1.本技术涉及一种拆卸装置。
背景技术:
2.目前在手机拆机过程中,需要将声学模块从手机外壳上拆解下来,但声学模块是通过侧边贴背胶并黏贴于外壳的内侧面,长时间黏贴导致背胶粘性牢固,传统的拆卸方式为人工拆解、手动作业,过程费时且人力需求大,导致效率低下的问题。
技术实现要素:
3.有鉴于此,有必要提供一种能够高效拆卸工件的拆卸装置。
4.本技术一实施例中提供一种拆卸装置,包括平面移动模组、第一升降模组、翻转模组及第一吸附件,第一升降模组连接于所述平面移动模组,所述平面移动模组用于驱动所述第一升降模组沿一平面方向移动;翻转模组连接于所述第一升降模组,所述第一升降模组用于驱动所述翻转模组沿垂直于所述平面方向移动;第一吸附件连接于所述翻转模组,所述第一吸附件用于吸附工件,所述翻转模组用于驱动所述第一吸附件沿一翻转轴翻转;所述平面移动模组及所述第一升降模组驱动所述第一吸附件靠近并吸附所述工件后,所述翻转模组驱动所述第一吸附件及所述工件翻转,以破坏所述工件与部件的连接,进而从所述部件上拆卸所述工件。
5.上述拆卸装置通过所述平面移动模组及所述第一升降模组驱动所述第一吸附件靠近并吸附所述工件后,所述翻转模组驱动所述第一吸附件及所述工件翻转,以破坏所述工件与部件的连接,进而从所述部件上拆卸所述工件,实现了高效拆卸工件的目的。
6.进一步地,在一些实施例中,所述拆卸装置还包括第二升降模组、平移驱动器及第二吸附件,所述第二升降模组连接于所述平面移动模组并随所述第一升降模组同步移动,所述平移驱动器连接于所述第二升降模组,所述第二吸附件连接于所述平移驱动器的驱动端,所述第二升降模组用于驱动所述平移驱动器沿垂直于所述平面方向移动,所述翻转模组翻转所述工件后,所述平移驱动器驱动所述第二吸附件靠近并吸附所述工件背离所述第一吸附件的一侧,使所述第一吸附件与所述第二吸附件夹持所述工件,夹持后所述平面移动模组驱动所述工件向远离所述部件的方向移动,以进一步破坏所述工件与所述部件的连接。
7.进一步地,在一些实施例中,所述第一升降模组包括平移支架、第一升降器、第一滑轨及第一升降架,所述平移支架连接于所述平面移动模组,所述第一滑轨设于所述平移支架并沿垂直于所述平面方向设置,所述第一升降架滑动连接于所述第一滑轨,所述第一升降器设于所述平移支架并用于驱动所述第一升降架沿所述第一滑轨移动,所述翻转模组设于所述第一升降架。
8.进一步地,在一些实施例中,所述第二升降模组包括第二升降器、第二滑轨及第二升降架,所述第二滑轨设于所述平移支架并平行于所述第一滑轨,所述第二升降架滑动连
接于所述第二滑轨,所述第二升降器设于所述平移支架并用于驱动所述第二升降架沿所述第二滑轨移动,所述平移驱动器设于所述第二升降架。
9.进一步地,在一些实施例中,所述翻转模组包括旋转器及旋转支架,所述旋转器设于所述第一升降架,所述旋转支架一端连接所述旋转器的驱动端,另一端连接所述第一吸附件。
10.进一步地,在一些实施例中,所述拆卸装置还包括视觉定位模组,所述视觉定位模组连接于所述第一升降模组,所述视觉定位模组用于定位所述第一吸附件与所述工件的吸附位置,以使所述第一吸附件的翻转轴与所述工件及所述部件的连接处重合,防止所述第一吸附件滑移发生破空现象。
11.进一步地,在一些实施例中,所述视觉定位模组包括相机、光源及反射镜,所述相机、所述光源及所述反射镜均固定连接于所述第一升降模组,所述光源用于照射所述工件,所述相机的镜头沿所述平面方向设置,所述反射镜用于将所述工件的影像反射至所述相机,以减少所述拆卸装置的体积。
12.进一步地,在一些实施例中,所述拆卸装置还包括拨针,所述拨针设于所述平移驱动器的驱动端,所述平移驱动器及所述平面移动模组用于驱动所述拨针拨开所述工件与所述部件之间的连接器,以避免所述连接器干扰所述工件翻转。
13.进一步地,在一些实施例中,所述拆卸装置还包括止挡模组,所述止挡模组包括挡片及止挡驱动器,所述止挡驱动器位置固定,所述挡片连接所述止挡驱动器的驱动端,在所述拨针拨开所述连接器后,所述止挡驱动器用于驱动所述挡片靠近所述连接器,以挡住所述连接器,避免所述拨针离开后所述连接器弹回。
14.进一步地,在一些实施例中,所述旋转支架连接所述旋转器的一端包括第一夹持部、第二夹持部及锁紧部,所述第一夹持部与所述第二夹持部之间设有相连通的间隙及夹孔,所述夹孔用于收容所述旋转器的转轴,所述锁紧部穿过所述间隙并连接所述第一夹持部与所述第二夹持部,所述锁紧部用于调节所述间隙的大小使所述第一夹持部与所述第二夹持部相靠近或远离,进而调节所述夹孔的大小以夹紧或松开所述旋转器的转轴,便于安装。
附图说明
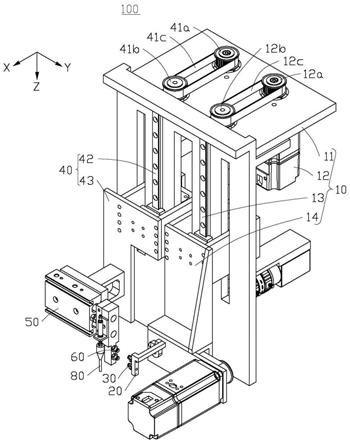
15.图1为本技术一实施方式中拆卸装置的立体示意图。
16.图2为图1中拆卸装置另一视角的立体示意图。
17.图3为一实施例中翻转模组的立体示意图。
18.图4为一实施例中视觉定位模组的立体示意图。
19.主要元件符号说明
20.拆卸装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
21.第一升降模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
22.平移支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
23.第一升降器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
24.第一主动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12a
25.第一从动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12b
26.第一传动带
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12c
27.第一滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13
28.第一升降架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14
29.翻转模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
30.旋转器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21
31.第三主动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21a
32.第三从动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21b
33.第三传动带
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21c
34.旋转支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22
35.第一夹持部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22a
36.第二夹持部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22b
37.锁紧部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22c
38.间隙
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22d
39.夹孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22e
40.支杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22f
41.第一吸附件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30
42.第二升降模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
43.第二升降器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41
44.第二主动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41a
45.第二从动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41b
46.第二传动带
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41c
47.第二滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42
48.第二升降架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
43
49.平移驱动器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
50
50.第二吸附件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
60
51.视觉定位模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
70
52.相机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
71
53.反射镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
72
54.拨针
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
80
具体实施方式
55.下面将结合本技术实施方式中的附图,对本技术的技术方案进行描述,显然,所描述的实施方式仅仅是本技术一部分实施方式,而不是全部的实施方式。
56.需要说明的是,当组件被称为
″
固定于
″
另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是
″
连接
″
另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是
″
设置于
″
另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语
″
垂直的
″
、
″
水平的
″
、
″
左
″
、
″
右
″
以及类似的表述只是为了说明的目的。
57.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的
技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本技术。本文所使用的术语
″
或/及
″
包括一个或多个相关的所列项目的任意的和所有的组合。
58.本技术一实施例中提供一种拆卸装置,包括平面移动模组、第一升降模组、翻转模组及第一吸附件,第一升降模组连接于所述平面移动模组,所述平面移动模组用于驱动所述第一升降模组沿一平面方向移动;翻转模组连接于所述第一升降模组,所述第一升降模组用于驱动所述翻转模组沿垂直于所述平面方向移动;第一吸附件连接于所述翻转模组,所述第一吸附件用于吸附工件,所述翻转模组用于驱动所述第一吸附件沿一翻转轴翻转;所述平面移动模组及所述第一升降模组驱动所述第一吸附件靠近并吸附所述工件后,所述翻转模组驱动所述第一吸附件及所述工件翻转,以破坏所述工件与部件的连接,进而从所述部件上拆卸所述工件。
59.上述拆卸装置通过所述平面移动模组及所述第一升降模组驱动所述第一吸附件靠近并吸附所述工件后,所述翻转模组驱动所述第一吸附件及所述工件翻转,以破坏所述工件与部件的连接,进而从所述部件上拆卸所述工件,实现了高效拆卸工件的目的。
60.下面结合附图,对本技术的一些实施方式作详细说明。在不冲突的情况下,下述的实施方式及实施方式中的特征可以相互组合。
61.请参阅图1,本技术提供一种拆卸装置100,用于将工件(图未示)从部件(图未示)上拆下来。拆卸装置100包括平面移动模组(图未示)、第一升降模组10、翻转模组20及第一吸附件30。平面移动模组位置固定。第一升降模组10连接于平面移动模组。平面移动模组用于驱动第一升降模组10沿xy平面方向移动。翻转模组20连接于第一升降模组10。第一升降模组10用于驱动翻转模组20沿z方向移动。第一吸附件30连接于翻转模组20,第一吸附件30用于吸附工件。翻转模组20用于驱动吸附有工件的第一吸附件30沿y方向的一翻转轴翻转,进而带动工件翻转。
62.平面移动模组及第一升降模组10驱动翻转模组20上的第一吸附件30在空间内沿xyz方向移动并靠近工件后,第一吸附件30吸附工件,吸附后,翻转模组20驱动第一吸附件30及工件翻转一定角度,以破坏工件与部件的连接,进而从部件上拆卸工件。作为示范性举例,平面移动模组为xy轴机架模块,xy平面为水平面,z方向为竖直方向,第一吸附件30为吸盘且并列设有两个,两个吸盘分别通过气管连通一真空发生器以吸附工件。在一实施例中,部件为手机外壳,工件为手机内的声学模块,声学模块大致呈矩形片状,声学模块的一侧壁通过背胶粘贴于手机外壳的内侧壁,拆卸过程中,手机外壳通过夹具(图未示)在水平方向固定,翻转模组20将声学模块翻转90度以破坏其与手机外壳的背胶连接。
63.拆卸装置100还包括第二升降模组40、平移驱动器50及第二吸附件60。第二升降模组40连接平面移动模组并随第一升降模组10在xy平面内同步移动。平移驱动器50连接于第二升降模组40。第二升降模组40用于驱动平移驱动器50沿z方向移动。第二吸附件60连接于平移驱动器50的驱动端。平移驱动器50用于驱动第二吸附件60沿x轴方向移动,以使第二吸附件60靠近或远离翻转的工件。作为示范性举例,平移驱动器50为气缸。
64.翻转模组20翻转工件后,平移驱动器50驱动第二吸附件60靠近工件,并吸附工件背离第一吸附件30的一侧,使第一吸附件30与第二吸附件60夹持工件,夹持后,平面移动模组驱动第一升降模组10及第二升降模组40共同移动,并带动工件移动,使工件向远离工件
与部件连接处的方向移动,以进一步破坏工件与部件的连接,并将工件从部件上扯掉,从而完成拆卸。
65.在一实施例中,第一升降模组10包括平移支架11、第一升降器12、第一滑轨13、第一升降架14、第一主动轮12a、第一从动轮12b及第一传动带12c。平移支架11连接于平面移动模组的移动端。第一滑轨13沿z方向设于平移支架11上。第一升降架14滑动连接于第一滑轨13。第一升降器12设于平移支架11上,用于驱动第一升降架14沿第一滑轨13往复移动。翻转模组20设于第一升降架14上,并随第一升降架14升降。当平移支架11移动至工件正上方后,第一升降器12驱动第一升降架14下降,以使翻转模组20上的第一吸附件30吸附工件。作为示范性举例,第一升降器12为直线丝杠电机,第一升降架14与丝杠螺纹连接,且第一升降器12通过第一主动轮12a、第一从动轮12b及第一传动带12c驱动丝杠转动,以减少第一升降模组10的总高度,第一主动轮12a连接第一升降器12的驱动端,丝杠同轴连接第一从动轮12b,第一传动带12c套设于第一主动轮12a及第一从动轮12b上用于传动。
66.请参阅图1与图2,在一实施例中,第二升降模组40包括第二升降器41、第二滑轨42、第二升降架43、第二主动轮41a、第二从动轮41b及第二传动带41c。第二滑轨42设于平移支架11,并平行于第一滑轨13设置。第二升降架43滑动连接于第二滑轨42。第二升降器41设于平移支架11并用于驱动第二升降架43沿第二滑轨42移动。平移驱动器50设于第二升降架43上,并随第二升降架43升降。作为示范性举例,第二升降器41为直线丝杠电机,第二升降架43与丝杠螺纹连接,且第二升降器41通过第二主动轮41a、第二从动轮41b及第二传动带41c驱动丝杠转动,以减少第二升降模组40的总高度,第二主动轮41a连接第二升降器41的驱动端,丝杠同轴连接第二从动轮41b,第二传动带41c套设于第二主动轮41a及第二从动轮41b上用于传动。
67.请参阅图3,翻转模组20包括旋转器21、旋转支架22、第三主动轮21a、第三从动轮21b及第三传动带21c。旋转器21设于第一升降架14。旋转支架22一端连接旋转器21的驱动端,另一端连接第一吸附件30。在一实施例中,旋转器21通过第三主动轮21a、第三从动轮21b及第三传动带21c驱动旋转支架22转动,第三主动轮21a连接于旋转器21的驱动轴,旋转支架22连接于第三从动轮21b的转轴,第三传动带21c套设于第三主动轮21a及第三从动轮21b上用于传动。在其他实施例中,旋转器21还可以通过齿轮组件驱动旋转支架22转动。
68.为了便于调节旋转支架22的角度,旋转支架22连接旋转器21的一端包括第一夹持部22a、第二夹持部22b及锁紧部22c。第一夹持部22a与第二夹持部22b一端相连接并呈u型,且第一夹持部22a与第二夹持部22b之间设有相连通的间隙22d及夹孔22e。夹孔22e用于收容第三从动轮21b的转轴。锁紧部22c穿过第一夹持部22a及间隙22d并连接第二夹持部22b。锁紧部22c用于调节间隙22d的大小使第一夹持部22a与第二夹持部22b相靠近或远离,进而调节夹孔22e的大小以夹紧或松开第三从动轮21b的转轴,从而便于将旋转支架22安装至第三从动轮21b的转轴,同时还能够调节旋转支架22与第三从动轮21b转轴之间的同轴角度。作为示范性举例,锁紧部22c为螺钉并与第二夹持部22b螺纹连接。
69.在一实施例中,旋转支架22还包括支杆22f。支杆22f大致呈l型,一端连接第二夹持部22b,另一端用于装设第一吸附件30。支杆22f在翻转前后能够使第一吸附件30分别朝向z方向及x方向,以使第一吸附件30能够吸附工件以及带动工件翻转。在其他实施例中,支杆22f可以替换成支板或其他的支撑结构。
70.请参阅图2及图4,拆卸装置100还包括视觉定位模组70,视觉定位模组70连接于平移支架11,视觉定位模组70用于视觉定位工件的位置,以使平移支架11带动第一吸附件30准确移动至工件的吸附位置,并保证第一吸附件30的翻转轴(即第三从动轮21b的转轴)与工件及部件的连接处重合,目的是确保在翻转过程中避免因不重合而发生吸附位置滑移,进而导致第一吸附件30破真空。
71.在一实施例中,视觉定位模组70包括相机71、光源(图未示)及反射镜72,相机71、光源及反射镜72均固定连接于平移支架11。光源用于照射工件使成像更清晰。相机71的镜头沿y方向设置。反射镜72呈45度倾斜设置,用于将下方工件的影像反射至相机71,以减少拆卸装置100在z方向的总高度及体积。
72.请参阅图1,拆卸装置100还包括拨针80,拨针80设于平移驱动器50的驱动端,并竖直向下设置。在翻转工件前,平面移动模组及平移驱动器50共同驱动拨针80沿x方向移动,以拨开工件与部件之间的连接器,以避免在翻转工件的过程中,连接器干扰工件翻转,导致工件拆卸失败。
73.在一实施例中,为了保证连接器远离工件,拆卸装置100还包括止挡模组(图未示)。止挡模组包括挡片及止挡驱动器。止挡驱动器与固定部件的夹具相连接,且位置固定。挡片连接止挡驱动器的驱动端。在拨针80拨开连接器后,止挡驱动器用于驱动挡片靠近连接器,以挡住连接器,避免拨针80离开后连接器弹回干扰工件翻转。
74.综上所述,拆卸装置100拆卸工件的一实施方式为:平面移动模组带动视觉定位模组70移动至工件上方,以对工件视觉定位;定位后,平面移动模组、第二升降模组40及平移驱动器50驱动拨针80移动至连接器处并拨开工件与部件之间的连接器;拨开后,止挡驱动器驱动挡片伸出以压住连接器;平面移动模组带动拨针80离开连接器,同时平面移动模组与第一升降模组10驱动第一吸附件30吸附工件;吸附后,翻转模组20驱动工件翻转90度以破坏其与部件的背胶连接;翻转后,平移驱动器50驱动第二吸附件60靠近工件,并吸附工件背离第一吸附件30的一侧,使第一吸附件30与第二吸附件60夹持工件;夹持后,平面移动模组驱动工件向远离工件与部件连接处的方向移动,将工件从部件上扯掉;扯掉后,第二吸附件60停止吸附,平移驱动器50驱动第二吸附件60远离工件,接着翻转模组20驱动工件反向翻转90度,第一吸附件30停止吸附,使工件掉落,从而完成拆卸。
75.上述拆卸装置100通过平面移动模组及第一升降模组10驱动第一吸附件30靠近并吸附工件后,翻转模组20驱动第一吸附件30及工件翻转,以破坏工件与部件的连接,进而从部件上拆卸工件,实现了高效拆卸工件的目的。
76.另外,本技术领域的普通技术人员应当认识到,以上的实施方式仅是用来说明本技术,而并非用作为对本技术的限定,只要在本技术的实质精神范围之内,对以上实施例所作的适当改变和变化都落在本技术的公开范围之内。