
8.作为优选,所述第一安装架的左右两侧顶部均设置有第一铰接架,所述第一铰接
架上铰接有第一平衡气缸,所述第一平衡气缸的输出端垂直向下与第二安装架的侧面通过螺钉固定插接。
9.作为优选,所述电动移载臂包括第一保护箱、旋转连接轴和第二保护箱,所述旋转连接轴用于连接第一保护箱和第二保护箱,所述第一保护箱的右侧设置有第二伺服电机,所述第二伺服电机的输出端设置有涡轮减速机,所述涡轮减速机设置在第一保护箱内,所述涡轮减速机的输出端与旋转连接轴相互连接,所述第一保护箱的左侧设置有设备箱,所述第一保护箱的背面分别与滑块、第一安装架和第二安装架相互连接。
10.作为优选,所述第二保护箱的背面分别设置有第一固定架和第二固定架,所述第二固定架位于第一固定架的下方,所述第二保护箱的顶部以及侧面均设置有设备接头,所述第一固定架的背面设置有多球笼,每个所述球笼的底部对应设置有第二平衡气缸,所述第二平衡气缸的输出端与第二固定架的背面相互连接,所述第二固定架的正面连接有连接气管,所述连接气管的输出端上设置有气涨轴,所述第二保护箱的底部设置有上下控压座,所述上下控压座的底部与连接气管相互搭接,所述气涨轴中部的前端设置有摄像头。
11.作为优选,所述纵向立架的左右两侧均设置有两个侧边连接条,两个侧边连接条对应设置在侧边滑槽的两侧,同侧的两个侧边连接条相互对向的一面均设置有毛刷。
12.作为优选,所述电动移载臂背面的一侧顶部设置有底部拖链固定架,所述配电箱的下方设置有顶部拖链固定架。
13.本发明具有的有益效果:电动移载臂可以通过纵向立架的设置,且纵向立架内设置的动力丝杠通过丝杠螺母以及螺母套带动两侧与其连接的第一安装架可以上下移动,且第一安装架连接电动移载臂,使得电动移载臂能够上下移动用于夹持物料后抬离地面进行收集,接着通过在纵向立架的正面设置有正面滑轨,电动移载臂用于在正面滑轨上进行上下滑动,从而方便进行限位的同时,且在上下移动时更加顺滑,接着在第一安装架和第二安装架之间设置有第一平衡气缸,通过设置第一平衡气缸用于减缓在上下升降过程中电动移载臂造成的下压,接着电动移载臂可以通过一侧的第二伺服电机以及涡轮减速机通过旋转连接轴进行转动,从而使得其下方的第二保护箱可以进行旋转,从而使得第二保护箱输出端上的气涨轴可以对丝锭进行夹持,且通过在气涨轴的输出端中部设置有摄像头,当在对丝锭进行夹持时,能够通过摄像头对位置进行观察,使得控制更加平稳,且在第二保护箱的背面设置有多个第二平衡气缸,且第二平衡气缸的输出端与下方的第二固定架相互连接,从而用于增加对气涨轴的平稳性。
附图说明
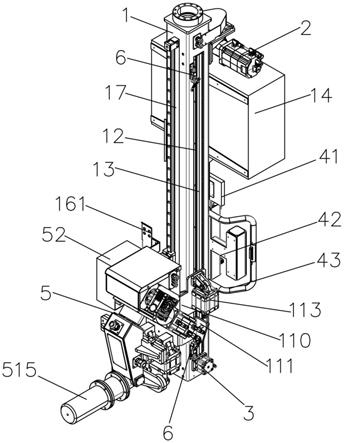
14.图1是本发明的一种立体结构示意图;
15.图2是本发明的一种背面结构示意图;
16.图3是本发明电动移载臂的一种立体结构示意图;
17.图4是本发明部分电动移载臂的一种立体结构示意图;
18.图5是本发明纵向立架的一种组合立体结构示意图;
19.图6是本发明纵向立架的一种拆分立体结构示意图;
20.图7是图5中a处的一种放大结构示意图。
21.图中:1、纵向立架;11、侧边滑槽;12、侧边连接条;13、毛刷;14、配电箱;15、底座;
161、底部拖链固定架;162、顶部拖链固定架;17、正面滑轨;18、安装面板;19、滑块;110、第一安装架;111、第二安装架;112、第一铰接架;113、第一平衡气缸;114、背面滑轨;115、托架;2、动力设备;21、第一伺服电机;22、传动皮带轮组;23、动力丝杠;24、丝杠螺母;25、螺母套;26、固定座;27、滑片;3、丝杆限位装置;31、伸缩气缸;32、连接片;33、刹车头;41、影像屏;42、操作面板;43、操作握把;5、电动移载臂;51、第一保护箱;52、设备箱;53、涡轮减速机;55、第二伺服电机;56、旋转连接轴;57、第二保护箱;58、设备接头;59、第一固定架;510、球笼;511、第二平衡气缸;512、第二固定架;513、上下控压座;514、连接气管;515、气涨轴;516、摄像头;6、行程开关。
具体实施方式
22.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
23.实施例:一种多方向的电动移载臂,如图1-图7所示,包括纵向立架1,纵向立架1的顶部设置有动力设备2,纵向立架1的左右两侧均开设有侧边滑槽11,纵向立架1的正面设置有正面滑轨17,正面滑轨17上分别设置有第一安装架110和第二安装架111,正面滑轨17上设置有多个滑块19,第一安装架110和第二安装架111通过滑块19滑动连接在正面滑轨17上,滑块19、第一安装架110和第二安装架111的正面均设置有安装面板18,正面滑轨17与纵向立架1等高,正面滑轨17上滑动连接有电动移载臂5,电动移载臂5背面由上向下分别与滑块19、第一安装架110和第二安装架111相互连接,纵向立架1的背面设置有背面滑轨114,背面滑轨114高度减半位于纵向立架1的背面下方,背面滑轨114的顶部设置有托架115,托架115的顶部设置有配电箱14,托架115下方的背面设置有影像屏41,背面滑轨114上分别设置有操作面板42和操作握把43,操作面板42和操作握把43与人体一般高度持平,从而方便工人操作,纵向立架1的底部设置有底座15,底座15的上方的左右两侧均设置有丝杆限位装置3,两个丝杆限位装置3分别位于两侧的侧边滑槽11最底端,纵向立架1一侧的顶部和底部均设置有行程开关6。
24.动力设备2包括第一伺服电机21和动力丝杠23,第一伺服电机21连接在纵向立架1的背面顶部,动力丝杠23设置在纵向立架1的内部且转动连接在底座15上,第一伺服电机21的输出端朝上设置,且在第一伺服电机21的输出端和动力丝杠23的顶部之间套接有传动皮带轮组22,动力丝杠23上套接有丝杠螺母24,丝杠螺母24上套接有螺母套25,螺母套25的左右两侧均设置有滑片27,滑片27通过侧边滑槽11向纵向立架1外部延伸,并与第一安装架110的左右两侧相互连接,第一安装架110上设置有固定座26,滑片27通过固定座26与第一安装架110相互固定连接,第一安装架110的左右两侧顶部均设置有第一铰接架112,第一铰接架112上铰接有第一平衡气缸113,第一平衡气缸113的输出端垂直向下与第二安装架111的侧面通过螺钉固定插接。
25.电动移载臂5包括第一保护箱51、旋转连接轴56和第二保护箱57,旋转连接轴56用于连接第一保护箱51和第二保护箱57,第一保护箱51的右侧设置有第二伺服电机55,第二伺服电机55的输出端设置有涡轮减速机53,涡轮减速机53设置在第一保护箱51内,涡轮减速机53的输出端与旋转连接轴56相互连接,第一保护箱51的左侧设置有设备箱52,第一保护箱51的背面分别与滑块19、第一安装架110和第二安装架111相互连接,第二保护箱57的背面分别设置有第一固定架59和第二固定架512,第二固定架512位于第一固定架59的下
方,第二保护箱57的顶部以及侧面均设置有设备接头58,第一固定架59的背面设置有多球笼510,每个球笼510的底部对应设置有第二平衡气缸511,第二平衡气缸511的输出端与第二固定架512的背面相互连接,第二固定架512的正面连接有连接气管514,连接气管514的输出端上设置有气涨轴515,第二保护箱57的底部设置有上下控压座513,上下控压座513的底部与连接气管514相互搭接,气涨轴515中部的前端设置有摄像头516。
26.纵向立架1的左右两侧均设置有两个侧边连接条12,两个侧边连接条12对应设置在侧边滑槽11的两侧,同侧的两个侧边连接条12相互对向的一面均设置有毛刷13,电动移载臂5背面的一侧顶部设置有底部拖链固定架161,配电箱14的下方设置有顶部拖链固定架162。
27.本发明的原理:当需要对下方的丝锭进行夹持移动时,此时该装置的顶部设置有用于前后左右移动的kbk轨道组件,且工人双手握持操作握把43控制操作面板42进行操作,此时开启位于顶部的动力设备2,其第一伺服电机21带动输出端的传动皮带轮组22进行传动带动动力丝杠23开始旋转,动力丝杠23带动表面套接的丝杠螺母24以及螺母套25进行上下移动,在丝杠螺母24上下移动时,带动连接在左右两侧的连接片32以及第一安装架110进行同步上下移动,在第一安装架110上下移动时,通过两侧连接的第一平衡气缸113与下方的第二安装架111进行控制,减缓上下移动时造成的抖动和偏移,接着通过气涨轴515输出端上的摄像头516观察下方丝锭的位置,从而控制气涨轴515插接在丝锭的中轴内,气涨轴515工作膨胀对丝锭进行夹持后,接着开启位于第一保护箱51一侧的第二伺服电机55,带动一端的旋转连接轴56开始转动,从而使得气涨轴515输出端上的丝锭可以进行平行,方便对丝锭的位置控制后,从而把丝锭移动至对应的工位进行操作。
28.最后,应当指出,以上实施例仅是本发明较有代表性的例子。显然,本发明不限于上述实施例,还可以有许多变形。凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均应认为属于本发明的保护范围。